Sphère de Riemann
En mathématiques , la sphère de Riemann , du nom de Bernhard Riemann , [1] est un modèle du plan complexe étendu : le plan complexe plus un point à l’infini . Ce plan étendu représente les nombres complexes étendus , c’est-à-dire les nombres complexes plus une valeur ∞ {displaystyle infty} 

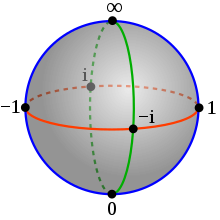 La sphère de Riemann peut être visualisée comme le plan des nombres complexes enroulé autour d’une sphère (par une forme de projection stéréographique – les détails sont donnés ci-dessous).
La sphère de Riemann peut être visualisée comme le plan des nombres complexes enroulé autour d’une sphère (par une forme de projection stéréographique – les détails sont donnés ci-dessous).
Les nombres complexes étendus sont utiles dans l’analyse complexe car ils permettent une division par zéro dans certaines circonstances, d’une manière qui rend des expressions telles que 1 / 0 = ∞ {displaystyle 1/0=infty} 
En géométrie , la sphère de Riemann est l’ exemple prototypique d’ une surface de Riemann , et est l’ une des variétés complexes les plus simples . En géométrie projective , la sphère peut être considérée comme la ligne projective complexe P 1 ( C ) {displaystyle mathbf {P} ^{1}(mathbf {C} )} 

Le plan complexe étendu est aussi appelé plan complexe fermé .
Nombres complexes étendus
Les nombres complexes étendus sont constitués des nombres complexes C {displaystyle mathbf {C} } 

C ^ , C ̄ , or C ∞ . {displaystyle {widehat {mathbf {C} }},quad {overline {mathbf {C} }},quad {text{or}}quad mathbf {C} _{infty} .} 
La notation C ∗ {displaystyle mathbf {C} ^{*}} 

Géométriquement, l’ensemble des nombres complexes étendus est appelé sphère de Riemann (ou plan complexe étendu ).
Opérations arithmétiques
L’addition de nombres complexes peut être étendue en définissant, par z ∈ C {displaystyle zin mathbf {C}} 
z + ∞ = ∞ {displaystyle z+infty =infty} 
pour tout nombre complexe z {displaystyle z} 
z × ∞ = ∞ {displaystyle ztimes infty =infty} 
pour tous les nombres complexes non nuls z {displaystyle z} 


z 0 = ∞ and z ∞ = 0 {displaystyle {frac {z}{0}}=infty quad {text{and}}quad {frac {z}{infty }}=0} 
pour tous les nombres complexes non nuls z {displaystyle z} 



Fonctions rationnelles
Toute fonction rationnelle f ( z ) = g ( z ) / h ( z ) {displaystyle f(z)=g(z)/h(z)} 









L’ensemble des fonctions rationnelles complexes, dont le symbole mathématique est C ( z ) {displaystyle mathbf {C} (z)} 
Par exemple, étant donné la fonction
f ( z ) = 6 z 2 + 1 2 z 2 − 50 {displaystyle f(z)={frac {6z^{2}+1}{2z^{2}-50}}} 
nous pouvons définir f ( ± 5 ) = ∞ {displaystyle f(pm 5)=infty} 




En tant que variété complexe
En tant que variété complexe unidimensionnelle, la sphère de Riemann peut être décrite par deux cartes, toutes deux avec un domaine égal au plan des nombres complexes C {displaystyle mathbf {C} } 


f ( z ) = 1 z {displaystyle f(z)={frac {1}{z}}} 
est appelée la Carte de transition entre les deux copies de C {displaystyle mathbf {C} }
Intuitivement, les cartes de transition indiquent comment coller deux plans ensemble pour former la sphère de Riemann. Les plans sont collés de manière “à l’envers”, de sorte qu’ils se chevauchent presque partout, chaque plan ne contribuant qu’à un point (son origine) manquant de l’autre plan. En d’autres termes, (presque) chaque point de la sphère de Riemann a à la fois un ζ {displaystyle zeta} 


Topologiquement , l’espace résultant est la compactification en un point d’un plan dans la sphère. Cependant, la sphère de Riemann n’est pas simplement une sphère topologique. C’est une sphère avec une structure complexe bien définie , de sorte qu’autour de chaque point de la sphère il y a un voisinage qui peut être identifié biholomorphiquement avec C {displaystyle mathbf {C} }
D’autre part, le théorème d’uniformisation , un résultat central dans la classification des surfaces de Riemann, stipule que toute surface de Riemann simplement connexe est biholomorphe au plan complexe, au plan hyperbolique ou à la sphère de Riemann. Parmi celles-ci, la sphère de Riemann est la seule qui soit une surface fermée (une surface compacte sans frontière ). Par conséquent, la sphère bidimensionnelle admet une structure complexe unique la transformant en une variété complexe unidimensionnelle.
Comme la ligne projective complexe
La sphère de Riemann peut également être définie comme la droite projective complexe . Les points de la droite projective complexe sont des classes d’équivalence établies par la relation suivante sur les points de C 2 ∖ { ( 0 , 0 ) } {displaystyle mathbf {C} ^{2}setminus {(0,0)}} 




Dans ce cas, la classe d’équivalence s’écrit [ w , z ] {style d’affichage [w, z]} ![{displaystyle [w,z]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/35df723ea782005592eef7065e0c2e15cda4b8dc)


![{displaystyle [w,z]thicksim left[1,z/wright]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f6ef485f2fbb96741fae76194d933791b25047cf)
Ce traitement de la sphère de Riemann se connecte le plus facilement à la géométrie projective. Par exemple, toute ligne (ou conique lisse) dans le plan projectif complexe est biholomorphe à la ligne projective complexe. C’est aussi pratique pour étudier les automorphismes de la sphère , plus loin dans cet article.
Comme une sphère
 Projection stéréographique d’un nombre complexe A sur un point α de la sphère de Riemann
Projection stéréographique d’un nombre complexe A sur un point α de la sphère de Riemann
La sphère de Riemann peut être visualisée comme la sphère unité x 2 + y 2 + z 2 = 1 {displaystyle x^{2}+y^{2}+z^{2}=1} 








ζ = x + i y 1 − z = cot ( 1 2 θ ) e i φ . {displaystyle zeta ={frac {x+iy}{1-z}}=cot left({frac {1}{2}}theta right);e^{iphi } .} 
De même, la projection stéréographique de ( 0 , 0 , − 1 ) {displaystyle (0,0,-1)} 

ξ = x − i y 1 + z = tan ( 1 2 θ ) e − i φ . {displaystyle xi ={frac {x-iy}{1+z}}=tan left({frac {1}{2}}theta right);e^{-iphi }.} 
Pour couvrir la sphère unité, il faut les deux projections stéréographiques : la première couvrira toute la sphère sauf le point ( 0 , 0 , 1 ) {displaystyle (0,0,1)}
Les cartes de transition entre ζ {displaystyle zeta} 
Sous ce difféomorphisme, le cercle unitaire dans le ζ {displaystyle zeta} 



Métrique
Une surface de Riemann n’est pas équipée d’une Métrique riemannienne particulière . La structure conforme de la surface de Riemann détermine cependant une classe de métriques : toutes celles dont la structure conforme subordonnée est celle donnée. Plus en détail : La structure complexe de la surface de Riemann détermine de manière unique une métrique jusqu’à l’ Équivalence conforme . (Deux métriques sont dites équivalentes de manière conforme si elles diffèrent par multiplication par une Fonction lisse positive .) Inversement, toute métrique sur une surface orientéedétermine de manière unique une structure complexe, qui ne dépend de la métrique que jusqu’à l’Équivalence conforme. Les structures complexes sur une surface orientée sont donc en correspondance biunivoque avec les classes conformes de métriques sur cette surface.
Dans une classe conforme donnée, on peut utiliser la symétrie conforme pour trouver une métrique représentative avec des propriétés pratiques. En particulier, il existe toujours une métrique complète avec une courbure constante dans une classe conforme donnée.
Dans le cas de la sphère de Riemann, le théorème de Gauss-Bonnet implique qu’une métrique à courbure constante doit avoir une courbure positive K {displaystyle K} 


d s 2 = ( 2 1 + | ζ | 2 ) 2 | d ζ | 2 = 4 ( 1 + ζ ζ ̄ ) 2 d ζ d ζ ̄ . {displaystyle ds^{2}=left({frac {2}{1+|zeta |^{2}}}right)^{2},|dzeta |^{2}= {frac {4}{left(1+zeta {overline {zeta }}right)^{2}}},dzeta ,d{overline {zeta }}.} 
En coordonnées réelles ζ = u + i v {displaystyle zeta =u+iv} 
d s 2 = 4 ( 1 + u 2 + v 2 ) 2 ( d u 2 + d v 2 ) . {displaystyle ds^{2}={frac {4}{left(1+u^{2}+v^{2}right)^{2}}}left(du^{2}+ dv^{2}droite).} 
Jusqu’à un facteur constant, cette métrique est en accord avec la métrique standard de Fubini – Study sur l’espace projectif complexe (dont la sphère de Riemann est un exemple).
Jusqu’à la mise à l’échelle, c’est la seule métrique sur la sphère dont le groupe d’isométries préservant l’orientation est tridimensionnel (et aucun n’est plus que tridimensionnel); ce groupe s’appelle SO ( 3 ) {displaystyle {mbox{SO}}(3)} 

Inversement, laissez S {displaystyle S} 


Automorphismes
 Une transformation de Möbius agissant sur la sphère, et sur le plan par projection stéréographique
Une transformation de Möbius agissant sur la sphère, et sur le plan par projection stéréographique
L’étude de tout objet mathématique est facilitée par la compréhension de son groupe d’automorphismes, c’est-à-dire les cartes de l’objet à lui-même qui préservent la structure essentielle de l’objet. Dans le cas de la sphère de Riemann, un automorphisme est une application conforme inversible (c’est-à-dire une application biholomorphe) de la sphère de Riemann à elle-même. Il s’avère que les seules cartes de ce type sont les transformations de Möbius . Ce sont des fonctions de la forme
f ( ζ ) = a ζ + b c ζ + d , {displaystyle f(zeta )={frac {azeta +b}{czeta +d}},} 
où a {displaystyle a} 




Les transformations de Möbius sont des homographies sur la droite projective complexe. En Coordonnées projectives , la transformation f s’écrit
[ ζ , 1 ] ( a c b d ) = [ a ζ + b , c ζ + d ] = [ a ζ + b c ζ + d , 1 ] = [ f ( ζ ) , 1 ] . {displaystyle [zeta , 1]{begin{pmatrix}a&c\b&dend{pmatrix}} = [azeta +b, czeta +d] = left[{ tfrac {azeta +b}{czeta +d}}, 1right] = [f(zeta ), 1].} ![{displaystyle [zeta , 1]{begin{pmatrix}a&c\b&dend{pmatrix}} = [azeta +b, czeta +d] = left[{tfrac {azeta +b}{czeta +d}}, 1right] = [f(zeta ), 1].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/15daa3dc6b0cede51b0d2722da054b8dea8f0562)
Ainsi, les transformations de Möbius peuvent être décrites comme des matrices complexes deux par deux avec un déterminant non nul . Puisqu’elles agissent sur des Coordonnées projectives, deux matrices donnent la même transformation de Möbius si et seulement si elles diffèrent d’un facteur non nul. Le groupe des transformations de Möbius est le groupe linéaire projectif PGL ( 2 , C ) {displaystyle {mbox{PGL}}(2,mathbf {C} )} 
Si l’on dote la sphère de Riemann de la métrique de Fubini–Study , alors toutes les transformations de Möbius ne sont pas des isométries ; par exemple, les dilatations et les translations ne le sont pas. Les isométries forment un sous-groupe approprié de PGL ( 2 , C ) {displaystyle {mbox{PGL}}(2,mathbf {C} )} 
Applications
En analyse complexe, une fonction méromorphe sur le plan complexe (ou sur n’importe quelle surface de Riemann, d’ailleurs) est un rapport f / g {displaystyle f/g} 



La sphère de Riemann a de nombreuses utilisations en physique. En mécanique quantique, les points sur la ligne projective complexe sont des valeurs naturelles pour les états de polarisation des photons , les états de spin des particules massives de spin 1 / 2 {displaystyle 1/2} 
Voir également
- Géométrie conforme
- Cross-ratio
- Dessin d’enfant
- Infini dirigé
- Théorie du fer à cheval
- Pack Hopf
- Avion de Moebius
- Ligne réelle étendue projectivement
Références
| Apprendre encore plus Cet article cite ses sources mais ne fournit pas de références de pages . ( Septembre 2010 ) You can help to improve it by introducing citations that are more precise. (Learn how and when to remove this template message) |
- ^ B. Riemann: Theorie der Abel’sche Funktionen, J. Math. (Crelle) 1857; Werke 88-144. Le nom est dû à Neumann C :Vorlesungen über Riemanns Theorie der Abelsche Integrale, Leipzig 1865 (Teubner)
- ^ “C^*” . Archivé de l’original le 8 octobre 2021 . Consulté le 12 décembre 2021 .
- ^ William Mark Goldman (1999) Géométrie hyperbolique complexe , page 1, Clarendon Press ISBN 0-19-853793-X
- ^ R. Penrose (2007). La route vers la réalité . Livres anciens. pp. 428–430 (§18.5). ISBN 0-679-77631-1.
- Brown, James et Churchill, Ruel (1989). Variables complexes et applications . New York : McGraw Hill. ISBN 0-07-010905-2.
- Griffiths, Phillip & Harris, Joseph (1978). Principes de géométrie algébrique . John Wiley et fils. ISBN 0-471-32792-1.
- Penrose, Roger (2005). La route vers la réalité . New York : Knopf. ISBN 0-679-45443-8.
- Rudin, Walter (1987). Analyse réelle et complexe . New York : McGraw–Hill. ISBN 0-07-100276-6.
Liens externes
| Wikimedia Commons a des médias liés à la sphère de Riemann . |
- “Sphère de Riemann” , Encyclopedia of Mathematics , EMS Press , 2001 [1994]
- Moebius Transformations Revealed , par Douglas N. Arnold et Jonathan Rogness (une vidéo de deux professeurs de l’Université du Minnesota expliquant et illustrant les transformations de Möbius à l’aide d’une projection stéréographique à partir d’une sphère)