Matrice de covariance
| Apprendre encore plus Cet article peut être trop technique pour que la plupart des lecteurs le comprennent . ( janvier 2022 )Aidez -nous à l’améliorer pour le rendre compréhensible aux non-experts , sans supprimer les détails techniques. (Découvrez comment et quand supprimer ce modèle de message) |
En théorie des probabilités et en statistiques , une matrice de covariance (également appelée matrice d’ auto-covariance , matrice de dispersion , matrice de variance ou matrice variance-covariance ) est une matrice carrée donnant la covariance entre chaque paire d’éléments d’un Vecteur aléatoire donné . Toute matrice de covariance est symétrique et semi-définie positive et sa diagonale principale contient des variances (c’est-à-dire la covariance de chaque élément avec lui-même).
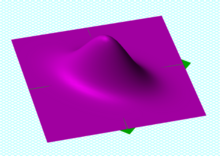 Une fonction de densité de probabilité gaussienne bivariée centrée sur (0, 0), avec une matrice de covariance donnée par [ 1 0,5 0,5 1 ] {displaystyle {begin{bmatrix}1&0.5\0.5&1end{bmatrix}}}
Une fonction de densité de probabilité gaussienne bivariée centrée sur (0, 0), avec une matrice de covariance donnée par [ 1 0,5 0,5 1 ] {displaystyle {begin{bmatrix}1&0.5\0.5&1end{bmatrix}}} 
 Échantillonnez des points à partir d’une Distribution gaussienne bivariée avec un écart type de 3 dans le sens approximatif inférieur gauche-supérieur droit et de 1 dans le sens orthogonal. Étant donné que les composantes x et y co-varient, les variances de X {style d’affichage x}
Échantillonnez des points à partir d’une Distribution gaussienne bivariée avec un écart type de 3 dans le sens approximatif inférieur gauche-supérieur droit et de 1 dans le sens orthogonal. Étant donné que les composantes x et y co-varient, les variances de X {style d’affichage x} 


Intuitivement, la matrice de covariance généralise la notion de variance à plusieurs dimensions. Par exemple, la variation d’une collection de points aléatoires dans un espace à deux dimensions ne peut pas être entièrement caractérisée par un seul nombre, pas plus que les variances dans le X {style d’affichage x}
La matrice de covariance d’un Vecteur aléatoire X {displaystyle mathbf {X} } 


Définition
Tout au long de cet article, en gras sans indice X {displaystyle mathbf {X} } 


Si les entrées du Vecteur colonne
X = ( X 1 , X 2 , . . . , X n ) T {displaystyle mathbf {X} =(X_{1},X_{2},…,X_{n})^{mathrm {T} }} 
sont des variables aléatoires , chacune avec une variance finie et une valeur attendue , alors la matrice de covariance K X X {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }} 
K X i X j = cov [ X i , X j ] = E [ ( X i − E [ X i ] ) ( X j − E [ X j ] ) ] {displaystyle operatorname {K} _{X_{i}X_{j}}=operatorname {cov} [X_{i},X_{j}]=operatorname {E} [(X_{i}- nomopérateur {E} [X_{i}])(X_{j}-nomopérateur {E} [X_{j}])]} ![{displaystyle operatorname {K} _{X_{i}X_{j}}=operatorname {cov} [X_{i},X_{j}]=operatorname {E} [(X_{i}-operatorname {E} [X_{i}])(X_{j}-operatorname {E} [X_{j}])]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/83bec85f5e2cab5d3406677dd806e554a442331f)
où l’opérateur E { style d’affichage nom de l’opérateur {E} } 
Nomenclatures et notations contradictoires
Les nomenclatures diffèrent. Certains statisticiens, à la suite du probabiliste William Feller dans son livre en deux volumes An Introduction to Probability Theory and Its Applications , [2] appellent la matrice K X X {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }}
var ( X ) = cov ( X ) = E [ ( X − E [ X ] ) ( X − E [ X ] ) T ] . {displaystyle operatorname {var} (mathbf {X} )=operatorname {cov} (mathbf {X} )=operatorname {E} left[(mathbf {X} -operatorname {E} [ mathbf {X} ])(mathbf {X} -nomopérateur {E} [mathbf {X} ])^{rm {T}}right].} ![{displaystyle operatorname {var} (mathbf {X} )=operatorname {cov} (mathbf {X} )=operatorname {E} left[(mathbf {X} -operatorname {E} [mathbf {X} ])(mathbf {X} -operatorname {E} [mathbf {X} ])^{rm {T}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cca6689e7e3aad726a5b60052bbd8f704f1b26bf)
Les deux formes sont assez standard et il n’y a pas d’ambiguïté entre elles. La matrice K X X {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }}
Par comparaison, la notation de la matrice de covariance croisée entre deux vecteurs est
cov ( X , Y ) = K X Y = E [ ( X − E [ X ] ) ( Y − E [ Y ] ) T ] . {displaystyle operatorname {cov} (mathbf {X} ,mathbf {Y} )=operatorname {K} _{mathbf {X} mathbf {Y} }=operatorname {E} left[( mathbf {X} -nomopérateur {E} [mathbf {X} ])(mathbf {Y} -nomopérateur {E} [mathbf {Y} ])^{rm {T}}right] .} ![{displaystyle operatorname {cov} (mathbf {X} ,mathbf {Y} )=operatorname {K} _{mathbf {X} mathbf {Y} }=operatorname {E} left[(mathbf {X} -operatorname {E} [mathbf {X} ])(mathbf {Y} -operatorname {E} [mathbf {Y} ])^{rm {T}}right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1112b836c2cd9fde4ac076a44dfdbd213395a56b)
Propriétés
Relation avec la Matrice d’autocorrélation
La matrice d’auto-covariance K X X {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }} 
K X X = E [ ( X − E [ X ] ) ( X − E [ X ] ) T ] = R X X − E [ X ] E [ X ] T {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }=operatorname {E} [(mathbf {X} -operatorname {E} [mathbf {X} ])( mathbf {X} -nomopérateur {E} [mathbf {X} ])^{rm {T}}]=nomopérateur{R} _{mathbf {X} mathbf {X} }-nomopérateur { E} [mathbf {X} ]nomopérateur {E} [mathbf {X} ]^{rm {T}}} ![{displaystyle operatorname {K} _{mathbf {X} mathbf {X} }=operatorname {E} [(mathbf {X} -operatorname {E} [mathbf {X} ])(mathbf {X} -operatorname {E} [mathbf {X} ])^{rm {T}}]=operatorname {R} _{mathbf {X} mathbf {X} }-operatorname {E} [mathbf {X} ]operatorname {E} [mathbf {X} ]^{rm {T}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/00175de2c055b834a6f012910f7a5a3d1ed96353)
où la Matrice d’autocorrélation est définie comme R X X = E [ X X T ] {displaystyle operatorname {R} _{mathbf {X} mathbf {X} }=operatorname {E} [mathbf {X} mathbf {X} ^{rm {T}}]} ![{displaystyle operatorname {R} _{mathbf {X} mathbf {X} }=operatorname {E} [mathbf {X} mathbf {X} ^{rm {T}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/375369663d22bba80d770f6374289f95dd22cf63)
Relation avec la Matrice de corrélation
Une entité étroitement liée à la matrice de covariance est la matrice des coefficients de corrélation produit-moment de Pearson entre chacune des variables aléatoires du Vecteur aléatoire. X {displaystyle mathbf {X} }
corr ( X ) = ( diag ( K X X ) ) − 1 2 K X X ( diag ( K X X ) ) − 1 2 , {displaystyle operatorname {corr} (mathbf {X} )={big (}operatorname {diag} (operatorname {K} _{mathbf {X} mathbf {X} }){big) }^{-{frac {1}{2}}},operatorname {K} _{mathbf {X} mathbf {X} },{big (}operatorname {diag} (operatorname {K} _{mathbf {X} mathbf {X} }){big )}^{-{frac {1}{2}}},} 
où diag ( K X X ) {displaystyle operatorname {diag} (operatorname {K} _{mathbf {X} mathbf {X} })} 

De manière équivalente, la Matrice de corrélation peut être vue comme la matrice de covariance des variables aléatoires standardisées X i / σ ( X i ) {displaystyle X_{i}/sigma (X_{i})} 
corr ( X ) = [ 1 E [ ( X 1 − μ 1 ) ( X 2 − μ 2 ) ] σ ( X 1 ) σ ( X 2 ) ⋯ E [ ( X 1 − μ 1 ) ( X n − μ n ) ] σ ( X 1 ) σ ( X n ) E [ ( X 2 − μ 2 ) ( X 1 − μ 1 ) ] σ ( X 2 ) σ ( X 1 ) 1 ⋯ E [ ( X 2 − μ 2 ) ( X n − μ n ) ] σ ( X 2 ) σ ( X n ) ⋮ ⋮ ⋱ ⋮ E [ ( X n − μ n ) ( X 1 − μ 1 ) ] σ ( X n ) σ ( X 1 ) E [ ( X n − μ n ) ( X 2 − μ 2 ) ] σ ( X n ) σ ( X 2 ) ⋯ 1 ] . {displaystyle operatorname {corr} (mathbf {X} )={begin{bmatrix}1&{frac {operatorname {E} [(X_{1}-mu _{1})(X_{2}-mu _{2})]}{sigma (X_{1})sigma (X_{2})}}&cdots &{frac {operatorname {E} [(X_{1}-mu _{1})(X_{n}-mu _{n})]}{sigma (X_{1})sigma (X_{n})}}\\{frac {operatorname {E} [(X_{2}-mu _{2})(X_{1}-mu _{1})]}{sigma (X_{2})sigma (X_{1})}}&1&cdots &{frac {operatorname {E} [(X_{2}-mu _{2})(X_{n}-mu _{n})]}{sigma (X_{2})sigma (X_{n})}}\\vdots &vdots &ddots &vdots \\{frac {operatorname {E} [(X_{n}-mu _{n})(X_{1}-mu _{1})]}{sigma (X_{n})sigma (X_{1})}}&{frac {operatorname {E} [(X_{n}-mu _{n})(X_{2}-mu _{2})]}{sigma (X_{n})sigma (X_{2})}}&cdots &1end{bmatrix}}.} ![{displaystyle operatorname {corr} (mathbf {X} )={begin{bmatrix}1&{frac {operatorname {E} [(X_{1}-mu _{1})(X_{2}-mu _{2})]}{sigma (X_{1})sigma (X_{2})}}&cdots &{frac {operatorname {E} [(X_{1}-mu _{1})(X_{n}-mu _{n})]}{sigma (X_{1})sigma (X_{n})}}\\{frac {operatorname {E} [(X_{2}-mu _{2})(X_{1}-mu _{1})]}{sigma (X_{2})sigma (X_{1})}}&1&cdots &{frac {operatorname {E} [(X_{2}-mu _{2})(X_{n}-mu _{n})]}{sigma (X_{2})sigma (X_{n})}}\\vdots &vdots &ddots &vdots \\{frac {operatorname {E} [(X_{n}-mu _{n})(X_{1}-mu _{1})]}{sigma (X_{n})sigma (X_{1})}}&{frac {operatorname {E} [(X_{n}-mu _{n})(X_{2}-mu _{2})]}{sigma (X_{n})sigma (X_{2})}}&cdots &1end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/df091a047aa8a9d829b25f68a5bbe6d56938b146)
Chaque élément sur la diagonale principale d’une Matrice de corrélation est la corrélation d’une variable aléatoire avec elle-même, qui est toujours égale à 1. Chaque Élément hors diagonale est compris entre -1 et +1 inclus.
Inverse de la matrice de covariance
L’inverse de cette matrice, K X X − 1 {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }^{-1}} 
Propriétés de base
Pour K X X = var ( X ) = E [ ( X − E [ X ] ) ( X − E [ X ] ) T ] {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }=operatorname {var} (mathbf {X} )=operatorname {E} left[left(mathbf {X } -nomopérateur {E} [mathbf {X} ]right)left(mathbf {X} -nomopérateur {E} [mathbf {X} ]right)^{rm {T}} à droite]} ![{displaystyle operatorname {K} _{mathbf {X} mathbf {X} }=operatorname {var} (mathbf {X} )=operatorname {E} left[left(mathbf {X} -operatorname {E} [mathbf {X} ]right)left(mathbf {X} -operatorname {E} [mathbf {X} ]right)^{rm {T}}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bed55fb51d1aad5b83b37076bdbd9ad0177a813b)
![{displaystyle mathbf {mu _{X}} =operatorname {E} [{textbf {X}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/25987aa171cbd6ec023a92eb06b6ee750de39309)


- K X X = E ( X X T ) − μ X μ X T {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }=operatorname {E} (mathbf {XX^{rm {T}}})-mathbf {mu _{ X}} mathbf {mu _{X}} ^{rm {T}}}
- K X X {displaystyle operatorname {K} _{mathbf {X} mathbf {X} },}
est semi-défini positif , c’est-à-dire a T K X X a ≥ 0 for all a ∈ R n {displaystyle mathbf {a} ^{T}operatorname {K} _{mathbf {X} mathbf {X} }mathbf {a} geq 0quad {text{for all}}mathbf {a} in mathbb {R} ^{n}}
- K X X {displaystyle operatorname {K} _{mathbf {X} mathbf {X} },}
est symétrique , c’est-à-dire K X X T = K X X {displaystyle operatorname {K} _{mathbf {X} mathbf {X} }^{rm {T}}=operatorname {K} _{mathbf {X} mathbf {X} }}
- Pour toute constante (c’est-à-dire non aléatoire) m × n {displaystyle mfois n}
matrice A {displaystyle mathbf {A}}
et constante m × 1 {displaystyle mfois 1}
vecteur a {displaystyle mathbf {a} }
, on a var ( A X + a ) = A var ( X ) A T {displaystyle operatorname {var} (mathbf {AX} +mathbf {a} )=mathbf {A} ,operatorname {var} (mathbf {X} ),mathbf {A} ^{ rm{T}}}
- Si Y {displaystyle mathbf {Y}}
est un autre Vecteur aléatoire de même dimension que X {displaystyle mathbf {X} }
, alors var ( X + Y ) = var ( X ) + cov ( X , Y ) + cov ( Y , X ) + var ( Y ) {displaystyle operatorname {var} (mathbf {X} +mathbf {Y} )=operatorname {var} (mathbf {X} )+operatorname {cov} (mathbf {X} ,mathbf { Y} )+nomopérateur {cov} (mathbf {Y} ,mathbf {X} )+nomopérateur {var} (mathbf {Y} )}
où cov ( X , Y ) {displaystyle operatorname {cov} (mathbf {X} ,mathbf {Y} )}
est la matrice de covariance croisée de X {displaystyle mathbf {X} }
et Y {displaystyle mathbf {Y}}
.










Matrices de blocs
La moyenne commune μ {displaystyle mathbf {mu } } 

μ = [ μ X μ Y ] , Σ = [ K X X K X Y K Y X K Y Y ] {displaystyle mathbf {mu } ={begin{bmatrix}mathbf {mu _{X}} \mathbf {mu _{Y}} end{bmatrix}},qquad mathbf { Sigma } ={begin{bmatrix}nomopérateur{K} _{mathbf {XX} }&nomopérateur{K} _{mathbf {XY} }\nomopérateur{K} _{mathbf {YX } }&nomopérateur {K} _{mathbf {YY} }end{bmatrix}}} 
où K X X = var ( X ) {displaystyle operatorname {K} _{mathbf {XX} }=operatorname {var} (mathbf {X} )} 


K X X {displaystyle operatorname {K} _{mathbf {XX} }} 

Si X {displaystyle mathbf {X} }
X , Y ∼ N ( μ , Σ ) , {displaystyle mathbf {X} ,mathbf {Y} sim {mathcal {N}}(mathbf {mu } ,operatorname {mathbf {Sigma} } ),} 
alors la Distribution conditionnelle pour Y {displaystyle mathbf {Y}}
Y ∣ X ∼ N ( μ Y | X , K Y | X ) , {displaystyle mathbf {Y} mid mathbf {X} sim {mathcal {N}}(mathbf {mu _{Y|X}} ,operatorname {K} _{mathbf {Y |X} }),} 
défini par Moyenne conditionnelle
μ Y | X = μ Y + K Y X K X X − 1 ( X − μ X ) {displaystyle mathbf {mu _{Y|X}} =mathbf {mu _{Y}} +operatorname {K} _{mathbf {YX} }operatorname {K} _{mathbf { XX} }^{-1}left(mathbf {X} -mathbf {mu _{X}} right)} 
et variance conditionnelle
K Y | X = K Y Y − K Y X K X X − 1 K X Y . {displaystyle operatorname {K} _{mathbf {Y|X} }=operatorname {K} _{mathbf {YY} }-operatorname {K} _{mathbf {YX} }operatorname {K} } _{mathbf {XX} }^{-1}nomopérateur {K} _{mathbf {XY} }.} 
La matrice K Y X K X X − 1 {displaystyle operatorname {K} _{mathbf {YX} }operatorname {K} _{mathbf {XX} }^{-1}} 

La matrice des coefficients de régression peut souvent être donnée sous forme transposée, K X X − 1 K X Y {displaystyle operatorname {K} _{mathbf {XX} }^{-1}operatorname {K} _{mathbf {XY} }} 

Matrice de covariance partielle
Une matrice de covariance avec tous les éléments non nuls nous indique que toutes les variables aléatoires individuelles sont interdépendantes. Cela signifie que les variables ne sont pas seulement directement corrélées, mais également corrélées indirectement via d’autres variables. Souvent, ces corrélations indirectes de mode commun sont triviales et sans intérêt. Ils peuvent être supprimés en calculant la matrice de covariance partielle, c’est-à-dire la partie de la matrice de covariance qui ne montre que la partie intéressante des corrélations.
Si deux vecteurs de variables aléatoires X {displaystyle mathbf {X} } 
K X Y ∣ I = pcov ( X , Y ∣ I ) = cov ( X , Y ) − cov ( X , I ) cov ( I , I ) − 1 cov ( I , Y ) . {displaystyle operatorname {K} _{mathbf {XYmid I} }=operatorname {pcov} (mathbf {X} ,mathbf {Y} mid mathbf {I} )=operatorname {cov } (mathbf {X} ,mathbf {Y} )-nomopérateur {cov} (mathbf {X} ,mathbf {I} )nomopérateur {cov} (mathbf {I} ,mathbf {I} )^{-1}nomopérateur {cov} (mathbf {I} ,mathbf {Y} ).} 
La matrice de covariance partielle K X Y ∣ I {displaystyle operatorname {K} _{mathbf {XYmid I} }} 

Matrice de covariance comme paramètre d’une distribution
Si un Vecteur colonne X {displaystyle mathbf {X} } 
f ( X ) = ( 2 π ) − n / 2 | Σ | − 1 / 2 exp ( − 1 2 ( X − μ ) T Σ − 1 ( X − μ ) ) , {displaystyle operatorname {f} (mathbf {X} )=(2pi )^{-n/2}|mathbf {Sigma} |^{-1/2}exp left(-{ tfrac {1}{2}}mathbf {(X-mu )^{rm {T}}Sigma ^{-1}(X-mu )} right),} 
où μ = E [ X ] {displaystyle mathbf {mu =nomopérateur {E} [X]} } ![{displaystyle mathbf {mu =operatorname {E} [X]} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/d9c821aa85a1cbc2edfffb9343c51c7cd3541b34)

Matrice de covariance en tant qu’opérateur linéaire
Appliquée à un vecteur, la matrice de covariance mappe une combinaison linéaire c des variables aléatoires X sur un vecteur de covariances avec ces variables : c T Σ = cov ( c T X , X ) {displaystyle mathbf {c} ^{rm {T}}Sigma =operatorname {cov} (mathbf {c} ^{rm {T}}mathbf {X} ,mathbf {X}) } 


De même, la matrice de covariance (pseudo-) inverse fournit un produit interne ⟨ c − μ | Σ + | c − μ ⟩ {displaystyle langle c-mu |Sigma ^{+}|c-mu rangle } 
Quelles matrices sont des matrices de covariance ?
De l’identité juste au-dessus, soit b {displaystyle mathbf {b} } 

var ( b T X ) = b T var ( X ) b , {displaystyle operatorname {var} (mathbf {b} ^{rm {T}}mathbf {X} )=mathbf {b} ^{rm {T}}operatorname {var} (mathbf {X} )mathbf {b} ,,} 
qui doit toujours être non négatif, puisqu’il s’agit de la variance d’une variable aléatoire à valeur réelle, donc une matrice de covariance est toujours une Matrice semi-définie positive .
L’argument ci-dessus peut être développé comme suit :
w T E [ ( X − E [ X ] ) ( X − E [ X ] ) T ] w = E [ w T ( X − E [ X ] ) ( X − E [ X ] ) T w ] = E [ ( w T ( X − E [ X ] ) ) 2 ] ≥ 0 , {displaystyle {begin{aligned}&w^{rm {T}}operatorname {E} left[(mathbf {X} -operatorname {E} [mathbf {X} ])(mathbf { X} -nomopérateur {E} [mathbf {X} ])^{rm {T}}right]w=nomopérateur{E} left[w^{rm {T}}(mathbf { X} -nomopérateur {E} [mathbf {X} ])(mathbf {X} -nomopérateur {E} [mathbf {X} ])^{rm {T}}wdroite]\ &=nomopérateur {E} {big [}{big (}w^{rm {T}}(mathbf {X} -nomopérateur {E} [mathbf {X} ]){big) }^{2}{big ]}geq 0,end{aligné}}} ![{displaystyle {begin{aligned}&w^{rm {T}}operatorname {E} left[(mathbf {X} -operatorname {E} [mathbf {X} ])(mathbf {X} -operatorname {E} [mathbf {X} ])^{rm {T}}right]w=operatorname {E} left[w^{rm {T}}(mathbf {X} -operatorname {E} [mathbf {X} ])(mathbf {X} -operatorname {E} [mathbf {X} ])^{rm {T}}wright]\&=operatorname {E} {big [}{big (}w^{rm {T}}(mathbf {X} -operatorname {E} [mathbf {X} ]){big )}^{2}{big ]}geq 0,end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4c9fb5265a1f97a7cc67b23c9942182f63051a73)
![{displaystyle w^{rm {T}}(mathbf {X} -operatorname {E} [mathbf {X} ])}](https://wikimedia.org/api/rest_v1/media/math/render/svg/127bb7293f5d9738d76b0c9461d4236befd8dccb)
Inversement, toute Matrice semi-définie positive symétrique est une matrice de covariance. Pour voir cela, supposons M {displaystyle M} 


var ( M 1 / 2 X ) = M 1 / 2 var ( X ) M 1 / 2 = M . {displaystyle operatorname {var} (mathbf {M} ^{1/2}mathbf {X} )=mathbf {M} ^{1/2},operatorname {var} (mathbf {X} } ),mathbf {M} ^{1/2}=mathbf {M} .} 
Vecteurs aléatoires complexes
La variance d’une variable aléatoire à valeur scalaire complexe avec une valeur attendue μ {displaystylemu} 
var ( Z ) = E [ ( Z − μ Z ) ( Z − μ Z ) ̄ ] , {displaystyle operatorname {var} (Z)=operatorname {E} left[(Z-mu _{Z}){overline {(Z-mu _{Z})}}right], } ![{displaystyle operatorname {var} (Z)=operatorname {E} left[(Z-mu _{Z}){overline {(Z-mu _{Z})}}right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b3a3d7abfa56fdb689ebd3c01388715ad4773d4a)
où le conjugué complexe d’un nombre complexe z {displaystyle z} 

Si Z = ( Z 1 , … , Z n ) T { displaystyle mathbf {Z} = (Z_ {1}, ldots, Z_ {n}) ^ { mathrm {T} }} 

K Z Z = cov [ Z , Z ] = E [ ( Z − μ Z ) ( Z − μ Z ) H ] {displaystyle operatorname {K} _{mathbf {Z} mathbf {Z} }=operatorname {cov} [mathbf {Z} ,mathbf {Z} ]=operatorname {E} left[( mathbf {Z} -mathbf {mu _{Z}} )(mathbf {Z} -mathbf {mu _{Z}} )^{mathrm {H} }right]} ![{displaystyle operatorname {K} _{mathbf {Z} mathbf {Z} }=operatorname {cov} [mathbf {Z} ,mathbf {Z} ]=operatorname {E} left[(mathbf {Z} -mathbf {mu _{Z}} )(mathbf {Z} -mathbf {mu _{Z}} )^{mathrm {H} }right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/88c60e556c5e5f705d6448f79339174ec62b1ffd)
La matrice ainsi obtenue sera hermitienne positive semi-définie , [8] avec des nombres réels dans la diagonale principale et des nombres complexes hors diagonale.
Propriétés
- La matrice de covariance est une matrice hermitienne , c’est-à-dire K Z Z H = K Z Z {displaystyle operatorname {K} _{mathbf {Z} mathbf {Z} }^{mathrm {H} }=operatorname {K} _{mathbf {Z} mathbf {Z} }}
. [1] : p. 179
- Les éléments diagonaux de la matrice de covariance sont réels. [1] : p. 179

Matrice de pseudo-covariance
Pour les vecteurs aléatoires complexes, un autre type de deuxième moment central, la matrice de pseudo-covariance (également appelée matrice de relation ) est définie comme suit :
J Z Z = cov [ Z , Z ̄ ] = E [ ( Z − μ Z ) ( Z − μ Z ) T ] {displaystyle operatorname {J} _{mathbf {Z} mathbf {Z} }=operatorname {cov} [mathbf {Z} ,{overline {mathbf {Z} }}]=operatorname { E} left[(mathbf {Z} -mathbf {mu _{Z}} )(mathbf {Z} -mathbf {mu _{Z}} )^{mathrm {T} } à droite]} ![{displaystyle operatorname {J} _{mathbf {Z} mathbf {Z} }=operatorname {cov} [mathbf {Z} ,{overline {mathbf {Z} }}]=operatorname {E} left[(mathbf {Z} -mathbf {mu _{Z}} )(mathbf {Z} -mathbf {mu _{Z}} )^{mathrm {T} }right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bba62bd04d95107abdaa72eb5b505496ad4151ea)
Contrairement à la matrice de covariance définie ci-dessus, la transposition hermitienne est remplacée par la transposition dans la définition. Ses éléments diagonaux peuvent avoir des valeurs complexes ; c’est une Matrice symétrique complexe .
Estimation
Si M X {displaystyle mathbf {M} _{mathbf {X} }} 





Q X X = 1 n − 1 M X M X T , Q X Y = 1 n − 1 M X M Y T {displaystyle mathbf {Q} _{mathbf {XX} }={frac {1}{n-1}}mathbf {M} _{mathbf {X} }mathbf {M} _{ mathbf {X} }^{rm {T}},qquad mathbf {Q} _{mathbf {XY} }={frac {1}{n-1}}mathbf {M} _{ mathbf {X} }mathbf {M} _{mathbf {Y} }^{rm {T}}} 
ou, si les moyennes des lignes étaient connues a priori,
Q X X = 1 n M X M X T , Q X Y = 1 n M X M Y T . {displaystyle mathbf {Q} _{mathbf {XX} }={frac {1}{n}}mathbf {M} _{mathbf {X} }mathbf {M} _{mathbf { X} }^{rm {T}},qquad mathbf {Q} _{mathbf {XY} }={frac {1}{n}}mathbf {M} _{mathbf {X} }mathbf {M} _{mathbf {Y} }^{rm {T}}.} 
Ces matrices de covariance d’échantillon empiriques sont les estimateurs les plus simples et les plus souvent utilisés pour les matrices de covariance, mais d’autres estimateurs existent également, y compris des estimateurs régularisés ou de rétrécissement, qui peuvent avoir de meilleures propriétés.
Applications
La matrice de covariance est un outil utile dans de nombreux domaines différents. On peut en déduire une matrice de transformation , appelée transformation de blanchiment , qui permet de décorréler complètement les données [ citation nécessaire ] ou, d’un point de vue différent, de trouver une base optimale pour représenter les données de manière compacte [ citation nécessaire ] (voir quotient de Rayleigh pour une preuve formelle et des propriétés supplémentaires des matrices de covariance). C’est ce qu’on appelle l’analyse en composantes principales (ACP) et la Transformée de Karhunen-Loève (transformée KL).
La matrice de covariance joue un rôle clé en économie financière , en particulier dans la théorie du portefeuille et son théorème de séparation des fonds communs de placement et dans le modèle d’ évaluation des actifs financiers . La matrice des covariances entre les rendements de divers actifs est utilisée pour déterminer, sous certaines hypothèses, les montants relatifs des différents actifs que les investisseurs devraient (dans une analyse normative ) ou devraient (dans une analyse positive ) choisir de détenir dans un contexte de diversification .
Cartographie des covariances
Dans la cartographie de covariance, les valeurs des cov ( X , Y ) {displaystyle operatorname {cov} (mathbf {X} ,mathbf {Y} )} 

En pratique les vecteurs colonnes X , Y {displaystyle mathbf {X} ,mathbf {Y} } 
[ X 1 , X 2 , . . . X n ] = [ X 1 ( t 1 ) X 2 ( t 1 ) ⋯ X n ( t 1 ) X 1 ( t 2 ) X 2 ( t 2 ) ⋯ X n ( t 2 ) ⋮ ⋮ ⋱ ⋮ X 1 ( t m ) X 2 ( t m ) ⋯ X n ( t m ) ] , {displaystyle [mathbf {X} _{1},mathbf {X} _{2},…mathbf {X} _{n}]={begin{bmatrix}X_{1}(t_ {1})&X_{2}(t_{1})&cdots &X_{n}(t_{1})\\X_{1}(t_{2})&X_{2}(t_{2} )&cdots &X_{n}(t_{2})\\vdots &vdots &ddots &vdots \\X_{1}(t_{m})&X_{2}(t_{ m})&cdots &X_{n}(t_{m})end{bmatrice}},} ![{displaystyle [mathbf {X} _{1},mathbf {X} _{2},...mathbf {X} _{n}]={begin{bmatrix}X_{1}(t_{1})&X_{2}(t_{1})&cdots &X_{n}(t_{1})\\X_{1}(t_{2})&X_{2}(t_{2})&cdots &X_{n}(t_{2})\\vdots &vdots &ddots &vdots \\X_{1}(t_{m})&X_{2}(t_{m})&cdots &X_{n}(t_{m})end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/be824f93648e01daa17bd4e9d99b4398026b0149)
où X j ( t i ) {displaystyle X_{j}(t_{i})} 

⟨ X ⟩ = 1 n ∑ j = 1 n X j {displaystyle langle mathbf {X} rangle ={frac {1}{n}}sum _{j=1}^{n}mathbf {X} _{j}} 
et la matrice de covariance est estimée par la matrice de covariance d’échantillon
cov ( X , Y ) ≈ ⟨ X Y T ⟩ − ⟨ X ⟩ ⟨ Y T ⟩ , {displaystyle operatorname {cov} (mathbf {X} ,mathbf {Y} )approx langle mathbf {XY^{rm {T}}} rangle -langle mathbf {X} rangle langle mathbf {Y} ^{rm {T}}rangle ,} 
où les crochets angulaires indiquent la Moyenne de l’échantillon comme avant, sauf que la correction de Bessel doit être effectuée pour éviter les biais . En utilisant cette estimation, la matrice de covariance partielle peut être calculée comme
pcov ( X , Y ∣ I ) = cov ( X , Y ) − cov ( X , I ) ( cov ( I , I ) ∖ cov ( I , Y ) ) , {displaystyle operatorname {pcov} (mathbf {X} ,mathbf {Y} mid mathbf {I} )=operatorname {cov} (mathbf {X} ,mathbf {Y} )-operatorname {cov} (mathbf {X} ,mathbf {I} )left(operatorname {cov} (mathbf {I} ,mathbf {I} )backslash operatorname {cov} (mathbf {I} ,mathbf {Y} )right),} 
où la barre oblique inverse désigne l’ opérateur de division de matrice gauche , qui contourne l’obligation d’inverser une matrice et est disponible dans certains packages de calcul tels que Matlab . [9]
 Figure 1 : Construction d’une carte de covariance partielle de molécules de N 2 subissant une explosion coulombienne induite par un laser à électrons libres. [10] Les panneaux a et b cartographient les deux termes de la matrice de covariance, qui est présentée dans le panneau c . Le panneau d cartographie les corrélations de mode commun via les fluctuations d’intensité du laser. Le panneau e cartographie la matrice de covariance partielle qui est corrigée des fluctuations d’intensité. Panneau fmontre qu’une surcorrection de 10 % améliore la carte et rend les corrélations ion-ion clairement visibles. En raison de la conservation de la quantité de mouvement, ces corrélations apparaissent sous forme de lignes approximativement perpendiculaires à la ligne d’autocorrélation (et aux modulations périodiques qui sont provoquées par la sonnerie du détecteur).
Figure 1 : Construction d’une carte de covariance partielle de molécules de N 2 subissant une explosion coulombienne induite par un laser à électrons libres. [10] Les panneaux a et b cartographient les deux termes de la matrice de covariance, qui est présentée dans le panneau c . Le panneau d cartographie les corrélations de mode commun via les fluctuations d’intensité du laser. Le panneau e cartographie la matrice de covariance partielle qui est corrigée des fluctuations d’intensité. Panneau fmontre qu’une surcorrection de 10 % améliore la carte et rend les corrélations ion-ion clairement visibles. En raison de la conservation de la quantité de mouvement, ces corrélations apparaissent sous forme de lignes approximativement perpendiculaires à la ligne d’autocorrélation (et aux modulations périodiques qui sont provoquées par la sonnerie du détecteur).
La figure 1 illustre comment une carte de covariance partielle est construite sur un exemple d’expérience réalisée au laser à électrons libres FLASH à Hambourg. [10] La Fonction aléatoire X ( t ) {displaystyle X(t)} 




Dans l’exemple de la Fig. 1 spectres X j ( t ) {displaystyle mathbf {X} _{j}(t)} 




Spectroscopie infrarouge bidimensionnelle
La spectroscopie infrarouge bidimensionnelle utilise une analyse de corrélation pour obtenir des spectres 2D de la phase condensée . Il existe deux versions de cette analyse : synchrone et asynchrone . Mathématiquement, le premier est exprimé en termes de matrice de covariance d’échantillon et la technique est équivalente à la cartographie de covariance. [11]
Voir également
- Statistiques multivariées
- Répartition de Lewandowski-Kurowicka-Joe
- Matrice de Gramian
- Décomposition des Valeurs propres
- Forme quadratique (statistiques)
- Composants principaux
Références
- ^ un bc Park, Kun Il (2018) . Principes fondamentaux des probabilités et des processus stochastiques avec des applications aux communications . Springer. ISBN 978-3-319-68074-3.
- ^ Guillaume Feller (1971). Introduction à la théorie des probabilités et à ses applications . Wiley. ISBN 978-0-471-25709-7. Récupéré le 10 août 2012 .
- ^ Wasserman, Larry (2004). Toutes les statistiques : un cours concis sur l’inférence statistique . ISBN 0-387-40272-1.
- ^ Taboga, Marco (2010). “Conférences sur la théorie des probabilités et les statistiques mathématiques” .
- ^ Eaton, Morris L. (1983). Statistiques multivariées : une approche par espace vectoriel . John Wiley et fils. p. 116–117. ISBN 0-471-02776-6.
- ^ un b WJ Krzanowski “Principes d’Analyse Multivariée” (Oxford University Press, New York, 1988), Chap. 14.4 ; KV Mardia, JT Kent et JM Bibby “Analyse multivariée (Academic Press, Londres, 1997), Chap. 6.5.3; TW Anderson “An Introduction to Multivariate Statistical Analysis” (Wiley, New York, 2003), 3e éd., Chaps 2.5.1 et 4.3.1.
- ^ Lapidoth, Amos (2009). Une fondation en communication numérique . La presse de l’Universite de Cambridge. ISBN 978-0-521-19395-5.
- ^ Brookes, Mike. « Le manuel de référence de la matrice » . {{cite journal}}: Cite journal requires |journal= (help)
- ^ LJ Frasinski “Techniques de cartographie de covariance” J. Phys. Chauve souris. Mol. Opter. Phys. 49 152004 (2016), accès libre
- ^ a b O Kornilov, M Eckstein, M Rosenblatt, CP Schulz, K Motomura, A Rouzée, J Klei, L Foucar, M Siano, A Lübcke, F. Schapper, P Johnsson, DMP Holland, T Schlatholter, T Marchenko, S Düsterer, K Ueda, MJJ Vrakking et LJ Frasinski “Explosion coulombienne de molécules diatomiques dans des champs XUV intenses cartographiés par covariance partielle” J. Phys. Chauve souris. Mol. Opter. Phys. 46 164028 (2013), accès libre
- ^ I Noda “Méthode de corrélation bidimensionnelle généralisée applicable à l’infrarouge, Raman et à d’autres types de spectroscopie” Appl. Spectrosc. 47 1329–36 (1993)
Lectures complémentaires
- “Matrice de covariance” , Encyclopedia of Mathematics , EMS Press , 2001 [1994]
- Weisstein, Eric W. “Matrice de covariance” . MathWorld .
- van Kampen, NG (1981). Processus stochastiques en physique et chimie . New York : Hollande du Nord. ISBN 0-444-86200-5.