Quaternion
| 1 | je | j | k | |
|---|---|---|---|---|
| 1 | 1 | je | j | k |
| je | je | −1 | k | −j _ |
| j | j | − k | −1 | je |
| k | k | j | – je | −1 |
En mathématiques , le système de numération quaternion étend les nombres complexes . Les quaternions ont été décrits pour la première fois par le mathématicien irlandais William Rowan Hamilton en 1843 [1] [2] et appliqués à la mécanique dans l’espace tridimensionnel . Hamilton a défini un quaternion comme le quotient de deux lignes dirigées dans un espace tridimensionnel, [3] ou, de manière équivalente, comme le quotient de deux vecteurs . [4] La multiplication des quaternions est non commutative .
 Graphique Cayley Q8 montrant les 6 cycles de multiplication par i , j et k . (Dans le fichier SVG , survolez ou cliquez sur un cycle pour le mettre en surbrillance.)
Graphique Cayley Q8 montrant les 6 cycles de multiplication par i , j et k . (Dans le fichier SVG , survolez ou cliquez sur un cycle pour le mettre en surbrillance.)
Les quaternions sont généralement représentés sous la forme
a + b i + c j + d k {displaystyle a+b mathbf {i} +c mathbf {j} +d mathbf {k} } 
où a , b , c et d sont des nombres réels ; et i , j et k sont les quaternions de base .
Les quaternions sont utilisés en mathématiques pures , mais ont également des utilisations pratiques en mathématiques appliquées , en particulier pour les calculs impliquant des rotations tridimensionnelles , comme dans l’infographie tridimensionnelle , la vision par ordinateur et l’analyse de texture cristallographique . [5] Ils peuvent être utilisés parallèlement à d’autres méthodes de rotation, telles que les angles d’Euler et les matrices de rotation , ou comme alternative à celles-ci, selon l’application.
Dans le langage mathématique moderne , les quaternions forment une algèbre de division normée associative à quatre dimensions sur les nombres réels, et donc aussi un domaine . L’algèbre des quaternions est souvent notée H (pour Hamilton ), ou en noir gras par H . {displaystyle mathbb{H} .} 

D’après le théorème de Frobenius , l’algèbre H {displaystyle mathbb {H} } 
Les quaternions unitaires peuvent être considérés comme un choix d’une structure de groupe sur la 3-sphère S 3 qui donne le groupe Spin(3) , qui est isomorphe à SU(2) et aussi à la couverture universelle de SO(3) .
 Représentation graphique des produits d’unités quaternion sous forme de rotations de 90° dans les plans de l’espace à 4 dimensions couverts par deux parmi {1, i , j , k }. Le facteur de gauche peut être considéré comme étant tourné par le facteur de droite pour arriver au produit. Visuellement je ⋅ j = − ( j ⋅ je ) .
Représentation graphique des produits d’unités quaternion sous forme de rotations de 90° dans les plans de l’espace à 4 dimensions couverts par deux parmi {1, i , j , k }. Le facteur de gauche peut être considéré comme étant tourné par le facteur de droite pour arriver au produit. Visuellement je ⋅ j = − ( j ⋅ je ) .
- En bleu :
- 1 ⋅ je = je (1/ je plan)
- je ⋅ j = k ( plan i / k )
- En rouge :
- 1 ⋅ j = j (1/ j plan)
- j ⋅ je = − k ( j / k plan)
Histoire
 Plaque de Quaternion sur Brougham (Broom) Bridge , Dublin , qui dit :
Plaque de Quaternion sur Brougham (Broom) Bridge , Dublin , qui dit :
Ici, alors qu’il passait
le 16 octobre 1843,
Sir William Rowan Hamilton
, dans un éclair de génie, découvrit
la formule fondamentale de la
multiplication des quaternions
i 2 = j 2 = k 2 = ijk = −1
et la coupa sur une pierre de ce pont
Les quaternions ont été introduits par Hamilton en 1843. [7] Les précurseurs importants de ce travail comprenaient l’identité à quatre carrés d’Euler (1748) et la paramétrisation d ‘ Olinde Rodrigues des rotations générales par quatre paramètres (1840), mais aucun de ces auteurs n’a traité les quatre paramètres. rotations comme une algèbre. [8] [9] Carl Friedrich Gauss avait également découvert des quaternions en 1819, mais ce travail n’a été publié qu’en 1900. [10] [11]
Hamilton savait que les nombres complexes pouvaient être interprétés comme des points dans un plan , et il cherchait un moyen de faire de même pour les points dans un espace tridimensionnel . Les points dans l’espace peuvent être représentés par leurs coordonnées, qui sont des triplets de nombres, et pendant de nombreuses années, il avait su additionner et soustraire des triplets de nombres. Cependant, depuis longtemps, il était bloqué sur le problème de la multiplication et de la division. Il ne savait pas comment calculer le quotient des coordonnées de deux points dans l’espace. En fait, Ferdinand Georg Frobenius a prouvé plus tarden 1877 que pour qu’une algèbre de division sur les nombres réels soit de dimension finie et associative, elle ne peut pas être tridimensionnelle, et il n’y a que trois algèbres de division de ce type : R , C {displaystyle mathbb {R,C} } 
La grande percée des quaternions eut finalement lieu le lundi 16 octobre 1843 à Dublin , alors que Hamilton se rendait à la Royal Irish Academy où il allait présider une réunion du conseil. Alors qu’il marchait le long du chemin de halage du Canal Royal avec sa femme, les concepts derrière les quaternions prenaient forme dans son esprit. Lorsque la réponse lui vint à l’esprit, Hamilton ne put résister à l’envie de sculpter la formule des quaternions,
i 2 = j 2 = k 2 = i j k = − 1 {displaystyle mathbf {i} ^{2}=mathbf {j} ^{2}=mathbf {k} ^{2}=mathbf {i,j,k} =-1} 
dans la pierre de Brougham Bridge alors qu’il s’y arrêtait. Bien que la sculpture ait disparu depuis, il y a eu un pèlerinage annuel depuis 1989 appelé Hamilton Walk pour les scientifiques et les mathématiciens qui marchent de l’observatoire Dunsink au pont du canal royal en souvenir de la découverte de Hamilton.
Le jour suivant, Hamilton a écrit une lettre à son ami et collègue mathématicien, John T. Graves, décrivant le cheminement de pensée qui a conduit à sa découverte. Cette lettre fut publiée plus tard dans une lettre au Philosophical Magazine and Journal of Science de Londres, d’Édimbourg et de Dublin ; [12] Hamilton déclare :
Et là, m’est venue l’idée qu’il faut admettre, en quelque sorte, une quatrième dimension de l’espace dans le but de calculer avec des triplets… Un circuit électrique a semblé se fermer, et une étincelle a éclaté. [12]
Hamilton a appelé un quadruple avec ces règles de multiplication un quaternion , et il a consacré la majeure partie du reste de sa vie à les étudier et à les enseigner. Le traitement de Hamilton est plus géométrique que l’approche moderne, qui met l’accent sur les propriétés algébriques des quaternions . Il a fondé une école de « quaternionistes », et il a essayé de populariser les quaternions dans plusieurs livres. Le dernier et le plus long de ses livres, Elements of Quaternions , [13] comptait 800 pages ; il a été édité par son fils et publié peu de temps après sa mort.
Après la mort de Hamilton, le physicien mathématicien écossais Peter Tait est devenu le principal représentant des quaternions. À cette époque, les quaternions étaient un sujet d’examen obligatoire à Dublin. Les sujets de physique et de géométrie qui seraient maintenant décrits à l’aide de vecteurs, tels que la cinématique dans l’espace et les équations de Maxwell , ont été entièrement décrits en termes de quaternions. Il y avait même une association de recherche professionnelle, la Quaternion Society , consacrée à l’étude des quaternions et autres systèmes de nombres hypercomplexes .
À partir du milieu des années 1880, les quaternions ont commencé à être déplacés par l’analyse vectorielle , qui avait été développée par Josiah Willard Gibbs , Oliver Heaviside et Hermann von Helmholtz . L’analyse vectorielle décrivait les mêmes phénomènes que les quaternions, elle empruntait donc généreusement des idées et une terminologie à la littérature sur les quaternions. Cependant, l’analyse vectorielle était conceptuellement plus simple et plus propre sur le plan de la notation, et finalement les quaternions ont été relégués à un rôle mineur en mathématiques et en physique . Un effet secondaire de cette transition est que le travail de Hamiltonest difficile à comprendre pour de nombreux lecteurs modernes. Les définitions originales de Hamilton ne sont pas familières et son style d’écriture était verbeux et difficile à suivre.
Cependant, les quaternions ont connu un renouveau depuis la fin du 20e siècle, principalement en raison de leur utilité pour décrire les rotations spatiales . Les représentations des rotations par quaternions sont plus compactes et plus rapides à calculer que les représentations par matrices . De plus, contrairement aux angles d’Euler, ils ne sont pas sensibles au « gimbal lock ». Pour cette raison, les quaternions sont utilisés en infographie , [14] [15] vision par ordinateur , robotique , [16] théorie du contrôle , traitement du signal , contrôle d’attitude , physique , bioinformatique ,[17] [18] dynamique moléculaire , simulations informatiques et mécanique orbitale . Par exemple, il est courant que les systèmes de contrôle d’attitude des engins spatiaux soient commandés en termes de quaternions. Les quaternions ont reçu un nouvel élan de la théorie des nombres en raison de leurs relations avec les formes quadratiques . [19]
Quaternions en physique
L’essai de 1984 de PR Girard Le groupe des quaternions et la physique moderne [20] discute de certains rôles des quaternions en physique. L’essai montre comment divers groupes de covariance physique, à savoir SO(3) , le groupe de Lorentz, le groupe de la théorie générale de la relativité, l’algèbre de Clifford SU(2) et le groupe conforme, peuvent facilement être liés au groupe des quaternions dans l’algèbre moderne . Girard a commencé par discuter des représentations de groupe et par représenter certains groupes spatiaux de la cristallographie . Il a procédé à la cinématique du mouvement des corps rigides . Ensuite, il a utilisé des quaternions complexes (biquaternions ) pour représenter le groupe de Lorentz de la relativité restreinte, y compris la précession de Thomas . Il a cité cinq auteurs, à commencer par Ludwik Silberstein , qui ont utilisé une fonction potentielle d’une variable quaternion pour exprimer les équations de Maxwell en une seule équation différentielle . Concernant la relativité générale, il a exprimé le vecteur Runge-Lenz . Il a mentionné les biquaternions de Clifford ( split-biquaternions ) comme exemple d’algèbre de Clifford. Enfin, invoquant l’inverse d’un biquaternion, Girard a décrit des cartes conformes sur l’espace-temps. Parmi les cinquante références, Girard incluait Alexander Macfarlane et son Bulletin of the Quaternion Society . En 1999, il a montré comment les équations de la relativité générale d’Einstein pouvaient être formulées dans une algèbre de Clifford directement liée aux quaternions. [21]
La découverte de 1924 selon laquelle, en mécanique quantique, le spin d’un électron et d’autres particules de matière (appelées spineurs ) peut être décrit à l’aide de quaternions a renforcé leur intérêt; les quaternions ont permis de comprendre comment les rotations des électrons de 360° peuvent être distinguées de celles de 720° (le « Plate trick »). [22] [23] Depuis 2018 [update], leur utilisation n’a pas dépassé les groupes de rotation . [un]
Définition
Un quaternion est une expression de la forme
a + b i + c j + d k , {displaystyle a+b,mathbf {i} +c,mathbf {j} +d,mathbf {k} ,} 
où a , b , c , d , sont des nombres réels , et i , j , k , sont des symboles qui peuvent être interprétés comme des vecteurs unitaires pointant le long des trois axes spatiaux. En pratique, si l’un de a , b , c , d vaut 0, le terme correspondant est omis ; si a , b , c , d sont tous nuls, le quaternion est le quaternion nul , noté 0 ; si l’un de b , c , dest égal à 1, le terme correspondant s’écrit simplement i , j ou k .
Hamilton décrit un quaternion q = a + b i + c j + d k {displaystyle q=a+b,mathbf {i} +c,mathbf {j} +d,mathbf {k} } 

L’ensemble des quaternions devient un espace vectoriel à 4 dimensions sur les nombres réels, avec { 1 , i , j , k } {displaystyle left{1,mathbf {i} ,mathbf {j} ,mathbf {k} right}} 
( a 1 + b 1 i + c 1 j + d 1 k ) + ( a 2 + b 2 i + c 2 j + d 2 k ) = ( a 1 + a 2 ) + ( b 1 + b 2 ) i + ( c 1 + c 2 ) j + ( d 1 + d 2 ) k , {displaystyle (a_{1}+b_{1},mathbf {i} +c_{1},mathbf {j} +d_{1},mathbf {k} )+(a_{2 }+b_{2},mathbf {i} +c_{2},mathbf {j} +d_{2},mathbf {k} )=(a_{1}+a_{2}) +(b_{1}+b_{2}),mathbf {i} +(c_{1}+c_{2}),mathbf {j} +(d_{1}+d_{2}) ,mathbf {k} ,,} 
et la multiplication scalaire par composante
λ ( a + b i + c j + d k ) = λ a + ( λ b ) i + ( λ c ) j + ( λ d ) k . {displaystyle lambda (a+b,mathbf {i} +c,mathbf {j} +d,mathbf {k} )=lambda a+(lambda b),mathbf {je } +(lambda c),mathbf {j} +(lambda d),mathbf {k} .} 
Une structure de groupe multiplicative, appelée produit de Hamilton , notée juxtaposition, peut être définie sur les quaternions de la manière suivante :
- Le vrai quaternion 1 est l’ élément d’identité .
- Les quaternions réels commutent avec tous les autres quaternions, c’est-à-dire aq = qa pour tout quaternion q et tout quaternion réel a . En terminologie algébrique, cela revient à dire que le champ de quaternions réels est le centre de cette algèbre de quaternions.
- Le produit est d’abord donné pour les éléments de base (voir sous-section suivante), puis étendu à tous les quaternions en utilisant la propriété distributive et la propriété centrale des quaternions réels. Le produit de Hamilton n’est pas commutatif , mais associatif , ainsi les quaternions forment une algèbre associative sur les nombres réels.
- De plus, chaque quaternion non nul a un inverse par rapport au produit de Hamilton :
( a + b i + c j + d k ) − 1 = 1 a 2 + b 2 + c 2 + d 2 ( a − b i − c j − d k ) . {displaystyle (a+b,mathbf {i} +c,mathbf {j} +d,mathbf {k} )^{-1}={frac {1}{a^{2 }+b^{2}+c^{2}+d^{2}}},(ab,mathbf {i} -c,mathbf {j} -d,mathbf {k} ).} 
Ainsi les quaternions forment une algèbre de division.
Multiplication des éléments de base
| × | 1 | je | j | k |
|---|---|---|---|---|
| 1 | 1 | je | j | k |
| je | je | −1 | k | −j _ |
| j | j | − k | −1 | je |
| k | k | j | – je | −1 |
La multiplication par 1 des éléments de base i , j et k est définie par le fait que 1 est une identité multiplicative , c’est-à-dire
i 1 = 1 i = i , j 1 = 1 j = j , k 1 = 1 k = k . {displaystyle mathbf {i} ,1=1,mathbf {i} =mathbf {i} ,qquad mathbf {j} ,1=1,mathbf {j} =mathbf { j} ,qquad mathbf {k} ,1=1,mathbf {k} =mathbf {k} ,.} 
Les produits des éléments de base sont dérivés des règles de produit pour i {displaystyle mathbf {i}} 

i 2 = j 2 = − 1 {displaystyle mathbf {i} ^{2}=mathbf {j} ^{2}=-1} 
et
i j = k , j i = − k . {displaystyle {begin{aligned}mathbf {i,j} &=mathbf {k} ,,quad &mathbf {j,i} &=-mathbf {k} ,. fin{aligné}}} 
Les règles de produit restantes sont obtenues en multipliant les deux côtés de ces dernières règles par j {displaystyle mathbf {j} } 
j k = i , k j = − i , k i = j , i k = − j , i j k = − 1 , k 2 = − 1 {displaystyle {begin{aligned}mathbf {j,k} &=mathbf {i} ,,quad &mathbf {k,j} &=-mathbf {i} ,, \mathbf {k,i} &=mathbf {j} ,,quad &mathbf {i,k} &=-mathbf {j} ,,\mathbf {i,j ,k} &=-1,,quad &mathbf {k} ^{2}&=-1,\end{aligné}}} 
Centre
Le centre d’un anneau non commutatif est le sous-anneau d’éléments c tel que cx = xc pour tout x . Le centre de l’algèbre des quaternions est le sous-champ des quaternions réels. En fait, cela fait partie de la définition que les vrais quaternions appartiennent au centre. Inversement, si q = a + b i + c j + d k appartient au centre, alors
0 = i q − q i = 2 c i j + 2 d i k = 2 c k − 2 d j , {displaystyle 0=mathbf {i} ,qq,mathbf {i} =2c,mathbf {ij} +2d,mathbf {ik} =2c,mathbf {k} -2d ,mathbf {j} ,,} 
et c = ré = 0 . Un calcul similaire avec j au lieu de i montre que l’on a aussi b = 0 . Ainsi q = a est un quaternion réel .
Les quaternions forment une algèbre de division. Cela signifie que la non-commutativité de la multiplication est la seule propriété qui rend les quaternions différents d’un champ . Cette non-commutativité a des conséquences inattendues, parmi lesquelles le fait qu’une équation polynomiale sur les quaternions peut avoir des solutions plus distinctes que le degré du polynôme. Par exemple, l’équation z 2 + 1 = 0 , a une infinité de solutions de quaternions, qui sont les quaternions z = b i + c j + d k tels que b 2 + c 2 + d2 = 1 . Ainsi, ces “racines de -1” forment une sphère unitaire dans l’espace tridimensionnel des quaternions vectoriels.
Produit Hamilton
Pour deux éléments a 1 + b 1 i + c 1 j + d 1 k et a 2 + b 2 i + c 2 j + d 2 k , leur produit, appelé produit de Hamilton ( a 1 + b 1 i + c 1 j + ré 1 k ) ( une 2 + b 2 je +c 2 j + d 2 k ), est déterminé par les produits des éléments de base et de la loi distributive . La loi distributive permet de développer le produit pour qu’il soit une somme de produits d’éléments de base. Cela donne l’expression suivante :
a 1 a 2 + a 1 b 2 i + a 1 c 2 j + a 1 d 2 k + b 1 a 2 i + b 1 b 2 i 2 + b 1 c 2 i j + b 1 d 2 i k + c 1 a 2 j + c 1 b 2 j i + c 1 c 2 j 2 + c 1 d 2 j k + d 1 a 2 k + d 1 b 2 k i + d 1 c 2 k j + d 1 d 2 k 2 {displaystyle {begin{alignedat}{4}&a_{1}a_{2}&&+a_{1}b_{2}mathbf {i} &&+a_{1}c_{2}mathbf {j} &&+a_{1}d_{2}mathbf {k} \{}+{}&b_{1}a_{2}mathbf {i} &&+b_{1}b_{2}mathbf {i} ^{2}&&+b_{1}c_{2}mathbf {ij} &&+b_{1}d_{2}mathbf {ik} \{}+{}&c_{1}a_{2} mathbf {j} &&+c_{1}b_{2}mathbf {ji} &&+c_{1}c_{2}mathbf {j} ^{2}&&+c_{1}d_{2}mathbf {jk} \{}+{}&d_{1}a_{2}mathbf {k} &&+d_{1}b_{2}mathbf {ki} &&+d_{1}c_{2}mathbf {kj} &&+d_{1}d_{2}mathbf {k} ^{2}end{alignedat}}} 
Maintenant, les éléments de base peuvent être multipliés en utilisant les règles données ci-dessus pour obtenir : [7]
a 1 a 2 − b 1 b 2 − c 1 c 2 − d 1 d 2 + ( a 1 b 2 + b 1 a 2 + c 1 d 2 − d 1 c 2 ) i + ( a 1 c 2 − b 1 d 2 + c 1 a 2 + d 1 b 2 ) j + ( a 1 d 2 + b 1 c 2 − c 1 b 2 + d 1 a 2 ) k {displaystyle {begin{alignedat}{4}&a_{1}a_{2}&&-b_{1}b_{2}&&-c_{1}c_{2}&&-d_{1}d_{2}\{}+{}(&a_{1}b_{2}&&+b_{1}a_{2}&&+c_{1}d_{2}&&-d_{1}c_{2})mathbf {i} \{}+{}(&a_{1}c_{2}&&-b_{1}d_{2}&&+c_{1}a_{2}&&+d_{1}b_{2})mathbf {j} \{}+{}(&a_{1}d_{2}&&+b_{1}c_{2}&&-c_{1}b_{2}&&+d_{1}a_{2})mathbf {k} end{alignedat}}} 
Le produit de deux quaternions de rotation [25] sera équivalent à la rotation a 2 + b 2 i + c 2 j + d 2 k suivie de la rotation a 1 + b 1 i + c 1 j + d 1 k .
Parties scalaires et vectorielles
Un quaternion de la forme a + 0 i + 0 j + 0 k , où a est un nombre réel, est appelé scalaire , et un quaternion de la forme 0 + b i + c j + d k , où b , c , et d sont des nombres réels, et au moins l’un de b , c ou d est différent de zéro, est appelé un quaternion vectoriel . Si a + b je + c j +d k est un quaternion quelconque, alors a est appelé sa partie scalaire et b i + c j + d k est appelé sa partie vectorielle . Même si chaque quaternion peut être considéré comme un vecteur dans un espace vectoriel à quatre dimensions, il est courant de se référer à la partie vectorielle en tant que vecteurs dans un espace tridimensionnel. Avec cette convention, un vecteur est identique à un élément de l’espace vectoriel R 3 . {displaystyle mathbb{R} ^{3}.} 
Hamilton a également appelé quaternions vecteurs quaternions droits [27] [28] et nombres réels (considérés comme des quaternions à partie vectorielle nulle) quaternions scalaires .
Si un quaternion est divisé en une partie scalaire et une partie vectorielle, c’est-à-dire
q = ( r , v → ) , q ∈ H , r ∈ R , v → ∈ R 3 , {displaystyle mathbf {q} =(r, {vec {v}}),~~mathbf {q} in mathbb {H} ,~~rin mathbb {R} ,~~ {vec {v}}in mathbb {R} ^{3},} 
alors les formules d’addition et de multiplication sont
( r 1 , v → 1 ) + ( r 2 , v → 2 ) = ( r 1 + r 2 , v → 1 + v → 2 ) , {displaystyle (r_{1}, {vec {v}}_{1})+(r_{2}, {vec {v}}_{2})=(r_{1}+r_ {2}, {vec {v}}_{1}+{vec {v}}_{2}),} 

où ” ⋅ {displaystyle cdot } 

Conjugaison, norme et réciproque
La conjugaison des quaternions est analogue à la conjugaison des nombres complexes et à la transposition (également connue sous le nom d’inversion) des éléments des algèbres de Clifford. Pour le définir, laissons q = a + b i + c j + d k {displaystyle q=a+b,mathbf {i} +c,mathbf {j} +d,mathbf {k} } 

La conjugaison d’un quaternion, en contraste frappant avec le cadre complexe, peut être exprimée avec multiplication et addition de quaternions :
q ∗ = − 1 2 ( q + i q i + j q j + k q k ) . {displaystyle q^{*}=-{frac {1}{2}}(q+,mathbf {i} ,q,mathbf {i} +,mathbf {j} ,q ,mathbf {j} +,mathbf {k} ,q,mathbf {k} )~.} 
La conjugaison peut être utilisée pour extraire les parties scalaires et vectorielles d’un quaternion. La partie scalaire de p est1/2( p + p ∗ ) , et la partie vectorielle de p est 1/2( p – p ∗ ) .
La racine carrée du produit d’un quaternion avec son conjugué est appelée sa norme et est notée || q || (Hamilton a appelé cette quantité le tenseur de q , mais cela entre en conflit avec le sens moderne de « tenseur »). Dans les formules, cela s’exprime comme suit :
‖ q ‖ = q q ∗ = q ∗ q = a 2 + b 2 + c 2 + d 2 {displaystyle lVert qrVert ={sqrt {,qq^{*}~}}={sqrt {,q^{*}q~}}={sqrt {,a^{2 }+b^{2}+c^{2}+d^{2}~}}} 
C’est toujours un nombre réel non négatif, et c’est la même chose que la norme euclidienne sur H {displaystyle mathbb {H} } 
‖ α q ‖ = | α | ‖ q ‖ . {displaystyle lVert alpha qrVert =left|alpha right|,lVert qrVert ~.} 
C’est un cas particulier du fait que la norme est multiplicative , ce qui signifie que
‖ p q ‖ = ‖ p ‖ ‖ q ‖ {displaystyle lVert pqrVert =lVert prVert ,lVert qrVert } 
pour deux quaternions quelconques p et q . La multiplicativité est une conséquence de la formule du conjugué d’un produit. Alternativement, il découle de l’identité
det ( a + i b i d + c i d − c a − i b ) = a 2 + b 2 + c 2 + d 2 , {displaystyle det {begin{pmatrix}a+ib&id+c\id-c&a-ibend{pmatrix}}=a^{2}+b^{2}+c^{2}+d^ {2},} 
(où i désigne l’ unité imaginaire usuelle ) et donc de la propriété multiplicative des déterminants des matrices carrées.
Cette norme permet de définir la distance d ( p , q ) entre p et q comme la norme de leur différence :
d ( p , q ) = ‖ p − q ‖ . {displaystyle d(p,q)=lVert pqrVert ~.} 
Cela fait H {displaystyle mathbb {H} } 
Quaternion unitaire
Un quaternion unitaire est un quaternion de norme un. La division d’un quaternion non nul q par sa norme produit un quaternion unitaire U q appelé le verseur de q :
U q = q ‖ q ‖ . {displaystyle mathbf {U} q={frac {q}{lVert qrVert }}.} 
Tout quaternion a une décomposition polaire q = ‖ q ‖ ⋅ U q {displaystyle q=lVert qrVert cdot mathbf {U} q} 
L’utilisation de la conjugaison et de la norme permet de définir l’ inverse d’un quaternion non nul. Le produit d’un quaternion avec son inverse doit être égal à 1, et les considérations ci-dessus impliquent que le produit de q {displaystyle q} 

q − 1 = q ∗ ‖ q ‖ 2 . {displaystyle q^{-1}={frac {q^{*}}{lVert qrVert ^{2}}}.} 
Cela permet de diviser deux quaternions p et q de deux manières différentes (lorsque q est non nul). C’est-à-dire que leur quotient peut être p q −1 ou q −1 p ; en général, ces produits sont différents, selon l’ordre de multiplication, sauf pour le cas particulier où p et q sont des multiples scalaires l’un de l’autre (ce qui inclut le cas où p = 0 ). D’où la notation p/qest ambiguë car elle ne précise pas si q divise à gauche ou à droite (si q −1 multiplie p à sa gauche ou à sa droite).
Propriétés algébriques
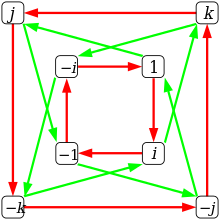 Graphique de Cayley de Q 8 . Les flèches rouges représentent la multiplication à droite par i , et les flèches vertes représentent la multiplication à droite par j .
Graphique de Cayley de Q 8 . Les flèches rouges représentent la multiplication à droite par i , et les flèches vertes représentent la multiplication à droite par j .
L’ensemble H {displaystyle mathbb {H} }
Puisqu’il est possible de diviser des quaternions, ils forment une algèbre de division. Il s’agit d’une structure similaire à un champ à l’exception de la non-commutativité de la multiplication. Les algèbres de division associative de dimension finie sur les nombres réels sont très rares. Le théorème de Frobenius stipule qu’il y en a exactement trois : R {displaystyle mathbb {R} } 

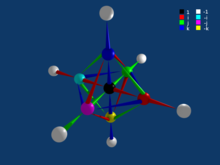 Graphique tridimensionnel de Q 8 . Les flèches rouges, vertes et bleues représentent la multiplication par i , j et k , respectivement. Les multiplications par des nombres négatifs sont omises pour plus de clarté.
Graphique tridimensionnel de Q 8 . Les flèches rouges, vertes et bleues représentent la multiplication par i , j et k , respectivement. Les multiplications par des nombres négatifs sont omises pour plus de clarté.
Étant donné que le produit de deux vecteurs de base quelconques est plus ou moins un autre vecteur de base, l’ensemble {±1, ± i , ± j , ± k } forme un groupe sous multiplication. Ce groupe non abélien est appelé groupe quaternion et est noté Q 8 . [29] L’ anneau de groupe réel de Q 8 est un anneau R [ Q 8 ] {displaystyle mathbb {R} [mathrm {Q} _{8}]} ![{displaystyle mathbb {R} [mathrm {Q} _{8}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/95e3ca1ed22f8ae5680236bb417a05d2e38886ae)


Quaternions et géométrie de l’espace
La partie vectorielle d’un quaternion peut être interprétée comme un vecteur de coordonnées dans R 3 ; {displaystyle mathbb {R} ^{3};} 
Pour le reste de cette section, i , j et k désigneront les trois vecteurs de base imaginaires [30] de H {displaystyle mathbb {H} }
Pour deux quaternions vectoriels p = b 1 i + c 1 j + d 1 k et q = b 2 i + c 2 j + d 2 k leur produit scalaire , par analogie aux vecteurs dans R 3 , { displaystyle mathbb {R} ^ {3},} 
p ⋅ q = b 1 b 2 + c 1 c 2 + d 1 d 2 . {displaystyle pcdot q=b_{1}b_{2}+c_{1}c_{2}+d_{1}d_{2}~.} 
Il peut également être exprimé d’une manière sans composant comme
p ⋅ q = 1 2 ( p ∗ q + q ∗ p ) = 1 2 ( p q ∗ + q p ∗ ) . {displaystyle pcdot q=textstyle {frac {1}{2}}(p^{*}q+q^{*}p)=textstyle {frac {1}{2}}(pq ^{*}+qp^{*}).} 
Ceci est égal aux parties scalaires des produits pq ∗ , qp ∗ , p ∗ q , et q ∗ p . Notez que leurs parties vectorielles sont différentes.
Le produit vectoriel de p et q par rapport à l’orientation déterminée par la base ordonnée i , j et k est
p × q = ( c 1 d 2 − d 1 c 2 ) i + ( d 1 b 2 − b 1 d 2 ) j + ( b 1 c 2 − c 1 b 2 ) k . {displaystyle ptimes q=(c_{1}d_{2}-d_{1}c_{2})mathbf {i} +(d_{1}b_{2}-b_{1}d_{2 })mathbf {j} +(b_{1}c_{2}-c_{1}b_{2})mathbf {k} ,.} 
(Rappelons que l’orientation est nécessaire pour déterminer le signe.) Celle-ci est égale à la partie vectorielle du produit pq (sous forme de quaternions), ainsi qu’à la partie vectorielle de − q ∗ p ∗ . Il a aussi la formule
p × q = 1 2 ( p q − q p ) . {displaystyle ptimes q=textstyle {tfrac {1}{2}}(pq-qp).} 
Pour le commutateur , [ p , q ] = pq − qp , de deux quaternions vecteurs on obtient
[ p , q ] = 2 p × q . {displaystyle [p,q]=2pfois q.} ![[p,q]=2ptimes q.](https://wikimedia.org/api/rest_v1/media/math/render/svg/c45178772ffab33a9936c42a9df2be320f5d22b8)
En général, soit p et q des quaternions et écrivent
p = p s + p v , {displaystyle p=p_{text{s}}+p_{text{v}},} 

où p s et q s sont les parties scalaires, et p v et q v sont les parties vectorielles de p et q . On a alors la formule
p q = ( p q ) s + ( p q ) v = ( p s q s − p v ⋅ q v ) + ( p s q v + q s p v + p v × q v ) . {displaystyle pq=(pq)_{text{s}}+(pq)_{text{v}}=(p_{text{s}}q_{text{s}}-p_{ text{v}}cdot q_{text{v}})+(p_{text{s}}q_{text{v}}+q_{text{s}}p_{text{v} }+p_{text{v}}fois q_{text{v}}).} 
Cela montre que la non-commutativité de la multiplication des quaternions provient de la multiplication des quaternions vectoriels. Il montre également que deux quaternions commutent si et seulement si leurs parties vectorielles sont colinéaires. Hamilton [31] a montré que ce produit calcule le troisième sommet d’un triangle sphérique à partir de deux sommets donnés et de leurs longueurs d’arc associées, qui est également une algèbre de points en géométrie elliptique .
Les quaternions unitaires peuvent être identifiés avec des rotations dans R 3 {displaystyle mathbb {R} ^{3}} 
Voir Hanson (2005) [32] pour la visualisation des quaternions.
Représentations matricielles
Tout comme les nombres complexes peuvent être représentés sous forme de matrices , les quaternions le peuvent aussi. Il existe au moins deux manières de représenter les quaternions sous forme de matrices de telle sorte que l’addition et la multiplication de quaternions correspondent à l’addition de matrice et à la multiplication de matrice . L’une consiste à utiliser des matrices complexes 2 × 2 et l’autre à utiliser des matrices réelles 4 × 4 . Dans chaque cas, la représentation donnée fait partie d’une famille de représentations liées linéairement. Dans la terminologie de l’algèbre abstraite , ce sont des homomorphismes injectifs de H {displaystyle mathbb {H} }
En utilisant des matrices complexes 2 × 2, le quaternion a + bi + cj + dk peut être représenté par
[ a + b i c + d i − c + d i a − b i ] . {displaystyle {begin{bmatrix}a+bi&c+di\-c+di&a-biend{bmatrix}}.} 
Notez que le “i” des nombres complexes est distinct du “i” des quaternions.
Cette représentation a les propriétés suivantes :
- Contraindre deux de b , c et d à zéro produit une représentation des nombres complexes. Par exemple, le réglage c = d = 0 produit une représentation matricielle complexe diagonale des nombres complexes, et le réglage b = d = 0 produit une représentation matricielle réelle.
- La norme d’un quaternion (la racine carrée du produit avec son conjugué, comme pour les nombres complexes) est la racine carrée du déterminant de la matrice correspondante. [33]
- Le conjugué d’un quaternion correspond à la transposée conjuguée de la matrice.
- Par restriction cette représentation donne un isomorphisme entre le sous-groupe des quaternions unitaires et leur image SU(2) . Topologiquement, les quaternions unitaires sont la 3-sphère, donc l’espace sous-jacent de SU (2) est également une 3-sphère. Le groupe SU(2) est important pour décrire le spin en mécanique quantique ; voir matrices de Pauli .
- Il existe une forte relation entre les unités quaternion et les matrices de Pauli. Obtenir les huit matrices unitaires quaternioniques en prenant a , b , c et d , mettre trois d’entre elles à zéro et la quatrième à 1 ou -1. La multiplication de deux matrices de Pauli donne toujours une matrice d’unité de quaternion, toutes sauf −1. On obtient −1 via {{nowrap| je 2 = j 2 = k 2 = ijk = −1 ; par exemple la dernière égalité est
i j k = σ 1 σ 2 σ 3 σ 1 σ 2 σ 3 = − 1 {displaystyle ijk=sigma _{1}sigma _{2}sigma _{3}sigma _{1}sigma _{2}sigma _{3}=-1} 
En utilisant des matrices réelles 4 × 4, ce même quaternion peut être écrit comme
[ a − b − c − d b a − d c c d a − b d − c b a ] = a [ 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ] + b [ 0 − 1 0 0 1 0 0 0 0 0 0 − 1 0 0 1 0 ] + c [ 0 0 − 1 0 0 0 0 1 1 0 0 0 0 − 1 0 0 ] + d [ 0 0 0 − 1 0 0 − 1 0 0 1 0 0 1 0 0 0 ] . {displaystyle {begin{bmatrix}a&-b&-c&-d\b&a&-d&c\c&d&a&-b\d&-c&b&aend{bmatrix}}=a{begin{bmatrix}1&0&0&0\0&1&0&0 �&0&1&0\0&0&0&1end{bmatrix}}+b{begin{bmatrix}0&-1&0&0\1&0&0&0\0&0&0&-1\0&0&1&0end{bmatrix}}+c{begin{bmatrix}0&0&-1&0 \0&0&0&1\1&0&0&0\0&-1&0&0end{bmatrix}}+d{begin{bmatrix}0&0&0&-1\0&0&-1&0\0&1&0&0\1&0&0&0end{bmatrix}}.} 
Cependant, la représentation des quaternions dans M(4, R ) n’est pas unique. Par exemple, le même quaternion peut également être représenté par
[ a d − b − c − d a c − b b − c a − d c b d a ] = a [ 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ] + b [ 0 0 − 1 0 0 0 0 − 1 1 0 0 0 0 1 0 0 ] + c [ 0 0 0 − 1 0 0 1 0 0 − 1 0 0 1 0 0 0 ] + d [ 0 1 0 0 − 1 0 0 0 0 0 0 − 1 0 0 1 0 ] . {displaystyle {begin{bmatrix}a&d&-b&-c\-d&a&c&-b\b&-c&a&-d\c&b&d&aend{bmatrix}}=a{begin{bmatrix}1&0&0&0\0&1&0&0\0&0&1&0\0&0&0&1end{bmatrix}}+b{begin{bmatrix}0&0&-1&0\0&0&0&-1\1&0&0&0\0&1&0&0end{bmatrix}}+c{begin{bmatrix}0&0&0&-1\0&0&1&0\0&-1&0&0\1&0&0&0end{bmatrix}}+d{begin{bmatrix}0&1&0&0\-1&0&0&0\0&0&0&-1\0&0&1&0end{bmatrix}}.} 
Il existe 48 représentations matricielles distinctes de cette forme dans lesquelles l’une des matrices représente la partie scalaire et les trois autres sont toutes antisymétriques. Plus précisément, il existe 48 ensembles de quadruples de matrices avec ces contraintes de symétrie telles qu’une fonction envoyant 1, i , j et k aux matrices du quadruplet est un homomorphisme, c’est-à-dire qu’elle envoie des sommes et des produits de quaternions à des sommes et produits de matrices. [34] Dans cette représentation, le conjugué d’un quaternion correspond à la transposée de la matrice. La quatrième puissance de la norme d’un quaternion est le déterminantde la matrice correspondante. Comme avec la représentation complexe 2 × 2 ci-dessus, les nombres complexes peuvent à nouveau être produits en contraignant les coefficients de manière appropriée; par exemple, sous forme de matrices diagonales de blocs avec deux blocs 2 × 2 en posant c = d = 0 .
Chaque représentation matricielle 4 × 4 de quaternions correspond à une table de multiplication de quaternions unitaires. Par exemple, la dernière représentation matricielle donnée ci-dessus correspond à la table de multiplication
| × | un | ré | − b | −c _ |
|---|---|---|---|---|
| un | un | ré | −b | −c |
| -d | -d | un | c | −b |
| b | b | −c _ | un | − d |
| c | c | b | ré | un |
qui est isomorphe — par { a ↦ 1 , b ↦ i , c ↦ j , d ↦ k } {displaystyle {amapsto 1,bmapsto i,cmapsto j,dmapsto k}} 
| × | 1 | k | – je | −j _ |
|---|---|---|---|---|
| 1 | 1 | k | – je | −j _ |
| − k | − k | 1 | j | – je |
| je | je | −j _ | 1 | − k |
| j | j | je | k | 1 |
Contraindre une telle table de multiplication à avoir l’identité dans la première ligne et la première colonne et à ce que les signes des en-têtes de ligne soient opposés à ceux des en-têtes de colonne, alors il y a 3 choix possibles pour la deuxième colonne (ignorant le signe), 2 possibles choix pour la troisième colonne (signe ignoré), et 1 choix possible pour la quatrième colonne (signe ignoré); ça fait 6 possibilités. Ensuite, la deuxième colonne peut être choisie positive ou négative, la troisième colonne peut être choisie positive ou négative et la quatrième colonne peut être choisie positive ou négative, ce qui donne 8 possibilités pour le signe. En multipliant les possibilités pour les positions des lettres et pour leurs signes, on obtient 48. Puis en remplaçant 1 par a , i par b, j avec c et k avec d et la suppression des en-têtes de ligne et de colonne donne une représentation matricielle de a + b i + c j + d k .
Théorème des quatre carrés de Lagrange
Les quaternions sont également utilisés dans l’une des preuves du théorème des quatre carrés de Lagrange en théorie des nombres , qui stipule que chaque entier non négatif est la somme de quatre carrés entiers. En plus d’être un théorème élégant à part entière, le théorème des quatre carrés de Lagrange a des applications utiles dans des domaines des mathématiques en dehors de la théorie des nombres, comme la théorie de la conception combinatoire. La preuve basée sur les quaternions utilise les quaternions de Hurwitz , un sous-anneau de l’anneau de tous les quaternions pour lequel il existe un analogue de l’ algorithme d’Euclide .
Quaternions comme paires de nombres complexes
Les quaternions peuvent être représentés par des paires de nombres complexes. De ce point de vue, les quaternions sont le résultat de l’application de la construction de Cayley-Dickson aux nombres complexes. Il s’agit d’une généralisation de la construction des nombres complexes sous forme de paires de nombres réels.
Laisser C 2 {displaystyle mathbb {C} ^{2}} 
( a + b i ) 1 + ( c + d i ) j . {displaystyle (a+bi)1+(c+di)mathbf {j} ,.} 
Si nous définissons j 2 = −1 et i j = − j i , alors nous pouvons multiplier deux vecteurs en utilisant la loi distributive. L’utilisation de k comme notation abrégée du produit i j conduit aux mêmes règles de multiplication que les quaternions usuels. Par conséquent, le vecteur de nombres complexes ci-dessus correspond au quaternion a + bi + c j + d k . Si nous écrivons les éléments de C 2 {displaystyle mathbb {C} ^{2}}
( a + b i , c + d i ) ↔ ( a , b , c , d ) . {displaystyle (a+bi, c+di)leftrightarrow (a,b,c,d).} 
Racines carrées
Racines carrées de −1
Dans les nombres complexes, C , {displaystyle mathbb{C} ,} 
a 2 − b 2 − c 2 − d 2 = − 1 , {displaystyle a^{2}-b^{2}-c^{2}-d^{2}=-1,} 



Pour satisfaire les trois dernières équations, soit a = 0 , soit b , c et d sont tous 0. Cette dernière est impossible car a est un nombre réel et la première équation impliquerait que a 2 = −1 . Par conséquent, a = 0 et b 2 + c 2 + d 2 = 1 .En d’autres termes : un quaternion est au carré de −1 si et seulement si c’est un quaternion vectoriel de norme 1. Par définition, l’ensemble de tous ces vecteurs forme la sphère unitaire.
Seuls les quaternions réels négatifs ont une infinité de racines carrées. Tous les autres n’en ont que deux (ou un dans le cas de 0). [ citation nécessaire ] [d]
En tant qu’union de plans complexes
Chaque paire de racines carrées de -1 crée une copie distincte des nombres complexes à l’intérieur des quaternions. Si q 2 = −1 , alors la copie est déterminée par la fonction
a + b − 1 ↦ a + b q . {displaystyle a+b{sqrt {-1,}}mapsto a+bq,.} 
Il s’agit d’un homomorphisme d’anneaux injectif de C {displaystyle mathbb {C} } 
Chaque quaternion non réel génère une sous- algèbre des quaternions qui est isomorphe à C , {displaystyle mathbb{C} ,} 
q = q s + q → v . {displaystyle q=q_{s}+{vec {q}}_{v}.} 
Décomposez davantage la partie vectorielle comme le produit de sa norme et de son verseur :
q = q s + ‖ q → v ‖ ⋅ U q → v = q s + q v ‖ q v ‖ . {displaystyle q=q_{s}+lVert {vec {q}}_{v}rVert cdot mathbf {U} {vec {q}}_{v}=q_{s}+{ frac {q_{v}}{|q_{v}|}}.} 
(Notez que ce n’est pas la même chose que q s + ‖ q ‖ ⋅ U q {displaystyle q_{s}+lVert qrVert cdot mathbf {U} q} 

a + b − 1 ↦ a + b U q → v {displaystyle a+b{sqrt {-1,}}mapsto a+bmathbf {U} {vec {q}}_{v}} 
définit un homomorphisme injectif d’ algèbres normées de C {displaystyle mathbb {C} } 
Comme H {displaystyle mathbb {H} }
Sous-anneaux commutatifs
La relation des quaternions entre eux dans les sous-plans complexes de H {displaystyle mathbb {H} }
Racines carrées de quaternions arbitraires
Tout quaternion q = ( r , v → ) {displaystyle mathbf {q} =(r,,{vec {v}})} 


q = ( r , v → ) = ± ( ‖ q ‖ + r 2 , v → ‖ v → ‖ ‖ q ‖ − r 2 ) , {displaystyle {sqrt {mathbf {q} }}={sqrt {(r,,{vec {v}},)}}=pm left({sqrt {frac { |mathbf {q} |+r}{2}}}, {frac {vec {v}}{|{vec {v}}|}}{sqrt {frac { |mathbf {q} |-r}{2}}}right),} 





Par conséquent, les quaternions non nuls et non scalaires, ou quaternions scalaires positifs, ont exactement deux racines, tandis que 0 a exactement une racine (0) et les quaternions scalaires négatifs ont une infinité de racines, qui sont les quaternions vecteurs situés sur { 0 } × S 2 ( − r ) {displaystyle {0}times S^{2}({sqrt {-r}})} 

Fonctions d’une variable quaternion
 Les ensembles de Julia et les ensembles de Mandelbrot peuvent être étendus aux Quaternions, mais ils doivent utiliser des coupes transversales pour être rendus visuellement en 3 dimensions. Cet ensemble de Julia est coupé au niveau du plan xy .
Les ensembles de Julia et les ensembles de Mandelbrot peuvent être étendus aux Quaternions, mais ils doivent utiliser des coupes transversales pour être rendus visuellement en 3 dimensions. Cet ensemble de Julia est coupé au niveau du plan xy .
Comme les fonctions d’une variable complexe , les fonctions d’une variable quaternion suggèrent des modèles physiques utiles. Par exemple, les champs électriques et magnétiques originaux décrits par Maxwell étaient des fonctions d’une variable quaternion. Des exemples d’autres fonctions incluent l’extension de l’ ensemble de Mandelbrot et des ensembles de Julia dans un espace à 4 dimensions. [36]
Fonctions exponentielles, logarithmiques et puissance
Étant donné un quaternion,
q = a + b i + c j + d k = a + v {displaystyle q=a+bmathbf {i} +cmathbf {j} +dmathbf {k} =a+mathbf {v} } 
l’exponentielle est calculée comme [37]
exp ( q ) = ∑ n = 0 ∞ q n n ! = e a ( cos ‖ v ‖ + v ‖ v ‖ sin ‖ v ‖ ) {displaystyle exp(q)=sum _{n=0}^{infty }{frac {q^{n}}{n!}}=e^{a}left(cos | mathbf {v} |+{frac {mathbf {v} }{|mathbf {v} |}}sin |mathbf {v} |right)~~} 
et le logarithme est [37]
ln ( q ) = ln ‖ q ‖ + v ‖ v ‖ arccos a ‖ q ‖ {displaystyle ln(q)=ln |q|+{frac {mathbf {v} }{|mathbf {v} |}}arccos {frac {a}{| q|}}~~} 
Il s’ensuit que la décomposition polaire d’un quaternion peut s’écrire
q = ‖ q ‖ e n ^ φ = ‖ q ‖ ( cos ( φ ) + n ^ sin ( φ ) ) , {displaystyle q=|q|e^{{hat {n}}varphi }=|q|left(cos(varphi )+{hat {n}}sin( varphi )droite),} 
où l’ angle φ {displaystylevarphi } 
a = ‖ q ‖ cos ( φ ) {displaystyle a=|q|cos(varphi )} 
et le vecteur unitaire n ^ {displaystyle {chapeau {n}}} 
v = n ^ ‖ v ‖ = n ^ ‖ q ‖ sin ( φ ) . {displaystyle mathbf {v} ={hat {n}}|mathbf {v} |={hat {n}}|q|sin(varphi ),.} 
Tout quaternion unitaire peut être exprimé sous forme polaire comme suit :
q = exp ( n ^ φ ) {displaystyle q=exp {({hat {n}}varphi )}} 
La puissance d’un quaternion élevée à un exposant arbitraire (réel) x est donnée par :
q x = ‖ q ‖ x e n ^ x φ = ‖ q ‖ x ( cos ( x φ ) + n ^ sin ( x φ ) ) . {displaystyle q^{x}=|q|^{x}e^{{hat {n}}xvarphi }=|q|^{x}left(cos(x varphi )+{hat {n}},sin(xvarphi )right)~.} 
Norme géodésique
La distance géodésique d g ( p , q ) entre les quaternions unitaires p et q est définie comme :
d g ( p , q ) = ‖ ln ( p − 1 q ) ‖ . {displaystyle d_{text{g}}(p,q)=lVert ln(p^{-1}q)rVert .} 
et équivaut à la valeur absolue de la moitié de l’angle sous-tendu par p et q le long d’un grand arc de la sphère S 3 . Cet angle peut également être calculé à partir du produit scalaire du quaternion sans le logarithme comme suit :
arccos ( 2 ( p ⋅ q ) 2 − 1 ) . {displaystyle arccos(2(pcdot q)^{2}-1).} 
Groupes de rotation tridimensionnels et quadridimensionnels
| Apprendre encore plus Cette section ne cite aucune source . ( Octobre 2018 ) Please help improve this section by adding citations to reliable sources. Unsourced material may be challenged and removed. (Learn how and when to remove this template message) |
Le mot « conjugaison », outre le sens donné ci-dessus, peut également signifier prendre un élément a à r a r −1 où r est un quaternion non nul. Tous les éléments conjugués à un élément donné (dans ce sens du mot conjugué) ont la même partie réelle et la même norme de la partie vectorielle. (Ainsi le conjugué dans l’autre sens est l’un des conjugués dans ce sens.)
Ainsi le groupe multiplicatif des quaternions non nuls agit par conjugaison sur la copie de R 3 {displaystyle mathbb {R} ^{3}}
- Éviter le verrouillage du cardan , un problème avec des systèmes tels que les angles d’Euler.
- Plus rapide et plus compact que les matrices .
- Représentation non singulière (par rapport aux angles d’Euler par exemple).
- Les paires de quaternions unitaires représentent une rotation dans l’espace 4D (voir Rotations dans l’espace euclidien à 4 dimensions : algèbre des rotations 4D ).
L’ensemble de tous les quaternions unitaires ( verseurs ) forme une 3-sphère S 3 et un groupe (un groupe de Lie ) sous multiplication, double recouvrant le groupe SO(3,R) de matrices réelles orthogonales 3×3 de déterminant 1 puisque deux unités les quaternions correspondent à chaque rotation sous la correspondance ci-dessus. Voir l’ astuce de la plaque .
L’image d’un sous-groupe de verseurs est un groupe de points , et inversement, la préimage d’un groupe de points est un sous-groupe de verseurs. La préimage d’un groupe ponctuel fini est appelée du même nom, avec le préfixe binary . Par exemple, la préimage du groupe icosaédrique est le groupe icosaédrique binaire .
Le groupe des verseurs est isomorphe à SU(2) , le groupe des matrices complexes unitaires 2×2 de déterminant 1.
Soit A l’ensemble des quaternions de la forme a + b i + c j + d k où a, b, c et d sont soit tous des entiers soit tous des demi-entiers . L’ensemble A est un anneau (en fait un domaine ) et un réseau et s’appelle l’anneau des quaternions de Hurwitz. Il y a 24 quaternions unitaires dans cet anneau, et ce sont les sommets d’une cellule régulière de 24 avec le symbole Schläfli {3,4,3}.Ils correspondent à la double couverture du groupe de symétrie de rotation du tétraèdre régulier . De même, les sommets d’une cellule 600 régulière avec le symbole de Schläfli {3,3,5 } peuvent être pris comme les icosiens unitaires , correspondant à la double couverture du groupe de symétrie de rotation de l’ icosaèdre régulier . La double couverture du groupe de symétrie de rotation de l’ octaèdre régulier correspond aux quaternions qui représentent les sommets de la 288-cellule disphénoïdale .
Algèbres de quaternions
Les Quaternions peuvent être généralisés en d’autres algèbres appelées algèbres de quaternions . Soit F un corps quelconque de caractéristique différente de 2, et a et b des éléments de F ; une algèbre associative unitaire à quatre dimensions peut être définie sur F de base 1, i , j et ij , où i 2 = a , j 2 = b et ij = − ji (so (ij) 2 = −a b).
Les algèbres de quaternion sont isomorphes à l’algèbre des matrices 2×2 sur F ou forment des algèbres de division sur F , selon le choix de a et b .
Quaternions comme partie paire de Cl 3,0 ( R )
L’utilité des quaternions pour les calculs géométriques peut être généralisée à d’autres dimensions en identifiant les quaternions comme la partie paire Cl 3 , 0 + ( R ) {displaystyle operatorname {Cl} _{3,0}^{+}(mathbb {R} )} 

σ 1 2 = σ 2 2 = σ 3 2 = 1 , {displaystyle sigma _{1}^{2}=sigma _{2}^{2}=sigma _{3}^{2}=1,} 

Si ces éléments de base fondamentaux sont pris pour représenter des vecteurs dans l’espace 3D, alors il s’avère que la réflexion d’un vecteur r dans un plan perpendiculaire à un vecteur unitaire w peut s’écrire :
r ′ = − w r w . {displaystyle r^{prime }=-w,r,w.} 
Deux réflexions font une rotation d’un angle double de l’angle entre les deux plans de réflexion, donc
r ′ ′ = σ 2 σ 1 r σ 1 σ 2 {displaystyle r^{prime prime}=sigma _{2}sigma _{1},r,sigma _{1}sigma _{2}} 
correspond à une rotation de 180° dans le plan contenant σ 1 et σ 2 . Ceci est très similaire à la formule de quaternion correspondante,
r ′ ′ = − k r k . {displaystyle r^{prime prime }=-mathbf {k} ,r,mathbf {k} .} 
En fait, les deux sont identiques, si on fait l’identification
k = σ 2 σ 1 , i = σ 3 σ 2 , j = σ 1 σ 3 , {displaystyle mathbf {k} =sigma _{2}sigma _{1},,quad mathbf {i} =sigma _{3}sigma _{2},,quad mathbf {j} =sigma _{1}sigma _{3},,} 
et il est simple de confirmer que cela préserve les relations de Hamilton
i 2 = j 2 = k 2 = i j k = − 1 . {displaystyle mathbf {i} ^{2}=mathbf {j} ^{2}=mathbf {k} ^{2}=mathbf {i,j,k} =-1~.} 
Dans cette image, les soi-disant “quaternions vectoriels” (c’est-à-dire les quaternions imaginaires purs) ne correspondent pas à des vecteurs mais à des bivecteurs – des quantités avec une amplitude et des orientations associées à des plans 2D particuliers plutôt qu’à des directions 1D . La relation avec les nombres complexes devient également plus claire : en 2D, avec deux directions vectorielles σ 1 et σ 2 , il n’y a qu’un seul élément de base bivecteur σ 1 σ 2 , donc un seul imaginaire. Mais en 3D, avec trois directions vectorielles, il y a trois éléments de base bivecteurs σ 1 σ 2 , σ 2 σ 3 , σ 3 σ 1 , donc trois imaginaires.
Ce raisonnement va plus loin. Dans l’algèbre de Clifford Cl 4 , 0 ( R ) , {displaystyle operatorname {Cl} _{4,0}(mathbb {R} ),} 
Il y a plusieurs avantages à placer les quaternions dans ce cadre plus large : [40]
- Les rotors font naturellement partie de l’algèbre géométrique et se comprennent facilement comme le codage d’une double réflexion.
- En algèbre géométrique, un rotor et les objets sur lesquels il agit vivent dans le même espace. Cela élimine le besoin de modifier les représentations et d’encoder de nouvelles structures et méthodes de données, ce qui est traditionnellement requis lors de l’augmentation de l’algèbre linéaire avec des quaternions.
- Les rotors sont universellement applicables à n’importe quel élément de l’algèbre, pas seulement aux vecteurs et autres quaternions, mais aussi aux lignes, plans, cercles, sphères, rayons, etc.
- Dans le modèle conforme de la géométrie euclidienne, les rotors permettent le codage de la rotation, de la translation et de la mise à l’échelle dans un seul élément de l’algèbre, agissant universellement sur n’importe quel élément. En particulier, cela signifie que les rotors peuvent représenter des rotations autour d’un axe arbitraire, alors que les quaternions sont limités à un axe passant par l’origine.
- Les transformations codées par rotor rendent l’interpolation particulièrement simple.
- Les rotors se transmettent naturellement aux espaces pseudo-euclidiens , par exemple, l’ espace de Minkowski de la relativité restreinte . Dans de tels espaces, les rotors peuvent être utilisés pour représenter efficacement les boosts de Lorentz et pour interpréter les formules impliquant les matrices gamma .
Pour plus de détails sur les utilisations géométriques des algèbres de Clifford, voir Algèbre géométrique .
Groupe Brauer
Les quaternions sont “essentiellement” la seule algèbre centrale simple (non triviale) sur les nombres réels, en ce sens que chaque CSA sur les nombres réels est l’ équivalent de Brauer soit des nombres réels, soit des quaternions. Explicitement, le groupe de Brauer des nombres réels se compose de deux classes, représentées par les nombres réels et les quaternions, où le groupe de Brauer est l’ensemble de tous les CSA, jusqu’à la relation d’équivalence d’un CSA étant un anneau matriciel sur un autre. Selon le théorème d’Artin-Wedderburn (en particulier, la partie de Wedderburn), les CSA sont toutes des algèbres matricielles sur une algèbre de division, et donc les quaternions sont la seule algèbre de division non triviale sur les nombres réels.
Les CSA – anneaux de dimension finie sur un champ, qui sont de simples algèbres (n’ont pas d’idéaux bilatéraux non triviaux, tout comme les champs) dont le centre est exactement le champ – sont un analogue non commutatif des champs d’extension et sont plus restrictifs que général extensions de bague. Le fait que les quaternions sont le seul CSA non trivial sur les nombres réels (jusqu’à l’équivalence) peut être comparé au fait que les nombres complexes sont la seule extension de champ fini non triviale des nombres réels.
Citations
Je la considère comme une inélégance, ou une imperfection, dans les quaternions, ou plutôt dans l’état où elle s’est déroulée jusqu’ici, toutes les fois qu’il devient ou semble devenir nécessaire de recourir à x, y, z, etc.
—William Rowan Hamilton [41]
On dit que le temps n’a qu’une seule dimension et que l’espace a trois dimensions. … Le quaternion mathématique participe de ces deux éléments; en langage technique, on peut dire qu’il est “temps plus espace”, ou “espace plus temps”: et en ce sens, il a, ou du moins implique une référence à quatre dimensions. Et comment l’Un du Temps, de l’Espace le Trois, pourrait être ceinturé dans la Chaîne des Symboles .
– William Rowan Hamilton [42] [ citation complète nécessaire ]
Quaternions est venu de Hamilton après que son très bon travail ait été fait; et, bien que magnifiquement ingénieux, ils ont été un mal absolu pour ceux qui les ont touchés de quelque manière que ce soit, y compris Clerk Maxwell .
– W. Thompson, Lord Kelvin (1892) [ citation nécessaire ]
Je suis venu plus tard pour voir que, en ce qui concerne l’analyse vectorielle dont j’avais besoin, non seulement le quaternion n’était pas nécessaire, mais était un mal positif d’une ampleur non négligeable ; et que par son évitement l’établissement de l’analyse vectorielle était rendu assez simple et son fonctionnement également simplifié, et qu’il pouvait être commodément harmonisé avec le travail cartésien ordinaire.
— Olivier Heaviside (1893) [43]
Ni les matrices ni les quaternions et les vecteurs ordinaires n’ont été bannis de ces dix chapitres [supplémentaires]. Car, malgré la puissance incontestée du calcul tenseur moderne, ces langages mathématiques plus anciens continuent, à mon avis, à offrir des avantages remarquables dans le domaine restreint de la relativité restreinte. De plus, dans la science comme dans la vie de tous les jours, la maîtrise de plus d’une langue est aussi précieuse, car elle élargit nos vues, est propice à la critique à l’égard de, et préserve de l’hypostase [fondement faible] de, la matière exprimée. par des mots ou des symboles mathématiques.
– Ludwik Silberstein (1924) [44] [ citation complète nécessaire ]
… les quaternions semblent dégager un air de décadence du XIXe siècle, en tant qu’espèce plutôt infructueuse dans la lutte pour la vie des idées mathématiques. Les mathématiciens, certes, gardent toujours une place chaleureuse dans leur cœur pour les remarquables propriétés algébriques des quaternions mais, hélas, un tel enthousiasme signifie peu pour le physicien à la tête dure.
– Simon L. Altmann (1986) [45]
Voir également
- Conversion entre quaternions et angles d’Euler
- Double quaternion
- Numéro à double complexe
- Algèbre extérieure
- Ordre des quaternions de Hurwitz
- Quaternion hyperbolique
- Sphère de Lénart
- Matrices de Pauli
- Matrice quaternionique
- Polytope quaternionique
- Espace projectif quaternionique
- Rotations dans l’espace euclidien à 4 dimensions
- Slerp
- Quaternion divisé
- Tesseract
Remarques
- ^ Une vision plus personnelle des quaternions a été écrite par Joachim Lambek en 1995. Il a écrit dans son essai Si Hamilton avait prévalu: les quaternions en physique : “Mon propre intérêt en tant qu’étudiant diplômé a été suscité par le livre inspirant de Silberstein”. Il a conclu en déclarant “Je crois fermement que les quaternions peuvent fournir un raccourci pour les mathématiciens purs qui souhaitent se familiariser avec certains aspects de la physique théorique.” Lambek, J. (1995). “Si Hamilton avait prévalu: Quaternions en physique”. Math. Intelligencer . Vol. 17, non. 4. p. 7–15. doi : 10.1007/BF03024783 .
- ↑ Il est important de noter que la partie vectorielle d’un quaternion est, en vérité, un vecteur « axial » ou « pseudovecteur », et non un vecteur ordinaire ou « polaire », comme l’a formellement prouvé Altmann (1986). [26] Un vecteur polaire peut être représenté dans les calculs (par exemple, pour la rotation par un quaternion “transformée de similarité”) par un quaternion imaginaire pur, sans perte d’information, mais les deux ne doivent pas être confondus. L’axe d’un quaternion de rotation “binaire” (180°) correspond à la direction du vecteur polaire représenté dans un tel cas.
- ^ En comparaison, les nombres réels R {displaystyle mathbb {R} }
ont la dimension 1, les nombres complexes C {displaystyle mathbb {C} }
ont la dimension 2, et les octonions O {displaystyle mathbb {O}}
ont la dimension 8.
- ^ L’identification des racines carrées de moins un dans H {displaystyle mathbb {H} }
a été donnée par Hamilton [35] mais a été fréquemment omise dans d’autres textes. En 1971, la sphère a été incluse par Sam Perlis dans son exposition de trois pages incluse dans Historical Topics in Algebra (page 39) publiée par le National Council of Teachers of Mathematics . Plus récemment, la sphère des racines carrées de moins un est décrite dans le livre de Ian R. Porteous Clifford Algebras and the Classical Groups (Cambridge, 1995) dans la proposition 8.13 à la page 60.
- ^ Les livres sur les mathématiques appliquées, comme Corke (2017) [38] utilisent souvent une notation différente avec φ := 1/2θ — c’est-à-dire une autre variable θ = 2 φ .
Références
- ^ “Sur les Quaternions; ou sur un nouveau Système d’Imaginaires en Algèbre”. Lettre à John T. Graves . 17 octobre 1843.
- ^ Rozenfel’d, Boris Abramovich (1988). L’histoire de la géométrie non euclidienne : évolution du concept d’espace géométrique . Springer. p. 385. ISBN 9780387964584.
- ^ Hamilton . Hodges et Smith. 1853. p. 60 . quaternion quotient lignes espace-temps tridimensionnel
- ^ Robuste 1881 . Ginn, Heath, & co. 1881. p. 32. ISBN 9781429701860.
- ^ Kunze, Karsten; Schaeben, Helmut (novembre 2004). “La distribution Bingham des quaternions et sa transformation sphérique du radon dans l’analyse de texture”. Géologie mathématique . 36 (8): 917–943. doi : 10.1023/B:MATG.0000048799.56445.59 . S2CID 55009081 .
- ^ Forgeron, Frank (Tony). “Pourquoi pas sédenion?” . Récupéré le 8 juin 2018 .
- ^ un bc Voir Hazewinkel, Gubareni & Kirichenko 2004 , p. 12
- ^ Conway & Smith 2003 , p. 9
- ^ Bradley, Robert E.; Sandifer, Charles Édouard (2007). Leonhard Euler : vie, travail et héritage . p. 193. ISBN 978-0-444-52728-8.Ils mentionnent l’affirmation de Wilhelm Blaschke en 1959 selon laquelle “les quaternions ont été identifiés pour la première fois par L. Euler dans une lettre à Goldbach écrite le 4 mai 1748”, et ils commentent que “cela n’a aucun sens de dire qu’Euler a “identifié” le quaternions dans cette lettre… cette affirmation est absurde.”
- ^ Pujol, J., ” Hamilton, Rodrigues, Gauss, Quaternions et Rotations: Une réévaluation historique “ Communications en analyse mathématique (2012), 13 (2), 1–14
- ^ Gauss, CF (1900). “Mutationen des Raumes [Transformations de l’espace] (vers 1819)”. Dans Martin Brendel (éd.). Carl Friedrich Gauss Werke [ Les œuvres de Carl Friedrich Gauss ]. Vol. 8. article édité par le professeur Stäckel de Kiel, Allemagne. Göttingen, DE : Königlichen Gesellschaft der Wissenschaften [Société royale des sciences]. pp. 357–361.
- ^ un b Hamilton, WR (1844). “Lettre”. Londres, Édimbourg et Dublin Philosophical Magazine et Journal of Science . Vol. xxv. p. 489–495.
- ^ Hamilton, monsieur WR (1866). Hamilton, WE (éd.). Éléments de Quaternions . Londres : Longmans, Green, & Co.
- ^ un Shoemake b , Ken (1985). “Animation de la rotation avec des courbes de quaternion” (PDF) . Infographie . 19 (3): 245-254. doi : 10.1145/325165.325242 . Présenté au SIGGRAPH ’85.
- ^ Tomb Raider (1996) est souvent cité comme le premier jeu informatique grand public à avoir utilisé des quaternions pour obtenir des rotations tridimensionnelles fluides. Voir, par exemple, Nick Bobick (juillet 1998). “Rotation d’objets à l’aide de quaternions” . Développeur de jeux .
- ^ McCarthy, JM (1990). Une introduction à la cinématique théorique . Presse du MIT. ISBN 978-0-262-13252-7.
- ^ Shu, Jian-Jun; Ouw, LS (2004). “Alignement par paires de la séquence d’ADN en utilisant la représentation numérique hypercomplexe”. Bulletin de biologie mathématique . 66 (5): 1423-1438. arXiv : 1403.2658 . doi : 10.1016/j.bulm.2004.01.005 . PMID 15294431 . S2CID 27156563 .
- ^ Shu, Jian-Jun; Li, Y. (2010). “Corrélation croisée hypercomplexe de séquences d’ADN”. Journal des systèmes biologiques . 18 (4): 711–725. arXiv : 1402.5341 . doi : 10.1142/S0218339010003470 . S2CID 5395916 .
- ^ Hurwitz, A. (1919), Vorlesungen über die Zahlentheorie der Quaternionen , Berlin: J. Springer, JFM 47.0106.01 , concernant les quaternions de Hurwitz
- ^ Girard, PR (1984). “Le groupe des quaternions et la physique moderne”. Journal européen de physique . 5 (1): 25–32. Bibcode : 1984EJPh….5…25G . doi : 10.1088/0143-0807/5/1/007 .
- ^ Girard, Patrick R. (1999). “Les équations d’Einstein et l’algèbre de Clifford” (PDF) . Avancées en algèbres de Clifford appliquées . 9 (2): 225–230. doi : 10.1007/BF03042377 . S2CID 122211720 . Archivé de l’original (PDF) le 17 décembre 2010.
- ^ Huerta, John (27 septembre 2010). “Présentation des Quaternions” (PDF) . Archivé (PDF) de l’original le 2014-10-21 . Récupéré le 8 juin 2018 .
- ^ Bois, Charlie (6 septembre 2018). “Les nombres étranges qui ont donné naissance à l’algèbre moderne” . Blog des abstractions . Revue Quanta.
- ^ Eves (1976 , p.391)
- ^ “Maths – Transformations utilisant des Quaternions” . Espace euclidien . Une rotation de q1 suivie d’une rotation de q2 équivaut à une seule rotation de q2 q1 . Notez l’inversion de l’ordre, c’est-à-dire que nous plaçons la première rotation du côté droit de la multiplication.
- ^ Altmann, rotations SL, quaternions et groupes doubles . Ch. 12.
- ^ Hamilton, Sir William Rowan (1866). “Article 285”. Éléments de Quaternions . Longmans, Green, & Company. p. 310 .
- ^ Robuste (1881). “Éléments de Quaternions” . Sciences . bibliothèque.cornell.edu. 2 (75): 65. doi : 10.1126/science.os-2.75.564 . PMID 17819877 .
- ^ “groupe de quaternions” . Wolframalpha.com .
- ^ Gibbs, J. Willard; Wilson, Edwin Bidwell (1901). Analyse vectorielle . Presse universitaire de Yale. p. 428 . dyadique du tenseur droit
- ^ un b Hamilton, WR (1844–1850). “Sur les quaternions ou un nouveau système d’imaginaires en algèbre” . Collection David R. Wilkins. Revue Philosophique . Collège Trinity, Dublin .
- ^ “Visualiser les Quaternions” . Morgan-Kaufmann/Elsevier. 2005.
- ^ “[aucun titre cité; évaluation déterminante]” . Wolframalpha.com .
- ^ Adieu, Richard William; Gross, Jürgen; Troschke, Sven-Oliver (2003). “Représentation matricielle des quaternions” . Algèbre linéaire et ses applications . 362 : 251–255. doi : 10.1016/s0024-3795(02)00535-9 .
- ^ Hamilton, WR (1899). Éléments de Quaternions (2e éd.). p. 244. ISBN 1-108-00171-8.
- ^ “[aucun titre cité]” (PDF) . bridgesmathart.org . archiver . Récupéré le 19 août 2018 .
- ^ un b Särkkä, Simo (28 juin 2007). “Notes sur les quaternions” (PDF) . Lce.hut.fi . Archivé de l’original (PDF) le 5 juillet 2017.
- ^ Corke, Peter (2017). Robotique, vision et contrôle – Algorithmes fondamentaux dans MATLAB® . Springer . ISBN 978-3-319-54413-7.
- ^ Parc, FC; Ravani, Bahram (1997). “Interpolation invariante lisse des rotations”. Transactions ACM sur les graphiques . 16 (3): 277-295. doi : 10.1145/256157.256160 . S2CID 6192031 .
- ^ “Quaternions et algèbre géométrique” . geometrialgebra.net . Récupéré le 12/09/2008 . Voir aussi : Dorst, Leo ; Fontijne, Daniel; Mann, Stephen (2007). Algèbre géométrique pour l’informatique . Morgan Kaufman . ISBN 978-0-12-369465-2.
- ↑ Cité d’une lettre de Tait à Cayley. [ citation nécessaire ]
- ^ Graves, RP Vie de Sir William Rowan Hamilton .
- ^ Heaviside, Olivier (1893). Théorie électromagnétique . Vol. I. Londres, Royaume-Uni : The Electrician Printing and Publishing Company. p. 134–135.
- ^ Ludwik Silberstein (1924). Notes sur la préparation de la deuxième édition de sa théorie de la relativité .
- ^ Altmann, Simon L. (1986). Rotations, quaternions et groupes doubles . Presse Clarendon. ISBN 0-19-855372-2. RCAC 85013615 .
Lectures complémentaires
Livres et éditions
- Hamilton, William Rowan (1844). “Sur les quaternions, ou sur un nouveau système d’imaginaires en algèbre” . Revue Philosophique . 25 (3): 489–495. doi : 10.1080/14786444408645047 .*
- Hamilton, William Rowan (1853), ” Conférences sur les quaternions “. Académie royale d’Irlande.
- Hamilton (1866) Éléments de Quaternions University of Dublin Press. Edité par William Edwin Hamilton, fils de l’auteur décédé.
- Hamilton (1899) Éléments de Quaternions volume I, (1901) volume II. Edité par Charles Jasper Joly ; publié par Longmans, Green & Co.
- Tait, Peter Guthrie (1873), ” Un traité élémentaire sur les quaternions “. 2e éd., Cambridge, [Eng.] : The University Press.
- Maxwell, James Clerk (1873), ” Un traité sur l’électricité et le magnétisme “. Clarendon Press, Oxford.
- Tait, Peter Guthrie (1886), ” ” Copie archivée ” . Archivé de l’original le 8 août 2014 . Récupéré le 26 juin 2005 . {{cite web}}: CS1 maint: archived copy as title (link) CS1 maint: unfit URL (link)“. MA Sec. RSE Encyclopædia Britannica , Neuvième édition, 1886, Vol. XX, pp. 160–164. ( fichier PostScript bzippé )
- Joly, Charles Jaspe (1905). Un manuel de quaternions . Macmillan. RCAC 05036137 .
- Macfarlane, Alexandre (1906). Analyse vectorielle et quaternions (4e éd.). Wiley. RCAC 16000048 .
- Chisholm, Hugh, éd. (1911). “Algèbre” . Encyclopædia Britannica (11e éd.). La presse de l’Universite de Cambridge.( Voir la section sur les quaternions. )
- Finkelstein, David; Jauch, Josef M.; Schiminovitch, Samuel; Speiser, David (1962). “Fondements de la mécanique quantique des quaternions”. J. Math. Phys . 3 (2): 207-220. Bibcode : 1962JMP…..3..207F . doi : 10.1063/1.1703794 .
- Du Val, Patrick (1964). Homographies, quaternions et rotations . Monographies mathématiques d’Oxford. Presse Clarendon. RCAC 64056979 .
- Crowe, Michael J. (1967), Une histoire de l’analyse vectorielle : l’évolution de l’idée d’un système vectoriel , University of Notre Dame Press. Étudie les systèmes vectoriels majeurs et mineurs du 19ème siècle (Hamilton, Möbius, Bellavitis, Clifford, Grassmann, Tait, Peirce, Maxwell, Macfarlane, MacAuley, Gibbs, Heaviside).
- En ligneAltmann, Simon L. (1989). “Hamilton, Rodrigues et le scandale du Quaternion”. Revue Mathématiques . 62 (5): 291-308. doi : 10.1080/0025570X.1989.11977459 .
- Adler, Stephen L. (1995). Mécanique quantique quaternionique et champs quantiques . Série internationale de monographies de physique. Vol. 88. Presse universitaire d’Oxford. ISBN 0-19-506643-X. RCAC 94006306 .
- Ward, JP (1997). Quaternions et nombres de Cayley : algèbre et applications . Académique Kluwer. ISBN 0-7923-4513-4.
- Kantor, IL ; Solodnikov, AS (1989). Les nombres hypercomplexes, une introduction élémentaire aux algèbres . Springer Verlag. ISBN 0-387-96980-2.
- Gürlebeck, Klaus; Sprössig, Wolfgang (1997). Calcul quaternionique et calcul de Clifford pour physiciens et ingénieurs . Méthodes mathématiques en pratique. Vol. 1. Wiley. ISBN 0-471-96200-7. RCAC 98169958 .
- Kuipers, Jack (2002). Quaternions et séquences de rotation : une introduction avec des applications aux orbites, à l’aérospatiale et à la réalité virtuelle . Presse de l’Université de Princeton . ISBN 0-691-10298-8.
- Conway, John Horton ; En ligneSmith, Derek A. (2003). Sur les quaternions et les octonions : leur géométrie, leur arithmétique et leur symétrie . AK Peters. ISBN 1-56881-134-9.( révision ).
- Jack, PM (2003). “L’espace physique en tant que structure de quaternion, I: équations de Maxwell. Une brève note”. arXiv : math-ph/0307038 .
- Kravchenko, Vladislav (2003). Analyse Quaternionique Appliquée . Heldermann Verlag. ISBN 3-88538-228-8.
- Hazewinkel, Michiel ; Gubareni, Nadiya ; En ligneKiritchenko, Vladimir V. (2004). Algèbres, anneaux et modules . Vol. 1. Springer. ISBN 1-4020-2690-0.
- Hanson, Andrew J. (2006). Visualisation des quaternions . Elsevier. ISBN 0-12-088400-3.
- Binz, Ernst; Pods, Sonja (2008). “1. Le champ oblique des quaternions”. Géométrie des groupes de Heisenberg . Société mathématique américaine . ISBN 978-0-8218-4495-3.
- Doran, Chris JL ; En ligneLasenby, Anthony N. (2003). Algèbre géométrique pour les physiciens . La presse de l’Universite de Cambridge. ISBN 978-0-521-48022-2.
- Vince, John A. (2008). Algèbre géométrique pour l’infographie . Springer. ISBN 978-1-84628-996-5.
- Pour les molécules qui peuvent être considérées comme des corps rigides classiques, la simulation informatique de la dynamique moléculaire utilise des quaternions. Ils ont d’abord été introduits à cette fin par Evans, DJ (1977). “Sur la représentation de l’espace d’orientation”. Mol. Phys . 34 (2): 317–325. Bibcode : 1977MolPh..34..317E . doi : 10.1080/00268977700101751 .
- Zhang, Fuzhen (1997). “Quaternions et Matrices de Quaternions” . Algèbre linéaire et ses applications . 251 : 21–57. doi : 10.1016/0024-3795(95)00543-9 .
- Ron Goldman (2010). Repenser les quaternions : théorie et calcul . Morgan et Claypool. ISBN 978-1-60845-420-4.
- Eves, Howard (1976), Une introduction à l’histoire des mathématiques (4e éd.), New York : Holt, Rinehart et Winston , ISBN 0-03-089539-1
Liens et monographies
- “Avis de Quaternion” .Avis et documents liés aux présentations de la conférence Quaternion
- “Quaternion” , Encyclopédie des mathématiques , EMS Press , 2001 [1994]
- “Foire aux questions” . Matrice et Quaternion . 1.21.
- Sweetser, Doug. “Faire de la physique avec des quaternions” .
- Quaternions pour l’infographie et la mécanique (Gernot Hoffman)
- Gsponer, André; Hurni, Jean-Pierre (2002). « L’héritage physique de Sir WR Hamilton ». arXiv : math-ph/0201058 .
- Wilkins, DR “Recherche de Hamilton sur les quaternions” .
- Grossman, David J. “Quaternion Julia Fractals” .Fractales de Quaternion Julia 3D Raytracées
- “Mathématiques et conversions des quaternions” .Grande page expliquant les mathématiques de base avec des liens vers des formules de conversion de rotation simples.
- Mathews, John H. “Bibliographie pour les quaternions” . Archivé de l’original le 2006-09-02.
- “Pouvoirs du quaternion” . GameDev.net.
- Hanson, Andrew. “Visualiser la page d’accueil des Quaternions” . Archivé de l’original le 2006-11-05.
- Karney, Charles FF (janvier 2007). “Quaternions dans la modélisation moléculaire”. J. Mol. Graphique. mod . 25 (5): 595–604. arXiv : physique/0506177 . doi : 10.1016/j.jmgm.2006.04.002 . PMID 16777449 . S2CID 6690718 .
- En ligneMebius, Johan E. (2005). “Une preuve matricielle du théorème de représentation des quaternions pour les rotations à quatre dimensions”. arXiv : math/0501249 .
- En ligneMebius, Johan E. (2007). “Dérivation de la formule d’Euler – Rodrigues pour les rotations tridimensionnelles à partir de la formule générale pour les rotations quadridimensionnelles”. arXiv : math/0701759 .
- “Marche Hamilton” . Département de mathématiques, NUI Maynooth .
- “Utiliser des Quaternions pour représenter la rotation” . OpenGL : Tutoriels . Archivé de l’original le 15/12/2007.
- David Erickson, Recherche et développement pour la défense Canada (RDDC), Dérivation complète de la matrice de rotation à partir de la représentation unitaire des quaternions dans l’article RDDC TR 2005-228.
- Martínez, Alberto. “Mathématiques négatives, comment les règles mathématiques peuvent être positivement pliées” . Département d’histoire, Université du Texas. Archivé de l’original le 2011-09-24.
- Stahlke, D. “Quaternions en mécanique classique” (PDF) .
- Morier-Genoud, Sophie; Ovsienko, Valentin (2008). “Eh bien, papa, pouvez-vous multiplier les triplés?”. arXiv : 0810.5562 [ math.AC ].décrit comment les quaternions peuvent être transformés en une algèbre skew-commutative graduée par Z /2 × Z /2 × Z /2 .
- Joyce, Helen (novembre 2004). “Quaternions curieux” . hébergé par John Baez .
- Ibanez, Luis. “Tutoriel sur les Quaternions. Partie I” (PDF) . Archivé de l’original (PDF) le 2012-02-04 . Récupéré le 05/12/2011 . Partie II (PDF; en utilisant la terminologie de Hamilton, qui diffère de l’usage moderne)
- Ghiloni, R.; Moretti, V.; En lignePerotti, A. (2013). “Calcul fonctionnel de tranche continue dans les espaces de Hilbert quaternioniques”. Rév. Math. Phys . 25 (4): 1350006–126. arXiv : 1207.0666 . Bibcode : 2013RvMaP..2550006G . doi : 10.1142/S0129055X13500062 . S2CID 119651315 .
Ghiloni, R.; Moretti, V.; En lignePerotti, A. (2017). “Représentations spectrales des opérateurs normaux via des mesures valorisées de projection quaternionique entrelacées”. Rév. Math. Phys . 29 : 1750034. arXiv : 1602.02661 . doi : 10.1142/S0129055X17500349 .deux articles explicatifs sur le calcul fonctionnel continu et la théorie spectrale dans les espaces de Hilbert quanternioniques utiles en mécanique quantique quaternionique rigoureuse. - Quaternions l’application Android affiche le quaternion correspondant à l’orientation de l’appareil.
- Rotation d’objets à l’aide de Quaternions article parlant de l’utilisation de Quaternions pour la rotation dans les jeux vidéo/infographie.
Liens externes
| Le Wikibook Associative Composition Algebra a une page sur le thème: Quaternions |
| Wikiquote a des citations liées à Quaternion . |
| Recherchez quaternion dans Wiktionary, le dictionnaire gratuit. |
-
![]()
![]() Médias liés aux quaternions sur Wikimedia Commons
Médias liés aux quaternions sur Wikimedia Commons - Paulson, Lawrence C. Quaternions (Développement de preuves formelles dans Isabelle/HOL, Archive des preuves formelles)
- Quaternions – Visualisation