Lasso (statistiques)
Dans les statistiques et l’apprentissage automatique , le lasso ( moins absolu de retrait et opérateur de sélection ; également Lasso ou LASSO ) est une méthode d’ analyse de régression qui effectue à la fois la sélection et la régularisation des variables afin d’améliorer la précision de la prédiction et l’interprétabilité du modèle statistique résultant . Il a été initialement introduit en géophysique , [1] et plus tard par Robert Tibshirani , [2] qui a inventé le terme.
Lasso a été formulé à l’origine pour les modèles de régression linéaire . Ce cas simple en dit long sur l’estimateur. Il s’agit notamment de sa relation avec la régression de crête et la meilleure sélection de sous-ensembles et les liens entre les estimations de coefficients au lasso et ce que l’on appelle le seuillage souple. Il révèle également que (comme la régression linéaire standard) les estimations des coefficients n’ont pas besoin d’être uniques si les covariables sont colinéaires .
Bien qu’initialement définie pour la régression linéaire, la régularisation au lasso est facilement étendue à d’autres modèles statistiques, notamment les modèles linéaires généralisés , les équations d’estimation généralisées , les modèles à risques proportionnels et les estimateurs M . [2] [3] La capacité de Lasso à effectuer une sélection de sous-ensembles repose sur la forme de la contrainte et a une variété d’interprétations, notamment en termes de géométrie , de statistiques bayésiennes et d’ analyse convexe .
Le LASSO est étroitement lié au débruitage de poursuite de base .
Motivation
Lasso a été introduit afin d’améliorer la précision des prédictions et l’interprétabilité des modèles de régression. Il sélectionne un ensemble réduit de covariables connues à utiliser dans un modèle. [2] [1]
Histoire
Lasso a été développé indépendamment dans la littérature géophysique en 1986, sur la base de travaux antérieurs qui utilisaient le l 1 {displaystyle ell ^{1}} 
Avant le lasso, la méthode la plus largement utilisée pour choisir les covariables était la sélection par étapes . Cette approche n’améliore la précision de la prédiction que dans certains cas, par exemple lorsque seules quelques covariables ont une forte relation avec le résultat. Cependant, dans d’autres cas, cela peut augmenter l’erreur de prédiction.
À l’époque, la régression de crête était la technique la plus populaire pour améliorer la précision des prévisions. La régression Ridge améliore l’erreur de prédiction en réduisant la somme des carrés des Coefficients de régression pour qu’elle soit inférieure à une valeur fixe afin de réduire le surajustement , mais elle n’effectue pas de sélection de covariables et n’aide donc pas à rendre le modèle plus interprétable.
Lasso atteint ces deux objectifs en forçant la somme de la valeur absolue des Coefficients de régression à être inférieure à une valeur fixe, ce qui force certains coefficients à zéro, les excluant de l’impact sur la prédiction. Cette idée est similaire à la régression de crête, qui réduit également la taille des coefficients, mais la régression de crête a tendance à définir beaucoup moins de coefficients sur zéro.
Forme basique
Moindres carrés
Considérons un échantillon composé de N cas, chacun composé de p covariables et d’un résultat unique. Laisser y je {displaystyle y_{i}} 

min β 0 , β { ∑ i = 1 N ( y i − β 0 − x i T β ) 2 } subject to ∑ j = 1 p | β j | ≤ t . {displaystyle min _{beta _{0},beta }left{sum _{i=1}^{N}(y_{i}-beta _{0}-x_{i} ^{T}beta )^{2}right}{text{ sujet à }}sum _{j=1}^{p}|beta _{j}|leq t.} 
Ici β 0 {displaystyle bêta _{0}} 


Location X {displaystyle X} 


min β 0 , β { ‖ y − β 0 − X β ‖ 2 2 } subject to ‖ β ‖ 1 ≤ t , {displaystyle min _{beta _{0},beta }left{left|y-beta _{0}-Xbeta right|_{2}^{2} droite}{text{ sujet à }}|beta |_{1}leq t,} 
où ‖ u ‖ p = ( ∑ i = 1 N | u i | p ) 1 / p {displaystyle |u|_{p}=left(sum _{i=1}^{N}|u_{i}|^{p}right)^{1/p}} 

Dénotant la moyenne scalaire des points de données x i {displaystyle x_{i}} 



y i − β ^ 0 − x i T β = y i − ( y ̄ − x ̄ T β ) − x i T β = ( y i − y ̄ ) − ( x i − x ̄ ) T β , {displaystyle y_{i}-{hat {beta}}_{0}-x_{i}^{T}beta =y_{i}-({bar {y}}-{bar { x}}^{T}beta )-x_{i}^{T}beta =(y_{i}-{bar {y}})-(x_{i}-{bar {x}} )^{T}bêta ,} 
et par conséquent, il est courant de travailler avec des variables dont la moyenne est nulle. De plus, les covariables sont généralement standardisées ( ∑ i = 1 N x i 2 = 1 ) {displaystyle textstyle left(sum _{i=1}^{N}x_{i}^{2}=1right)} 
Il peut être utile de réécrire
min β ∈ R p { 1 N ‖ y − X β ‖ 2 2 } subject to ‖ β ‖ 1 ≤ t . {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}left|yXbeta right|_{2} ^{2}right}{text{ sujet à }}|beta |_{1}leq t.} 
sous la forme dite lagrangienne
min β ∈ R p { 1 N ‖ y − X β ‖ 2 2 + λ ‖ β ‖ 1 } {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}left|yXbeta right|_{2} ^{2}+lambda |beta |_{1}right}} 
où la relation exacte entre t {displaystyle t} 
Covariables orthonormées
Certaines propriétés de base de l’estimateur lasso peuvent maintenant être considérées.
En supposant d’abord que les covariables sont orthonormées de sorte que ( x i ∣ x j ) = δ i j {displaystyle (x_{i}mid x_{j})=delta _{ij}} 



β ^ j = S N λ ( β ^ j OLS ) = β ^ j OLS max ( 0 , 1 − N λ | β ^ j OLS | ) where β ^ OLS = ( X T X ) − 1 X T y {displaystyle {begin{aligned}{hat {beta }}_{j}={}&S_{Nlambda }({hat {beta }}_{j}^{text{OLS} })={hat {beta }}_{j}^{text{OLS}}max left(0,1-{frac {Nlambda }{|{hat {beta }} _{j}^{text{OLS}}|}}right)\&{text{ où }}{hat {beta }}^{text{OLS}}=(X^{T }X)^{-1}X^{T}yend{aligné}}} 
S α {displaystyle S_{alpha}} 

Dans la régression ridge, l’objectif est de minimiser
min β ∈ R p { 1 N ‖ y − X β ‖ 2 2 + λ ‖ β ‖ 2 2 } {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}|yXbeta |_{2}^{2} +lambda |beta |_{2}^{2}right}} 
cédant
β ^ j = ( 1 + N λ ) − 1 β ^ j OLS . {displaystyle {hat {beta}}_{j}=(1+Nlambda )^{-1}{hat {beta}}_{j}^{text{OLS}}.} 
La régression Ridge réduit tous les coefficients d’un facteur uniforme de ( 1 + N λ ) − 1 {displaystyle (1+Nlambda)^{-1}} 
Elle peut également être comparée à la régression avec sélection du meilleur sous-ensemble , dans laquelle le but est de minimiser
min β ∈ R p { 1 N ‖ y − X β ‖ 2 2 + λ ‖ β ‖ 0 } {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}left|yXbeta right|_{2} ^{2}+lambda |beta |_{0}right}} 
où ‖ ⋅ ‖ 0 {displaystyle |cdot |_{0}} 


β ^ j = H N λ ( β ^ j OLS ) = β ^ j OLS I ( | β ^ j OLS | ≥ N λ ) {displaystyle {hat {beta}}_{j}=H_{sqrt {Nlambda}}left({hat {beta}}_{j}^{text{OLS}} right)={hat {beta }}_{j}^{text{OLS}}mathrm {I} left(left|{hat {beta }}_{j}^{text {OLS}}right|geq {sqrt {Nlambda}}right)} 
où H α {displaystyle H_{alpha}} 
Par conséquent, les estimations au lasso partagent les caractéristiques de la régression de sélection de crête et du meilleur sous-ensemble, car elles réduisent toutes deux l’ampleur de tous les coefficients, comme la régression de crête et en fixent certains à zéro, comme dans le cas de la sélection du meilleur sous-ensemble. De plus, alors que la régression de crête met à l’échelle tous les coefficients par un facteur constant, le lasso traduit à la place les coefficients vers zéro par une valeur constante et les met à zéro s’ils l’atteignent.
Covariables corrélées
Dans un cas particulier, deux covariables, disons j et k , sont identiques pour chaque observation, de sorte que x ( j ) = x ( k ) {displaystyle x_{(j)}=x_{(k)}} 





![{displaystyle sin [0,1]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aff1a54fbbee4a2677039524a5139e952fa86eb9)





Forme générale
La régularisation au lasso peut être étendue à d’autres fonctions objectives telles que celles des modèles linéaires généralisés , des équations d’estimation généralisées , des modèles à risques proportionnels et des estimateurs M . [2] [3] Compte tenu de la fonction objectif
1 N ∑ i = 1 N f ( x i , y i , α , β ) {displaystyle {frac {1}{N}}sum _{i=1}^{N}f(x_{i},y_{i},alpha ,beta )} 
la version régularisée au lasso de l’estimateur s la solution de
min α , β 1 N ∑ i = 1 N f ( x i , y i , α , β ) subject to ‖ β ‖ 1 ≤ t {displaystyle min _{alpha ,beta }{frac {1}{N}}sum _{i=1}^{N}f(x_{i},y_{i},alpha , beta ){text{ sujet à }}|beta |_{1}leq t} 
où seulement β {displaystyle bêta} 

Interprétations
Interprétation géométrique
 Formes des régions de contrainte pour la régression lasso et ridge.
Formes des régions de contrainte pour la régression lasso et ridge.
Le lasso peut mettre les coefficients à zéro, alors que la régression de crête superficiellement similaire ne le peut pas. Cela est dû à la différence de forme de leurs limites de contraintes. La régression du lasso et de la crête peut être interprétée comme minimisant la même fonction objectif
min β 0 , β { 1 N ‖ y − β 0 − X β ‖ 2 2 } {displaystyle min _{beta _{0},beta }left{{frac {1}{N}}left|y-beta _{0}-Xbeta right |_{2}^{2}right}} 
mais avec des contraintes différentes : ‖ β ‖ 1 ≤ t {displaystyle |bêta |_{1}leq t} 


Rendre λ plus facile à interpréter avec un compromis précision-simplicité
Le lasso peut être redimensionné de sorte qu’il devient facile d’anticiper et d’influencer le degré de retrait associé à une valeur donnée de λ {displaystylelambda} 

min β ∈ R p { ( y − X β ) ′ ( y − X β ) ( y − X β 0 ) ′ ( y − X β 0 ) + 2 λ ∑ i = 1 p | β i − β 0 , i | q i } {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {(yXbeta )'(yXbeta )}{(yXbeta _{0} )'(yXbeta _{0})}}+2lambda sum _{i=1}^{p}{frac {|beta _{i}-beta _{0,i}| }{q_{i}}}right}} 
où q i {displaystyle q_{i}} 
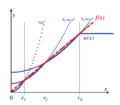
 Pistes de solution pour le l 1 {displaystyle ell _{1}}
Pistes de solution pour le l 1 {displaystyle ell _{1}} 



Étant donné un seul régresseur, la simplicité relative peut être définie en spécifiant q i {displaystyle q_{i}} 


b l 1 = { ( 1 − λ / R 2 ) b O L S if λ ≤ R 2 , 0 if λ > R 2 . {displaystyle b_{ell _{1}}={begin{cases}(1-lambda /R^{2})b_{OLS}&{mbox{if }}lambda leq R^{ 2},\0&{mbox{if}}lambda >R^{2}.end{cases}}} 
Si λ = 0 {displaystylelambda =0} 

Si un l 2 {displaystyle ell _{2}}
b l 2 = ( 1 + λ R 2 ( 1 − λ ) ) − 1 b O L S {displaystyle b_{ell _{2}}={bigg (}1+{frac {lambda }{R^{2}(1-lambda )}}{bigg )}^{-1 }b_{OLS}} 



Étant donné plusieurs régresseurs, le moment où un paramètre est activé (c’est-à-dire autorisé à s’écarter de β 0 {displaystyle bêta _{0}}
R 2 = 1 − ( y − X b ) ′ ( y − X b ) ( y − X β 0 ) ′ ( y − X β 0 ) . {displaystyle R^{2}=1-{frac {(y-Xb)'(y-Xb)}{(yXbeta _{0})'(yXbeta _{0})}}. } 
Un R 2 {displaystyle R^{2}} 
R ⊗ = ( X ′ y ~ 0 ) ( X ′ y ~ 0 ) ′ ( X ′ X ) − 1 ( y ~ 0 ′ y ~ 0 ) − 1 , {displaystyle R^{otimes }=(X'{tilde {y}}_{0})(X'{tilde {y}}_{0})'(X’X)^{-1 }({tilde {y}}_{0}'{tilde {y}}_{0})^{-1},} 
où y ~ 0 = y − X β 0 {displaystyle {tilde {y}}_{0}=yXbeta _{0}} 




Une version remise à l’échelle du lasso adaptatif de peut être obtenue en définissant q adaptive lasso , i = | b O L S , i − β 0 , i | {displaystyle q_{{mbox{lasso adaptatif}},i}=|b_{OLS,i}-beta _{0,i}|} 
b i = { ( 1 − λ / R i i ⊗ ) b O L S , i if λ ≤ R i i ⊗ , 0 if λ > R i i ⊗ . {displaystyle b_{i}={begin{cases}(1-lambda /R_{ii}^{otimes})b_{OLS,i}&{mbox{if }}lambda leq R_{ ii}^{otimes },\0&{mbox{if }}lambda >R_{ii}^{otimes }.end{cases}}} 
Autrement dit, si les régresseurs ne sont pas corrélés, λ {displaystylelambda}
Ces résultats peuvent être comparés à une version redimensionnée du lasso en définissant q lasso , i = 1 p ∑ l | b O L S , l − β 0 , l | {displaystyle q_{{mbox{lasso}},i}={frac {1}{p}}sum _{l}|b_{OLS,l}-beta _{0,l}|} 
λ ~ lasso , i = 1 p R i ⊗ ∑ l = 1 p R l ⊗ . {displaystyle {tilde {lambda}}_{{text{lasso}},i}={frac {1}{p}}{sqrt {R_{i}^{otimes}}} somme _{l=1}^{p}{sqrt {R_{l}^{otimes }}}.} 
Pour p = 1 {displaystyle p=1} 




Interprétation bayésienne
 Les distributions de Laplace sont fortement culminées à leur moyenne avec plus de densité de probabilité concentrée là-bas par rapport à une distribution normale.
Les distributions de Laplace sont fortement culminées à leur moyenne avec plus de densité de probabilité concentrée là-bas par rapport à une distribution normale.
Tout comme la régression de crête peut être interprétée comme une régression linéaire pour laquelle les coefficients ont été attribués à des distributions a priori normales, le lasso peut être interprété comme une régression linéaire pour laquelle les coefficients ont des distributions a priori de Laplace . La distribution de Laplace culmine brusquement à zéro (sa dérivée première est discontinue à zéro) et elle concentre sa masse de probabilité plus près de zéro que ne le fait la distribution normale. Cela fournit une explication alternative de la raison pour laquelle le lasso a tendance à mettre certains coefficients à zéro, contrairement à la régression de crête. [2]
Interprétation de la relaxation convexe
Lasso peut également être considéré comme une relaxation convexe du meilleur problème de régression de sélection de sous-ensemble, qui consiste à trouver le sous-ensemble de ≤ k {displaystyle leq k} 






Généralisations
Des variantes de lasso ont été créées afin de remédier aux limitations de la technique originale et de rendre la méthode plus utile pour des problèmes particuliers. Presque tous se concentrent sur le respect ou l’exploitation des dépendances entre les covariables.
La régularisation nette élastique ajoute une pénalité supplémentaire de type régression de crête qui améliore les performances lorsque le nombre de prédicteurs est supérieur à la taille de l’échantillon, permet à la méthode de sélectionner ensemble des variables fortement corrélées et améliore la précision globale de la prédiction. [5]
Le lasso de groupe permet de sélectionner des groupes de covariables liées en tant qu’unité unique, ce qui peut être utile dans des contextes où il n’est pas logique d’inclure certaines covariables sans d’autres. [9] D’autres extensions du lasso de groupe effectuent une Sélection de variables au sein de groupes individuels (lasso de groupe clairsemé) et permettent un chevauchement entre les groupes (lasso de groupe de chevauchement). [10] [11]
Le lasso fusionné peut tenir compte des caractéristiques spatiales ou temporelles d’un problème, ce qui donne des estimations qui correspondent mieux à la structure du système. [12] Les modèles régularisés au lasso peuvent être ajustés à l’aide de techniques telles que les Méthodes de sous-gradient , la régression des moindres angles (LARS) et les Méthodes de gradient proximal . La détermination de la valeur optimale du paramètre de régularisation est un élément important pour s’assurer que le modèle fonctionne bien ; il est généralement choisi à l’aide de la validation croisée .
Filet élastique
En 2005, Zou et Hastie ont introduit le filet élastique . [5] Lorsque p > n (le nombre de covariables est supérieur à la taille de l’échantillon), le lasso ne peut sélectionner que n covariables (même lorsque plusieurs sont associées au résultat) et il a tendance à sélectionner une Covariable dans n’importe quel ensemble de covariables hautement corrélées. De plus, même lorsque n > p , la régression de crête a tendance à mieux fonctionner étant donné les covariables fortement corrélées.
Le filet élastique prolonge le lasso en ajoutant un l 2 {displaystyle ell ^{2}}
min β ∈ R p { ‖ y − X β ‖ 2 2 + λ 1 ‖ β ‖ 1 + λ 2 ‖ β ‖ 2 2 } , {displaystyle min _{beta in mathbb {R} ^{p}}left{left|yXbeta right|_{2}^{2}+lambda _{1 }|beta |_{1}+lambda _{2}|beta |_{2}^{2}right},} 
ce qui équivaut à résoudre
min β 0 , β { ‖ y − β 0 − X β ‖ 2 2 } subject to ( 1 − α ) ‖ β ‖ 1 + α ‖ β ‖ 2 2 ≤ t , where α = λ 2 λ 1 + λ 2 . {displaystyle {begin{aligned}min _{beta _{0},beta }left{left|y-beta _{0}-Xbeta right|_{2 }^{2}right}&{text{ sujet à }}(1-alpha )|beta |_{1}+alpha |beta |_{2}^{2 }leq t,\&{text{ où }}alpha ={frac {lambda _{2}}{lambda _{1}+lambda _{2}}}.end{aligné }}} 
Ce problème peut être écrit sous une forme simple de lasso
min β ∗ ∈ R p { ‖ y ∗ − X ∗ β ∗ ‖ 2 2 + λ ∗ ‖ β ∗ ‖ 1 } {displaystyle min _{beta ^{*}in mathbb {R} ^{p}}left{left|y^{*}-X^{*}beta ^{*} right|_{2}^{2}+lambda ^{*}|beta ^{*}|_{1}right}} 
location
X ( n + p ) × p ∗ = ( 1 + λ 2 ) − 1 / 2 ( X λ 2 1 / 2 I p × p ) {displaystyle X_{(n+p)times p}^{*}=(1+lambda _{2})^{-1/2}{binom {X}{lambda _{2}^ {1/2}Je_{pfois p}}}} 


Puis β ^ = β ^ ∗ 1 + λ 2 {displaystyle {hat {beta }}={frac {{hat {beta }}^{*}}{sqrt {1+lambda _{2}}}}} 
β ^ j = β ^ j *,OLS 1 + λ 2 max ( 0 , 1 − λ ∗ | β ^ j *,OLS | ) = β ^ j OLS 1 + λ 2 max ( 0 , 1 − λ 1 | β ^ j OLS | ) = ( 1 + λ 2 ) − 1 β ^ j lasso . {displaystyle {hat {beta}}_{j}={frac {{hat {beta}}_{j}^{text{*,OLS}}}{sqrt {1+ lambda _{2}}}}max left(0,1-{frac {lambda ^{*}}{left|{hat {beta}}_{j}^{text{* ,OLS}}right|}}right)={frac {{hat {beta }}_{j}^{text{OLS}}}{1+lambda _{2}}} max left(0,1-{frac {lambda _{1}}{left|{hat {beta }}_{j}^{text{OLS}}right|}}right )=(1+lambda _{2})^{-1}{hat {beta }}_{j}^{text{lasso}}.} 
Ainsi, le résultat de la pénalité nette élastique est une combinaison des effets des pénalités de lasso et de crête.
Revenant au cas général, le fait que la fonction de pénalité soit maintenant strictement convexe signifie que si x ( j ) = x ( k ) {displaystyle x_{(j)}=x_{(k)}} 

| β ^ j − β k ^ | ‖ y ‖ ≤ λ 2 − 1 2 ( 1 − ρ j k ) , where ρ = X t X , {displaystyle {frac {|{hat {beta}}_{j}-{hat {beta _{k}}}|}{|y|}}leq lambda _{2 }^{-1}{sqrt {2(1-rho _{jk})}},{text{ où }}rho =X^{t}X,} 
est la matrice de corrélation de l’échantillon car la x {style d’affichage x} 
Par conséquent, les covariables fortement corrélées ont tendance à avoir des Coefficients de régression similaires, le degré de similarité dépendant à la fois ‖ y ‖ 1 {displaystyle |y|_{1}} 

Lasso de groupe
En 2006, Yuan et Lin ont introduit le lasso de groupe pour permettre à des groupes prédéfinis de covariables d’être sélectionnés conjointement dans ou hors d’un modèle. [9] Ceci est utile dans de nombreux contextes, peut-être plus évidemment lorsqu’une variable catégorique est codée comme une collection de covariables binaires. Dans ce cas, le lasso de groupe peut garantir que toutes les variables codant la Covariable catégorielle sont incluses ou exclues ensemble. Un autre cadre dans lequel le regroupement est naturel est celui des études biologiques. Étant donné que les gènes et les protéines se trouvent souvent dans des voies connues, quelles voies sont liées à un résultat peuvent être plus importantes que si des gènes individuels le sont. La fonction objectif pour le lasso de groupe est une généralisation naturelle de l’objectif standard du lasso
min β ∈ R p { ‖ y − ∑ j = 1 J X j β j ‖ 2 2 + λ ∑ j = 1 J ‖ β j ‖ K j } , ‖ z ‖ K j = ( z t K j z ) 1 / 2 {displaystyle min _{beta in mathbb {R} ^{p}}left{left|y-sum _{j=1}^{J}X_{j}beta _ {j}right|_{2}^{2}+lambda sum _{j=1}^{J}|beta _{j}|_{K_{j}}right },qquad |z|_{K_{j}}=(z^{t}K_{j}z)^{1/2}} 
où la matrice de conception X {displaystyle X} 



Lasso fusionné
Dans certains cas, le phénomène à l’étude peut avoir une structure spatiale ou temporelle importante qui doit être prise en compte lors de l’analyse, comme des séries chronologiques ou des données basées sur des images. En 2005, Tibshirani et ses collègues ont introduit le lasso fusionné pour étendre l’utilisation du lasso à ce type de données. [12] La fonction objectif du lasso fusionné est
min β { 1 N ∑ i = 1 N ( y i − x i t β ) 2 } subject to ∑ j = 1 p | β j | ≤ t 1 and ∑ j = 2 p | β j − β j − 1 | ≤ t 2 . {displaystyle {begin{aligned}&min _{beta }left{{frac {1}{N}}sum _{i=1}^{N}left(y_{i}-x_{i}^{t}beta right)^{2}right}\[4pt]&{text{ subject to }}sum _{j=1}^{p}|beta _{j}|leq t_{1}{text{ and }}sum _{j=2}^{p}|beta _{j}-beta _{j-1}|leq t_{2}.end{aligned}}} ![{displaystyle {begin{aligned}&min _{beta }left{{frac {1}{N}}sum _{i=1}^{N}left(y_{i}-x_{i}^{t}beta right)^{2}right}\[4pt]&{text{ subject to }}sum _{j=1}^{p}|beta _{j}|leq t_{1}{text{ and }}sum _{j=2}^{p}|beta _{j}-beta _{j-1}|leq t_{2}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a75f99fe3b19232504b470197d1158638ad10255)
La première contrainte est la contrainte du lasso, tandis que la seconde pénalise directement les grands changements par rapport à la structure temporelle ou spatiale, ce qui oblige les coefficients à varier en douceur pour refléter la logique sous-jacente du système. Le lasso groupé [13] est une généralisation du lasso fusionné qui identifie et regroupe les covariables pertinentes en fonction de leurs effets (coefficients). L’idée de base est de pénaliser les différences entre les coefficients afin que les uns non nuls se regroupent. Ceci peut être modélisé en utilisant la régularisation suivante :
∑ i < j p | β i − β j | ≤ t 2 . {displaystyle sum _{i<j}^{p}|beta _{i}-beta _{j}|leq t_{2}.} 
En revanche, les variables peuvent être regroupées en groupes hautement corrélés, puis une seule Covariable représentative peut être extraite de chaque groupe. [14]
Il existe des algorithmes qui résolvent le problème du lasso fusionné et certaines généralisations de celui-ci. Les algorithmes peuvent le résoudre exactement en un nombre fini d’opérations. [15]
Quasi-normes et régression de pont
 Un exemple de fonction potentielle PQSQ (fonction quadratique par morceaux de croissance sous-quadratique) u ( x ) {displaystyle u(x)}
Un exemple de fonction potentielle PQSQ (fonction quadratique par morceaux de croissance sous-quadratique) u ( x ) {displaystyle u(x)} 


 Un exemple de l’efficacité de la régression régularisée PQSQ l 1 {displaystyle ell ^{1}}
Un exemple de l’efficacité de la régression régularisée PQSQ l 1 {displaystyle ell ^{1}}
Lasso, filet élastique, groupe et lasso fusionné construisent les fonctions de pénalité à partir des l 1 {displaystyle ell ^{1}} 

min β ∈ R p { 1 N ‖ y − X β ‖ 2 2 + λ ‖ β ‖ 1 / 2 } , {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}left|yXbeta right|_{2} ^{2}+lambda {sqrt {|beta |_{1/2}}}right},} 
où
‖ β ‖ 1 / 2 = ( ∑ j = 1 p | β j | ) 2 {displaystyle |beta |_{1/2}=left(sum _{j=1}^{p}{sqrt {|beta _{j}|}}right)^{ 2}} 
On prétend que les quasi-normes fractionnaires l p {displaystyle ell ^{p}}
min β ∈ R p { 1 N ‖ y − X β ‖ 2 2 + λ ∑ j = 1 p θ ( β j 2 ) } , {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}left|yXbeta right|_{2} ^{2}+lambda sum _{j=1}^{p}vartheta (beta _{j}^{2})right},} 
où θ ( γ ) {displaystyle vartheta (gamma)} 



L’algorithme efficace de minimisation est basé sur l’ approximation quadratique par morceaux de la croissance sous-quadratique (PQSQ). [19]
Lasso adaptatif
Le lasso adaptatif a été introduit par Zou en 2006 pour la régression linéaire [20] et par Zhang et Lu en 2007 pour la régression à risques proportionnels. [21]
Lasso préalable
Le lasso antérieur a été introduit pour les modèles linéaires généralisés par Jiang et al. en 2016 pour intégrer des informations préalables, telles que l’importance de certaines covariables. [22] Dans le lasso préalable, ces informations sont résumées en pseudo-réponses (appelées réponses préalables) y ^ p {displaystyle {hat {y}}^{mathrm {p} }} 
min β ∈ R p { 1 N ‖ y − X β ‖ 2 2 + 1 N η ‖ y ^ p − X β ‖ 2 2 + λ ‖ β ‖ 1 } , {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}left|yXbeta right|_{2} ^{2}+{frac {1}{N}}eta left|{hat {y}}^{mathrm {p} }-Xbeta right|_{2}^{ 2}+lambda |beta |_{1}right},} 
qui équivaut à
min β ∈ R p { 1 N ‖ y ~ − X β ‖ 2 2 + λ 1 + η ‖ β ‖ 1 } , {displaystyle min _{beta in mathbb {R} ^{p}}left{{frac {1}{N}}left|{tilde {y}}-Xbeta right|_{2}^{2}+{frac {lambda }{1+eta }}|beta |_{1}right},} 
la fonction objectif lasso habituelle avec les réponses y {displaystyle y} 
Au lasso précédent, le paramètre η {displaystyle eta } 


Le lasso a priori est plus efficace dans l’estimation et la prédiction des paramètres (avec une erreur d’estimation et une erreur de prédiction plus petites) lorsque l’information a priori est de haute qualité, et est robuste aux informations a priori de faible qualité avec un bon choix du paramètre d’équilibrage η {displaystyle eta }
Calcul des solutions de lasso
La fonction de perte du lasso n’est pas différentiable, mais une grande variété de techniques issues de l’analyse convexe et de la théorie de l’optimisation ont été développées pour calculer le chemin des solutions du lasso. Celles-ci incluent la descente de coordonnées, [23] les Méthodes de sous-gradient, la régression du moindre angle (LARS) et les Méthodes de gradient proximal. [24] Les Méthodes de sous-gradient sont la généralisation naturelle des méthodes traditionnelles telles que la descente de gradient et la descente de gradient stochastiqueau cas où la fonction objectif n’est pas dérivable en tout point. LARS est une méthode étroitement liée aux modèles de lasso et, dans de nombreux cas, leur permet d’être ajustés efficacement, bien qu’ils ne fonctionnent pas bien dans toutes les circonstances. LARS génère des chemins de solution complets. [24] Les méthodes proximales sont devenues populaires en raison de leur flexibilité et de leurs performances et constituent un domaine de recherche active. Le choix de la méthode dépendra de la variante particulière du lasso, des données et des ressources disponibles. Cependant, les méthodes proximales fonctionnent généralement bien.
Choix du paramètre de régularisation
Choix du paramètre de régularisation ( λ {displaystylelambda}
Des critères d’information tels que le critère d’information bayésien (BIC) et le critère d’information d’Akaike (AIC) pourraient être préférables à la validation croisée, car ils sont plus rapides à calculer et leurs performances sont moins volatiles dans de petits échantillons. [25] Un critère d’information sélectionne le paramètre de régularisation de l’estimateur en maximisant la précision en échantillon d’un modèle tout en pénalisant son nombre effectif de paramètres/degrés de liberté. Zou et al. proposé de mesurer les degrés de liberté effectifs en comptant le nombre de paramètres qui s’écartent de zéro. [26] L’approche des degrés de liberté a été considérée comme erronée par Kaufman et Rosset [27] et Janson et al., [28]car les degrés de liberté d’un modèle peuvent augmenter même lorsqu’il est davantage pénalisé par le paramètre de régularisation. Comme alternative, la mesure de simplicité relative définie ci-dessus peut être utilisée pour compter le nombre effectif de paramètres. [25] Pour le lasso, cette mesure est donnée par
P ^ = ∑ i = 1 p | β i − β 0 , i | 1 p ∑ l | b O L S , l − β 0 , l | {displaystyle {hat {mathcal {P}}}=sum _{i=1}^{p}{frac {|beta _{i}-beta _{0,i}|}{ {frac {1}{p}}sum _{l}|b_{OLS,l}-beta _{0,l}|}}} 
qui augmente de manière monotone de zéro à p {displaystyle p} 
Candidatures sélectionnées
LASSO a été appliqué en économie et en finance, et s’est avéré améliorer la prédiction et sélectionner des variables parfois négligées, par exemple dans la littérature sur la prédiction des faillites d’entreprises [29] ou la prédiction des entreprises à forte croissance. [30]
Voir également
- Sélection du modèle
- Régression non paramétrique
- Régularisation de Tikhonov
Références
- ^ un bc Santosa , Fadil; Symes, William W. (1986). “Inversion linéaire des sismogrammes de réflexion à bande limitée”. Journal SIAM sur le calcul scientifique et statistique . SIAM. 7 (4): 1307-1330. doi : 10.1137/0907087 .
- ^ un bcdefg Tibshirani , Robert ( 1996 ). “Régression retrait et de la sélection via le lasso”. Journal de la Société royale de statistique . Série B (méthodologique). Wiley. 58 (1): 267-288. JSTOR 2346178 .
- ^ un b Tibshirani, Robert (1997). “La méthode du lasso pour la Sélection de variables dans le modèle de Cox”. Statistiques en médecine . 16 (4): 385–395. CiteSeerX 10.1.1.411.8024 . doi : 10.1002/(SICI)1097-0258(19970228)16:4<385::AID-SIM380>3.0.CO;2-3 . PMID 9044528 .
- ^ Breiman, Lion (1995). “Meilleure régression de sous-ensemble en utilisant le garrot non négatif”. Technométrie . 37 (4): 373–384. doi : 10.1080/00401706.1995.10484371 .
- ^ un bcde Zou , Hui ; Hastie, Trevor (2005). “Régularisation et Sélection Variable via le Net Élastique”. Journal de la Société royale de statistique . Série B (Méthodologie statistique). Wiley. 67 (2): 301-20. doi : 10.1111/j.1467-9868.2005.00503.x . JSTOR 3647580 .
- ^ un b Hoornweg, Victor (2018). “Chapitre 8” . Sciences : En cours de soumission . Presse Hoornweg. ISBN 978-90-829188-0-9.
- ^ Motamedi, Fahimeh; Sanchez, Horacio; Mehri, Alireza; Ghasemi, Fahimeh (octobre 2021). “Accélérer l’analyse de données volumineuses grâce à l’algorithme de forêt aléatoire LASSO dans les études QSAR”. 37 (19). Bioinformatique : 1–7. doi : 10.1093/bioinformatique/btab659 . ISSN 1367-4803 . {{cite journal}}: Cite journal requires |journal= (help)
- ^ Zo, Hui (2006). “Le lasso adaptatif et ses propriétés Oracle” (PDF) .
- ^ un Yuan b , Ming; Lin, Yi (2006). “Sélection de modèle et estimation dans la régression avec des variables groupées”. Journal de la Société royale de statistique . Série B (Méthodologie statistique). Wiley. 68 (1): 49–67. doi : 10.1111/j.1467-9868.2005.00532.x . JSTOR 3647556 .
- ^ un b Puig, Arnau Tibau, Ami Wiesel et Alfred O. Hero III . ” Un opérateur de retrait-seuil multidimensionnel “. Actes du 15e atelier sur le traitement statistique du signal, SSP’09, IEEE, pp. 113–116.
- ^ un b Jacob, Laurent, Guillaume Obozinski et Jean-Philippe Vert. ” Groupe Lasso avec chevauchement et graphe LASSO “. Apparu dans les Actes de la 26e Conférence internationale sur l’apprentissage automatique, Montréal, Canada, 2009.
- ^ un b Tibshirani, Robert, Michael Saunders, Saharon Rosset, Ji Zhu et Keith Knight. 2005. “Sparsity and Smoothness via the Fused lasso”. Journal de la Société royale de statistique. Série B (Méthodologie statistique) 67 (1). Wiley : 91-108. https://www.jstor.org/stable/3647602 .
- ^ Elle, Yiyuan (2010). “Régression parcimonieuse avec clustering exact” . Journal électronique de statistiques . 4 : 1055–1096. doi : 10.1214/10-EJS578 .
- ^ Reid, Stephen (2015). “Régression parcimonieuse et tests marginaux à l’aide de prototypes de cluster” . Biostatistique . 17 (2): 364–376. arXiv : 1503.00334 . Bib code : 2015arXiv150300334R . doi : 10.1093/biostatistics/kxv049 . PMC 5006118 . PMID 26614384 .
- ^ Bento, José (2018). “Sur la complexité du lasso fondu pondéré”. Lettres IEEE en traitement du signal . 25 (10) : 1595-1599. arXiv : 1801.04987 . Bibcode : 2018ISPL…25.1595B . doi : 10.1109/LSP.2018.2867800 . S2CID 5008891 .
- ^ a b Mirkes EM Référentiel de régression PQSQ-régularisé , GitHub.
- ^ Fu, Wenjiang J. 1998. « Le Pont contre le Lasso ». Journal of Computational and Graphical Statistics 7 (3). Taylor et Francis : 397-416.
- ^ Aggarwal CC, Hinneburg A., Keim DA (2001) ” Sur le comportement surprenant des métriques de distance dans l’espace de grande dimension .” Dans : Van den Bussche J., Vianu V. (eds) Database Theory — ICDT 2001. ICDT 2001. Lecture Notes in Computer Science, Vol. 1973. Springer, Berlin, Heidelberg, p. 420-434.
- ^ un b Gorban, AN; Mirkes, EM ; Zinovyev, A. (2016) « Approximations quadratiques par morceaux de fonctions d’erreur arbitraires pour un apprentissage automatique rapide et robuste. » Neural Networks, 84, 28-38.
- ^ Zo (2006, JASA)
- ^ Zhang et Lu (2007, Biometrika)
- ^ Jiang, Yuan (2016). “Sélection de variables avec information a priori pour les modèles linéaires généralisés via la méthode du lasso a priori” . Journal de l’Association statistique américaine . 111 (513): 355–376. doi : 10.1080/01621459.2015.1008363 . PMC 4874534 . PMID 27217599 .
- ^ Jérôme Friedman, Trevor Hastie et Robert Tibshirani. 2010. “Chemins de régularisation pour les modèles linéaires généralisés via la descente de coordonnées”. Journal of Statistical Software 33 (1): 1-21. https://www.jstatsoft.org/article/view/v033i01/v33i01.pdf .
- ^ un b Efron, Bradley, Trevor Hastie, Iain Johnstone et Robert Tibshirani. 2004. “Régression du moindre angle”. Les Annales de statistiques 32 (2). Institut de statistique mathématique : 407–51. https://www.jstor.org/stable/3448465 .
- ^ un b Hoornweg, Victor (2018). “Chapitre 9” . Sciences : En cours de soumission . Presse Hoornweg. ISBN 978-90-829188-0-9.
- ^ Zo, Hui; Hastie, Trevor ; Tibshirani, Robert (2007). “Sur les ‘Degrés de Liberté’ du Lasso” . Les Annales de la statistique . 35 (5): 2173–2792. doi : 10.1214/009053607000000127 .
- ^ Kaufman, S.; En ligneRoset, S. (2014). “Quand plus de régularisation implique-t-elle moins de degrés de liberté ? Conditions suffisantes et contre-exemples”. Biométrie . 101 (4): 771–784. doi : 10.1093/biomet/asu034 . ISSN 0006-3444 .
- ^ Janson, Lucas; Fithian, Guillaume; Hastie, Trevor J. (2015). “Degrés de liberté effectifs: une métaphore erronée” . Biométrie . 102 (2): 479–485. doi : 10.1093/biomet/asv019 . ISSN 0006-3444 . PMC 4787623 . PMID 26977114 .
- ^ Shaonan, Tian; Yu, Yan; Guo, Hui (2015). “Sélection variable et prévisions de faillite d’entreprise” . Journal de la banque et de la finance . 52 (1): 89-100. doi : 10.1016/j.jbankfin.2014.12.003 .
- ^ Coad, Alex; Srhoj, Stjepan (2020). “Attraper des gazelles avec un lasso : techniques de données volumineuses pour la prédiction des entreprises à forte croissance” . Économie des petites entreprises . 55 (1): 541–565. doi : 10.1007/s11187-019-00203-3 .