Hélicoptère
Un hélicoptère est un type de giravion dans lequel la portance et la poussée sont fournies par des rotors tournant horizontalement . Cela permet à l’hélicoptère de décoller et d’atterrir verticalement , de planer et de voler en avant, en arrière et latéralement. Ces attributs permettent aux hélicoptères d’être utilisés dans des zones encombrées ou isolées où les aéronefs à voilure fixe et de nombreuses formes d’ aéronefs STOL (Short TakeOff and Landing) ou STOVL (Short TakeOff and Vertical Landing) ne peuvent pas fonctionner sans piste .
 Un hélicoptère Bell 206 avec le LAPD
Un hélicoptère Bell 206 avec le LAPD
En 1942, le Sikorsky R-4 est devenu le premier hélicoptère à atteindre la production à grande échelle . [1] [2]
Bien que la plupart des conceptions antérieures utilisaient plus d’un Rotor principal, la configuration d’un seul Rotor principal accompagné d’un rotor de queue anti-couple vertical (c’est-à-dire unicopter, à ne pas confondre avec le monocoptère monopale ) est devenue la configuration d’hélicoptère la plus courante. Cependant, des hélicoptères à double Rotor principal (bicopters), dans des configurations de rotors en tandem ou transversaux , sont parfois utilisés en raison de leur plus grande capacité de charge utile que la conception monorotor, et des hélicoptères à rotor coaxial , tiltrotor et composé volent également tous aujourd’hui. Hélicoptères quadrotor ( quadricoptères) ont été lancés dès 1907 en France et, avec d’autres types de multicoptères , ont été développés principalement pour des applications spécialisées telles que les drones .
Étymologie
Le mot anglais hélicoptère est adapté du mot français hélicoptère , inventé par Gustave Ponton d’Amécourt en 1861, qui provient du grec helix ( ἕλιξ ) “hélice, spirale, tourbillon, convolution” [3] et pteron ( πτερόν ) “aile “. [4] [5] Pour diverses raisons, le mot est souvent erronément, d’un point de vue étymologique, analysé par les anglophones en hélicoptère et hélicoptère , conduisant à des mots comme héliport et quadcopter . [6] [7]Les surnoms en anglais pour “hélicoptère” incluent “chopper”, “copter”, “heli” et “whirlybird”. Dans l’ armée américaine , l’argot commun est “helo” prononcé avec un long “e”.
Caractéristiques de conception
 Rotors principal et anti-couple
Rotors principal et anti-couple
Un hélicoptère est un type de giravion dans lequel la portance et la poussée sont fournies par un ou plusieurs rotors à rotation horizontale. [8] En revanche, l’ autogire (ou gyroplane) et le gyrodyne ont un rotor à rotation libre pour tout ou partie de l’enveloppe de vol, s’appuyant sur un système de poussée séparé pour propulser l’engin vers l’avant, de sorte que le flux d’air fait tourner le rotor pour fournir ascenseur. L’hélicoptère composé dispose également d’un système de poussée séparé, mais continue d’alimenter le rotor tout au long du vol normal.
Système de rotor
Le système rotor, ou plus simplement rotor , est la partie tournante d’un hélicoptère qui génère la portance . Un système de rotor peut être monté horizontalement, comme le sont les rotors principaux, fournissant une portance verticale, ou il peut être monté verticalement, comme un rotor de queue, pour fournir une poussée horizontale pour contrer le couple des rotors principaux. Le rotor se compose d’un mât, d’un moyeu et de pales de rotor.
Le mât est un arbre métallique cylindrique qui s’étend vers le haut à partir de la transmission. Au sommet du mât se trouve le point d’attache des pales du rotor appelé moyeu. Les systèmes de Rotor principal sont classés en fonction de la manière dont les pales du rotor sont fixées et se déplacent par rapport au moyeu. Il existe trois types de base : sans charnière, entièrement articulé et oscillant ; bien que certains systèmes de rotor modernes utilisent une combinaison de ceux-ci.
Anti-couple
La plupart des hélicoptères ont un seul Rotor principal, mais le couple créé par sa Traînée aérodynamique doit être contré par un couple opposé. La conception sur laquelle Igor Sikorsky a opté pour son VS-300 était un rotor de queue plus petit. Le rotor de queue pousse ou tire contre la queue pour contrer l’effet de couple, et c’est devenu la configuration la plus courante pour la conception d’hélicoptères, généralement à l’extrémité d’une poutre de queue .
Certains hélicoptères utilisent d’autres commandes anti-couple au lieu du rotor de queue, comme le ventilateur canalisé (appelé Fenestron ou FANTAIL ) et NOTAR . NOTAR fournit un anti-couple similaire à la façon dont une aile développe la portance grâce à l’utilisation de l’ effet Coandă sur la poutre de queue. [9]
 MD Hélicoptères 520N NOTAR
MD Hélicoptères 520N NOTAR
L’utilisation de deux ou plusieurs rotors horizontaux tournant dans des directions opposées est une autre configuration utilisée pour contrer les effets du couple sur l’aéronef sans compter sur un rotor de queue anti-couple. Cela permet de détourner la puissance normalement requise pour que le rotor de queue soit appliqué entièrement aux rotors principaux, augmentant ainsi l’efficacité énergétique et la capacité de levage de l’avion. Il existe plusieurs configurations courantes qui utilisent l’effet contrarotatif au profit du giravion :
- Les rotors tandem sont deux rotors contrarotatifs, l’un monté derrière l’autre.
- Les rotors transversaux sont une paire de rotors contrarotatifs montés transversalement aux extrémités d’ailes fixes ou de structures de stabilisateur. Désormais utilisés sur les tiltrotors , certains premiers modèles d’hélicoptères les avaient utilisés.
- Les rotors coaxiaux sont deux rotors contrarotatifs montés l’un au-dessus de l’autre avec le même axe.
- Les rotors enchevêtrés sont deux rotors contrarotatifs montés à proximité l’un de l’autre à un angle suffisant pour permettre aux rotors de s’engrener sur le dessus de l’avion sans entrer en collision. Les aéronefs qui l’utilisent sont connus sous le nom de synchropter .
- Les multirotors utilisent trois rotors ou plus. Des termes spécifiques sont également utilisés en fonction du nombre exact de rotors, tels que tricopter , quadcopter , hexacopter et octocopter pour trois rotors, quatre rotors, six rotors et huit rotors respectivement, dont le quadcopter est le plus courant. Les multirotors sont principalement utilisés sur les drones et l’utilisation sur les avions avec un pilote humain est rare.
Les conceptions Tip Jet permettent au rotor de se pousser dans l’air et évitent de générer un couple. [dix]
Moteurs
Le nombre, la taille et le type de moteur(s) utilisé(s) sur un hélicoptère déterminent la taille, la fonction et la capacité de cette conception d’hélicoptère. Les premiers moteurs d’hélicoptères étaient de simples dispositifs mécaniques, tels que des élastiques ou des broches, qui reléguaient la taille des hélicoptères aux jouets et aux petits modèles. Pendant un demi-siècle avant le premier vol d’avion, les moteurs à vapeur ont été utilisés pour faire avancer le développement de la compréhension de l’aérodynamique des hélicoptères, mais la puissance limitée ne permettait pas le vol habité. L’introduction du moteur à combustion interne à la fin du 19e siècle est devenue le tournant décisif pour le développement des hélicoptères, car des moteurs ont commencé à être développés et produits suffisamment puissants pour permettre des hélicoptères capables de transporter des humains. [ citation nécessaire ]
 Le moteur à turbine de l’ hélicoptère CH-53 Sea Stallion
Le moteur à turbine de l’ hélicoptère CH-53 Sea Stallion
Les premières conceptions d’hélicoptères utilisaient des moteurs sur mesure ou des moteurs rotatifs conçus pour les avions, mais ceux-ci ont rapidement été remplacés par des moteurs automobiles et des Moteurs radiaux plus puissants . Le facteur unique et le plus limitant du développement des hélicoptères au cours de la première moitié du 20e siècle était que la quantité de puissance produite par un moteur n’était pas en mesure de surmonter le poids du moteur en vol vertical. Cela a été surmonté dans les premiers hélicoptères à succès en utilisant les plus petits moteurs disponibles. Lorsque le moteur compact et plat a été développé, l’industrie des hélicoptères a trouvé un groupe motopropulseur plus léger facilement adapté aux petits hélicoptères, bien que les Moteurs radiaux aient continué à être utilisés pour les plus gros hélicoptères. [ citation nécessaire ]
Les moteurs à turbine ont révolutionné l’industrie aéronautique; et le turbomoteur pour hélicoptère, lancé en décembre 1951 par le Kaman K-225 susmentionné, a finalement donné aux hélicoptères un moteur avec une grande quantité de puissance et une faible pénalité de poids. Les turbomoteurs sont également plus fiables que les moteurs à pistons, en particulier lorsqu’ils produisent les niveaux de puissance élevés et soutenus requis par un hélicoptère. Le turbomoteur a pu être adapté à la taille de l’hélicoptère en cours de conception, de sorte que tous les modèles d’hélicoptères, sauf les plus légers, sont aujourd’hui propulsés par des moteurs à turbine. [ citation nécessaire ]
Les moteurs à réaction spéciaux développés pour entraîner le rotor à partir des pointes de rotor sont appelés jets de pointe . Les jets à pointe alimentés par un compresseur à distance sont appelés jets à pointe froide, tandis que ceux alimentés par des gaz d’échappement de combustion sont appelés jets à pointe chaude. Un exemple d’hélicoptère à jet froid est le Sud-Ouest Djinn , et un exemple d’hélicoptère à jet à pointe chaude est le YH-32 Hornet . [ citation nécessaire ]
Certains hélicoptères radiocommandés et plus petits véhicules aériens sans pilote de type hélicoptère utilisent des moteurs électriques ou des moteurs de moto. [11] Les hélicoptères radiocommandés peuvent également avoir des moteurs à piston qui utilisent des carburants autres que l’essence, comme le nitrométhane . Certains moteurs à turbine couramment utilisés dans les hélicoptères peuvent également utiliser du biodiesel au lieu du carburéacteur. [12] [13]
Il existe également des hélicoptères à propulsion humaine .
Commandes de vol
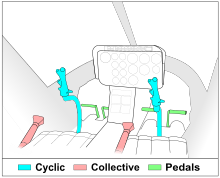 Commandes depuis un Bell 206
Commandes depuis un Bell 206
Un hélicoptère a quatre entrées de commandes de vol. Ce sont le cyclique, le collectif, la pédale anti-couple et l’accélérateur. La commande cyclique est généralement située entre les jambes du pilote et est communément appelée manche cyclique ou simplement cyclique . Sur la plupart des hélicoptères, le cyclique est similaire à un joystick. Cependant, le Robinson R22 et le Robinson R44 ont un système de commande cyclique à barre oscillante unique et quelques hélicoptères ont une commande cyclique qui descend dans le cockpit depuis le dessus.
La commande est appelée cyclique car elle modifie le Pas cyclique des pales principales. Le résultat est d’incliner le disque du rotor dans une direction particulière, entraînant le déplacement de l’hélicoptère dans cette direction. Si le pilote pousse le cyclique vers l’avant, le disque du rotor s’incline vers l’avant et le rotor produit une poussée vers l’avant. Si le pilote pousse le cyclique sur le côté, le disque du rotor s’incline de ce côté et produit une poussée dans cette direction, ce qui fait planer l’hélicoptère sur le côté.
La commande de pas collectif ou collectif est située sur le côté gauche du siège du pilote avec une commande de friction réglable pour empêcher tout mouvement involontaire. Le collectif modifie l’angle de calage de toutes les pales du Rotor principal collectivement (c’est-à-dire toutes en même temps) et indépendamment de leur position. Par conséquent, si une action collective est effectuée, toutes les pales changent de manière égale, et le résultat est que l’hélicoptère augmente ou diminue d’altitude.
Un plateau cyclique contrôle le pas collectif et cyclique des pales principales. Le plateau cyclique se déplace de haut en bas, le long de l’arbre principal, pour modifier le pas des deux pales. Cela amène l’hélicoptère à pousser l’air vers le bas ou vers le haut, selon l’ angle d’attaque . Le plateau cyclique peut également changer son angle pour déplacer l’angle des pales vers l’avant ou vers l’arrière, ou à gauche et à droite, pour faire bouger l’hélicoptère dans ces directions.
Les pédales anti-couple sont situées dans la même position que les pédales de direction dans un aéronef à voilure fixe et ont un objectif similaire, à savoir contrôler la direction dans laquelle le nez de l’aéronef est pointé. L’application de la pédale dans une direction donnée modifie le pas des pales du rotor de queue, augmentant ou réduisant la poussée produite par le rotor de queue et provoquant un lacet du nez dans la direction de la pédale appliquée. Les pédales modifient mécaniquement le pas du rotor de queue en modifiant la quantité de poussée produite.
Les rotors d’hélicoptère sont conçus pour fonctionner dans une plage étroite de régime . [14] [15] [16] [17] [18] L’accélérateur contrôle la puissance produite par le moteur, qui est relié au rotor par une transmission à rapport fixe. Le but de la manette des gaz est de maintenir une puissance moteur suffisante pour maintenir le régime du rotor dans les limites autorisées afin que le rotor produise suffisamment de portance pour le vol. Dans les hélicoptères monomoteurs, la commande des gaz est une Poignée tournante de style moto montée sur la commande collective, tandis que les hélicoptères bimoteurs ont un levier de puissance pour chaque moteur.
Hélicoptère composé
Un hélicoptère composé dispose d’un système supplémentaire pour la poussée et, généralement, de petites ailes fixes tronquées . Cela décharge le rotor en croisière, ce qui permet de ralentir sa rotation , augmentant ainsi la vitesse maximale de l’avion. Le Lockheed AH-56A Cheyenne a détourné jusqu’à 90% de sa puissance moteur vers une Hélice propulsive pendant le vol vers l’avant. [19]
Vol
Il existe trois conditions de vol de base pour un hélicoptère : le vol stationnaire, le vol vers l’avant et la transition entre les deux.
Flotter
 Un HH-65 tient un vol stationnaire tout en effectuant une formation de levage de sauvetage
Un HH-65 tient un vol stationnaire tout en effectuant une formation de levage de sauvetage
Le vol stationnaire est la partie la plus difficile du pilotage d’un hélicoptère. En effet, un hélicoptère génère son propre air en rafales en vol stationnaire, qui agit contre le fuselage et les gouvernes de vol. Le résultat final est des commandes constantes et des corrections par le pilote pour maintenir l’hélicoptère là où il doit être. [20] Malgré la complexité de la tâche, les commandes en vol stationnaire sont simples. Le cyclique est utilisé pour éliminer la dérive dans le plan horizontal, c’est-à-dire pour contrôler l’avant et l’arrière, la droite et la gauche. Le collectif sert à maintenir l’altitude. Les pédales sont utilisées pour contrôler la direction du nez ou le cap. C’est l’interaction de ces commandes qui rend le vol stationnaire si difficile, car un réglage de l’une quelconque des commandes nécessite un réglage des deux autres, créant un cycle de correction constante.
Transition du vol stationnaire au vol vers l’avant
Lorsqu’un hélicoptère passe du vol stationnaire au vol vers l’avant, il entre dans un état appelé portance translationnelle qui fournit une portance supplémentaire sans augmenter la puissance. Cet état, le plus souvent, se produit lorsque la vitesse atteint environ 16 à 24 nœuds (30 à 44 km / h; 18 à 28 mph) et peut être nécessaire pour qu’un hélicoptère obtienne un vol.
Vol vers l’avant
En vol vers l’avant, les commandes de vol d’un hélicoptère se comportent davantage comme celles d’un avion à voilure fixe. L’application d’une pression vers l’avant sur le cyclique entraînera un piqué du nez, avec une augmentation de la vitesse et une perte d’altitude qui en résultent. Le cyclique arrière fera cabrer le nez, ralentissant l’hélicoptère et le faisant monter. Augmenter le collectif (puissance) tout en maintenant une vitesse constante induira une montée tandis que la diminution du collectif provoquera une descente. La coordination de ces deux entrées, collectif bas plus cyclique arrière ou collectif haut plus cyclique avant, entraînera des changements de vitesse tout en maintenant une altitude constante. Les pédales remplissent la même fonction dans un hélicoptère et un avion à voilure fixe, pour maintenir un vol équilibré. Cela se fait en appliquant une entrée de pédale dans la direction nécessaire pour centrer la balle dans leindicateur de virage et d’inclinaison .
Les usages
 Un Bell 205 jetant de l’eau sur un feu
Un Bell 205 jetant de l’eau sur un feu
En raison des caractéristiques de fonctionnement de l’hélicoptère (sa capacité à décoller et à atterrir verticalement et à planer pendant de longues périodes, ainsi que les propriétés de maniement de l’avion dans des conditions de faible vitesse anémométrique ) , il s’est avéré avantageux d’effectuer des tâches qui n’étaient auparavant pas possible avec d’autres aéronefs, ou demandaient beaucoup de temps ou de travail au sol. Aujourd’hui, les utilisations des hélicoptères comprennent le transport de personnes et de marchandises, les utilisations militaires, la construction, la lutte contre les incendies, la recherche et le sauvetage , le tourisme , le transport médical, l’application de la loi, l’agriculture, les nouvelles et les médias et l’observation aérienne , entre autres. [21]
Un hélicoptère utilisé pour transporter des charges reliées à de longs câbles ou à des élingues s’appelle une grue aérienne . Les grues aériennes sont utilisées pour placer des équipements lourds, tels que des tours de transmission radio et de grandes unités de climatisation, au sommet de grands immeubles, ou lorsqu’un élément doit être soulevé dans une zone éloignée, comme une tour radio élevée au sommet d’un colline ou montagne. Les hélicoptères sont utilisés comme grues aériennes dans l’industrie forestière pour soulever des arbres hors d’un terrain où les véhicules ne peuvent pas circuler et où les préoccupations environnementales interdisent la construction de routes. [22] Ces opérations sont appelées palangres en raison de la longue élingue unique utilisée pour transporter la charge. [23]Dans le service militaire, les hélicoptères sont souvent utiles pour la livraison de charges suspendues surdimensionnées qui ne rentreraient pas à l’intérieur d’un avion cargo ordinaire: pièces d’artillerie, grosses machines (radars de terrain, équipement de communication, générateurs électriques) ou palettes de fret en vrac. Dans les opérations militaires, ces charges utiles sont souvent livrées dans des endroits éloignés rendus inaccessibles par des terrains montagneux ou fluviaux, ou des navires de guerre en mer.
La plus grande opération d’hélicoptères sans combat de l’histoire a été l’opération de gestion des catastrophes après la catastrophe nucléaire de Tchernobyl en 1986 . Des centaines de pilotes ont été impliqués dans des missions de largage et d’observation, effectuant des dizaines de sorties par jour pendant plusieurs mois.
« Helitack » est l’utilisation d’hélicoptères pour lutter contre les incendies de forêt . [24] Les hélicoptères sont utilisés pour la lutte aérienne contre les incendies (bombes à eau) et peuvent être équipés de réservoirs ou transporter des hélibuckets . Les hélibuckets, tels que le seau Bambi, sont généralement remplis en plongeant le seau dans des lacs, des rivières, des réservoirs ou des réservoirs portables. Les réservoirs installés sur les hélicoptères sont remplis à partir d’un tuyau pendant que l’hélicoptère est au sol ou l’eau est siphonnée des lacs ou des réservoirs à travers un tuba suspendu pendant que l’hélicoptère survole la source d’eau. Les hélicoptères Helitack sont également utilisés pour livrer les pompiers, qui descendent en rappeljusqu’aux zones inaccessibles et pour ravitailler les pompiers. Les hélicoptères de lutte contre les incendies courants comprennent des variantes du Bell 205 et de l’ hélitanker Erickson S-64 Aircrane.
Les hélicoptères sont utilisés comme ambulances aériennes pour l’assistance médicale d’urgence dans des situations où une ambulance ne peut pas atteindre facilement ou rapidement les lieux, ou ne peut pas transporter le patient vers un établissement médical à temps. Les hélicoptères sont également utilisés lorsque les patients doivent être transportés entre les établissements médicaux et le transport aérien est la méthode la plus pratique. Un hélicoptère d’ambulance aérienne est équipé pour stabiliser et fournir un traitement médical limité à un patient en vol. L’utilisation d’hélicoptères comme ambulances aériennes est souvent appelée ” MEDEVAC “, et les patients sont appelés ” transportés par avion ” ou ” évacués médicalement “. Cette utilisation a été lancée pendant la guerre de Corée, lorsque le temps nécessaire pour atteindre un établissement médical a été réduit à trois heures par rapport aux huit heures nécessaires pendant la Seconde Guerre mondiale , et encore réduit à deux heures par la guerre du Vietnam . [25] Dans le service naval, une fonction principale des hélicoptères de sauvetage est de récupérer rapidement les équipages abattus impliqués dans des accidents survenus lors du lancement ou de la récupération à bord des porte-avions. Au cours des années passées, cette fonction était remplie par des destroyers escortant le porte-avions, mais depuis lors, les hélicoptères se sont révélés beaucoup plus efficaces.
Les services de police et autres forces de l’ordre utilisent des hélicoptères pour poursuivre les suspects. Étant donné que les hélicoptères peuvent obtenir une vue aérienne unique, ils sont souvent utilisés en collaboration avec la police sur le terrain pour signaler les emplacements et les mouvements des suspects. Ils sont souvent équipés d’un équipement d’éclairage et de détection de chaleur pour les activités nocturnes.
 Bell 206 de KPRC assurant une couverture aérienne des nouvelles
Bell 206 de KPRC assurant une couverture aérienne des nouvelles
Les forces militaires utilisent des hélicoptères d’attaque pour mener des attaques aériennes sur des cibles au sol. Ces hélicoptères sont équipés de lance-missiles et de miniguns . Les hélicoptères de transport sont utilisés pour transporter des troupes et des fournitures là où l’absence de piste d’ atterrissage rendrait impossible le transport par aéronef à voilure fixe. L’utilisation d’hélicoptères de transport pour livrer des troupes en tant que force d’attaque sur un objectif est appelée « assaut aérien ». Des systèmes d’hélicoptères de systèmes aériens sans pilote (UAS) de différentes tailles sont développés par des entreprises pour des tâches de reconnaissance et de surveillance militaires. Les forces navales utilisent également des hélicoptères équipés desonar plongeant pour la lutte anti-sous-marine , car ils peuvent opérer à partir de petits navires.
Les compagnies pétrolières affrètent des hélicoptères pour déplacer rapidement les travailleurs et les pièces vers des sites de forage éloignés situés en mer ou dans des endroits éloignés. L’avantage de la vitesse par rapport aux bateaux rend les coûts d’exploitation élevés des hélicoptères rentables pour garantir que les plates-formes pétrolières continuent de fonctionner. Diverses sociétés se spécialisent dans ce type d’opération.
La NASA développe le Mars Helicopter , un hélicoptère de 1,8 kg (4,0 lb) qui sera lancé pour surveiller Mars (avec un rover) en 2020. Étant donné que l’atmosphère martienne est 100 fois plus mince que celle de la Terre, ses deux pales tourneront à près de 3 000 tours par minute, environ 10 fois plus rapide que celle d’un hélicoptère terrestre. [26]
Dans la Collecte d’informations électroniques , les hélicoptères ont fourni des vues aériennes de certains grands reportages, et ce, depuis la fin des années 1960. Des hélicoptères ont également été utilisés dans des films, à la fois devant et derrière la caméra. [27]
Marché
En 2017, 926 hélicoptères civils ont été expédiés pour 3,68 milliards de dollars, menés par Airbus Helicopters avec 1,87 milliard de dollars pour 369 giravions, Leonardo Helicopters avec 806 millions de dollars pour 102 (trois premiers quarts seulement), Bell Helicopter avec 696 millions de dollars pour 132, puis Robinson Helicopter avec 161 millions de dollars pour 305. [28]
En octobre 2018, la flotte d’hélicoptères en service et stockés de 38 570 auprès d’opérateurs civils ou gouvernementaux était dirigée par Robinson Helicopter avec 24,7% suivi par Airbus Helicopters avec 24,4%, puis Bell avec 20,5 et Leonardo avec 8,4%, Russian Helicopters avec 7,7%, Sikorsky Aircraft avec 7,2 %, MD Helicopters avec 3,4 % et autres avec 2,2 %. Le modèle le plus répandu est le piston Robinson R44 avec 5 600, puis le H125/ AS350 avec 3 600 unités, suivi du Bell 206 avec 3 400. La plupart se trouvaient en Amérique du Nord avec 34,3 %, puis en Europe avec 28,0 %, suivie de l’Asie-Pacifique avec 18,6 %, de l’Amérique latine avec 11,6 %, de l’Afrique avec 5,3 % et du Moyen-Orient avec 1,7 %. [29]
Histoire
Conception précoce
 La “vis aérienne” de Léonard
La “vis aérienne” de Léonard
Les premières références de vol vertical sont venues de Chine. Depuis environ 400 av. J.-C. [30] les enfants chinois jouent avec des jouets volants en bambou (ou toupie chinoise). [31] [32] [33] Ce bambou-hélicoptère est tourné en faisant rouler un bâton attaché à un rotor. La rotation crée une portance et le jouet vole lorsqu’il est relâché. [30] Le livre taoïste du 4ème siècle après JC Baopuzi par Ge Hong (抱朴子 “Maître qui embrasse la simplicité”) décrit censément certaines des idées inhérentes aux aéronefs à voilure tournante. [34]
Des conceptions similaires au jouet hélicoptère chinois sont apparues dans certaines peintures de la Renaissance et d’autres œuvres. [35] Au 18e et au début du 19e siècle, les scientifiques occidentaux ont développé des machines volantes basées sur le jouet chinois. [36]
Ce n’est qu’au début des années 1480, lorsque le polymathe italien Léonard de Vinci a créé une conception pour une machine qui pourrait être décrite comme une ” vis aérienne “, que tout progrès enregistré a été fait vers le vol vertical. Ses notes suggéraient qu’il construisait de petits modèles volants, mais il n’y avait aucune indication d’une quelconque disposition pour empêcher le rotor de faire tourner l’engin. [37] [38] Au fur et à mesure que les connaissances scientifiques augmentaient et devenaient plus acceptées, les gens continuaient à poursuivre l’idée du vol vertical.
En juillet 1754, le russe Mikhail Lomonossov avait développé un petit coaxial inspiré de la toupie chinoise mais alimenté par un dispositif à ressort enroulé [36] et l’avait démontré à l’ Académie russe des sciences . Il était alimenté par un ressort et a été suggéré comme méthode pour soulever les instruments météorologiques . En 1783, Christian de Launoy , et son mécanicien , Bienvenu, utilisèrent une version coaxiale de la toupie chinoise dans un modèle constitué de rémiges de dindon contrarotatives [36] comme pales de rotor, et en 1784, en firent la démonstration à l’ Académie française des sciences . Sir George Cayley, influencé par une fascination enfantine pour la toupie volante chinoise, développe un modèle de plumes, similaire à celui de Launoy et Bienvenu, mais propulsé par des élastiques. À la fin du siècle, il avait commencé à utiliser des feuilles d’étain pour les pales de rotor et des ressorts pour la puissance. Ses écrits sur ses expériences et ses modèles deviendront influents sur les futurs pionniers de l’aviation. [37] Alphonse Pénaud développera plus tard des jouets d’hélicoptère modèle à rotor coaxial en 1870, également propulsés par des élastiques. L’un de ces jouets, offert en cadeau par leur père, inspirera les frères Wright à poursuivre leur rêve de voler. [39]
 Hélicoptère expérimental par Enrico Forlanini , 1877
Hélicoptère expérimental par Enrico Forlanini , 1877
En 1861, le mot “hélicoptère” a été inventé par Gustave de Ponton d’Amécourt , un inventeur français qui a démontré un petit modèle à vapeur. Bien que célébré comme une utilisation innovante d’un nouveau métal, l’aluminium, le modèle n’a jamais décollé du sol. La contribution linguistique de D’Amecourt survivra pour finalement décrire le vol vertical qu’il avait envisagé. La puissance de la vapeur était également populaire auprès d’autres inventeurs. En 1878, le véhicule sans pilote de l’Italien Enrico Forlanini , également propulsé par une machine à vapeur, s’est élevé à une hauteur de 12 mètres (39 pieds), où il a plané pendant environ 20 secondes après un décollage vertical. La conception à vapeur d’Emmanuel Dieuaide comportait des rotors contrarotatifs alimentés par un tuyau provenant d’une chaudière au sol.Gustave Trouvé , a construit et piloté un modèle réduit d’hélicoptère électrique captif. [ citation nécessaire ]
En juillet 1901, le vol inaugural de l’hélicoptère d’ Hermann Ganswindt a lieu à Berlin-Schöneberg ; c’était probablement le premier vol motorisé plus lourd que l’air transportant des humains. Un film couvrant l’événement a été réalisé par Max Skladanowsky , mais il reste perdu . [40]
En 1885, Thomas Edison a reçu 1 000 $ US (équivalent à 30 000 $ aujourd’hui) de James Gordon Bennett, Jr. , pour mener des expériences visant à développer le vol. Edison a construit un hélicoptère et a utilisé le papier pour un symbole boursier pour créer du guncotton , avec lequel il a tenté d’alimenter un moteur à combustion interne. L’hélicoptère a été endommagé par des explosions et l’un de ses ouvriers a été grièvement brûlé. Edison a rapporté qu’il faudrait un moteur avec un rapport de trois à quatre livres par cheval-vapeur produit pour réussir, sur la base de ses expériences. [41] Ján Bahýľ , un inventeur slovaque , a adapté le moteur à combustion internepour propulser son modèle d’hélicoptère qui a atteint une hauteur de 0,5 mètre (1,6 pied) en 1901. Le 5 mai 1905, son hélicoptère a atteint 4 mètres (13 pieds) d’altitude et a volé sur plus de 1 500 mètres (4 900 pieds). [42] En 1908, Edison a fait breveter sa propre conception pour un hélicoptère actionné par un moteur à essence avec des cerfs-volants de boîte attachés à un mât par des câbles pour un rotor, [43] mais il n’a jamais volé. [44]
Premiers vols
En 1906, deux frères français, Jacques et Louis Breguet , ont commencé à expérimenter des profils aérodynamiques pour hélicoptères. En 1907, ces expériences ont abouti au Gyroplane No.1 , peut-être le premier exemple connu de quadricoptère. Bien qu’il y ait une certaine incertitude quant à la date, entre le 14 août et le 29 septembre 1907, l’ autogire n ° 1 a soulevé son pilote dans les airs à environ 0,6 mètre (2 pieds) pendant une minute. [1] L’autogire n ° 1 s’est avéré extrêmement instable et a nécessité un homme à chaque coin de la cellule pour le maintenir stable. Pour cette raison, les vols de l’Autogire n° 1 sont considérés comme le premier vol habité d’un hélicoptère, mais pas comme un vol libre ou non captif.
 L’hélicoptère de Paul Cornu, 1907
L’hélicoptère de Paul Cornu, 1907
Cette même année, son compatriote inventeur français Paul Cornu a conçu et construit l’ hélicoptère Cornu qui utilisait deux rotors contrarotatifs de 6,1 mètres (20 pieds) entraînés par un moteur Antoinette de 24 ch (18 kW) . Le 13 novembre 1907, il a soulevé son inventeur à 0,3 mètre (1 pied) et est resté en l’air pendant 20 secondes. Même si ce vol n’a pas surpassé le vol de l’autogire n° 1, il a été rapporté qu’il s’agissait du premier vol véritablement libre avec un pilote. [n 1] L’hélicoptère de Cornu a effectué quelques vols supplémentaires et atteint une hauteur de près de 2,0 mètres (6,5 pieds), mais il s’est avéré instable et a été abandonné. [1]
En 1911, le philosophe et économiste slovène Ivan Slokar a breveté une configuration d’hélicoptère. [45] [46] [47]
L’inventeur danois Jacob Ellehammer a construit l’ hélicoptère Ellehammer en 1912. Il se composait d’un châssis équipé de deux disques contrarotatifs, chacun étant équipé de six aubes autour de sa circonférence. Après des essais en intérieur, l’avion a fait l’objet d’une démonstration en extérieur et a effectué plusieurs décollages libres. Les expériences avec l’hélicoptère se sont poursuivies jusqu’en septembre 1916, date à laquelle il s’est renversé au décollage, détruisant ses rotors. [48]
Pendant la Première Guerre mondiale , l’Autriche-Hongrie a développé le PKZ , un prototype d’hélicoptère expérimental, avec deux avions construits.
Développement précoce
 Lire des médias Film muet d’un vol d’essai de l’hélicoptère de Pescara, 1922. EYE Film Institute Pays-Bas .
Lire des médias Film muet d’un vol d’essai de l’hélicoptère de Pescara, 1922. EYE Film Institute Pays-Bas .
Au début des années 1920, l’Argentin Raúl Pateras-Pescara de Castelluccio , alors qu’il travaillait en Europe, a démontré l’une des premières applications réussies du Pas cyclique. [1] Les rotors coaxiaux, contrarotatifs et biplans pourraient être déformés pour augmenter et diminuer cycliquement la portance qu’ils produisaient. Le moyeu du rotor pourrait également être incliné vers l’avant de quelques degrés, permettant à l’avion d’avancer sans hélice séparée pour le pousser ou le tirer. Pateras-Pescara a également pu démontrer le principe de l’autorotation . En janvier 1924, l’hélicoptère n ° 1 de Pescara a été testé mais s’est avéré sous-alimenté et ne pouvait pas soulever son propre poids. Son 2F s’en sort mieux et établit un record. [49]Le gouvernement britannique a financé des recherches supplémentaires par Pescara qui ont abouti à l’hélicoptère n ° 3, propulsé par un moteur radial de 250 chevaux (190 kW) qui pouvait voler jusqu’à dix minutes. [50] [51]
En mars 1923 , Time Magazine a rapporté que Thomas Edison avait envoyé au Dr George de Bothezaat des félicitations pour un vol d’essai d’hélicoptère réussi. Edison a écrit: “Pour autant que je sache, vous avez produit le premier hélicoptère réussi.” L’hélicoptère a été testé à McCook’s Field et est resté en vol pendant 2 minutes et 45 secondes à une hauteur de 15 pieds. [52]
Le 14 avril 1924, le Français Étienne Oehmichen établit le premier record du monde d’hélicoptère reconnu par la Fédération Aéronautique Internationale (FAI), pilotant son hélicoptère Quadrirotor à 360 mètres (1180 pieds). [53] Le 18 avril 1924, Pescara bat le record d’Oemichen, volant sur une distance de 736 mètres (2 415 pieds) [49] (près de 0,80 kilomètres ou 0,5 miles) en 4 minutes et 11 secondes (environ 13 km/h ou 8 mi/h), en maintenant une hauteur de 1,8 mètre (6 pieds). [54] Le 4 mai, Oehmichen a effectué le premier vol d’hélicoptère en circuit fermé d’un kilomètre (0,62 mi) en 7 minutes 40 secondes avec sa machine n ° 2. [1] [55]
Aux États-Unis, George de Bothezat a construit l’hélicoptère Quadrirotor de Bothezat pour le United States Army Air Service, mais l’armée a annulé le programme en 1924 et l’avion a été mis au rebut. [ citation nécessaire ]
Albert Gillis von Baumhauer , un ingénieur aéronautique néerlandais, a commencé à étudier la conception de giravions en 1923. Son premier prototype a «volé» («sauté» et plané dans la réalité) le 24 septembre 1925, [56] avec le capitaine de l’armée de l’air néerlandaise Floris Albert van Heijst aux commandes. Les commandes utilisées par van Heijst étaient les inventions de von Baumhauer, le cyclique et le collectif . [57] [58] Des brevets ont été accordés à von Baumhauer pour ses commandes cycliques et collectives par le ministère britannique de l’aviation le 31 janvier 1927, sous le numéro de brevet 265 272. [ citation nécessaire ]
En 1927, [59] Engelbert Zaschka d’Allemagne a construit un hélicoptère, équipé de deux rotors, dans lequel un gyroscope a été utilisé pour augmenter la stabilité et sert d’accumulateur d’énergie pour un vol plané pour effectuer un atterrissage. L’avion de Zaschka, le premier hélicoptère qui ait jamais fonctionné avec autant de succès en miniature, non seulement monte et descend verticalement, mais est capable de rester immobile à n’importe quelle hauteur. [60] [61]
En 1928, l’ingénieur aéronautique hongrois Oszkár Asbóth a construit un prototype d’hélicoptère qui a décollé et atterri au moins 182 fois, avec une durée de vol unique maximale de 53 minutes. [62] [63]
En 1930, l’ingénieur italien Corradino D’Ascanio construit son D’AT3, un hélicoptère coaxial. Sa machine relativement grande avait deux rotors à deux pales contrarotatifs. Le contrôle a été réalisé en utilisant des ailes auxiliaires ou des servo-onglets sur les bords de fuite des pales, [64] un concept qui a ensuite été adopté par d’autres concepteurs d’hélicoptères, dont Bleeker et Kaman. Trois petites hélices montées sur la cellule ont été utilisées pour un contrôle supplémentaire du tangage, du roulis et du lacet. Le D’AT3 détenait de modestes records de vitesse et d’altitude FAI pour l’époque, y compris l’altitude (18 m ou 59 pieds), la durée (8 minutes 45 secondes) et la distance parcourue (1078 m ou 3540 pieds). [64] [65]
Premier giravion pratique
L’ingénieur aéronautique et pilote espagnol Juan de la Cierva a inventé l’ autogire au début des années 1920, devenant ainsi le premier giravion pratique. [66] En 1928, de la Cierva a volé avec succès un autogire à travers la Manche, de Londres à Paris. [67] En 1934, un autogire est devenu le premier giravion à décoller et atterrir avec succès sur le pont d’un navire. [68] Cette même année, l’autogire a été employé par l’armée espagnole pendant la révolte des Asturies , devenant le premier déploiement militaire d’un giravion. Les autogyres étaient également employés dans le New Jersey et en Pennsylvaniepour livrer le courrier et les journaux avant l’invention de l’hélicoptère. [69] Bien qu’il manque une véritable capacité de vol vertical, le travail sur l’autogire constitue la base de l’analyse de l’hélicoptère. [70]
Succès d’un seul rotor de levage
En Union soviétique, Boris N. Yuriev et Alexei M. Cheremukhin, deux ingénieurs aéronautiques travaillant au Tsentralniy Aerogidrodinamicheskiy Institut (TsAGI ou Central Aerohydrodynamic Institute), ont construit et piloté l’hélicoptère à rotor de levage unique TsAGI 1-EA, qui utilisait un structure tubulaire ouverte, un rotor de levage principal à quatre pales et deux ensembles de rotors anticouple à deux pales de 1,8 mètre (5,9 pieds) de diamètre: un ensemble de deux au nez et un ensemble de deux à la queue. Propulsé par deux moteurs M-2, copies améliorées du moteur rotatif Gnome Monosoupape 9 Type B-2 de 100 CV de la Première Guerre mondiale, le TsAGI 1-EA a effectué plusieurs vols à basse altitude. [71]Le 14 août 1932, Cheremukhin réussit à amener le 1-EA à une altitude non officielle de 605 mètres (1 985 pieds), brisant la réalisation antérieure de d’Ascanio. Cependant, comme l’Union soviétique n’était pas encore membre de la FAI , le record de Cheremukhin n’était pas reconnu. [72]
Nicolas Florine , un ingénieur russe, a construit la première machine à double rotor tandem pour effectuer un vol libre. Il vola à Rhode-Saint-Genèse , au Laboratoire Aérotechnique de Belgique (aujourd’hui Institut von Karman ) en avril 1933, et atteignit une altitude de six mètres (20 pieds) et une autonomie de huit minutes. Florine a choisi une configuration co-rotative car la stabilité gyroscopique des rotors ne s’annulerait pas. Par conséquent, les rotors devaient être légèrement inclinés dans des directions opposées pour contrer le couple. L’utilisation de rotors sans charnière et la co-rotation ont également minimisé les contraintes sur la coque. À l’époque, c’était l’un des hélicoptères les plus stables qui existaient. [73]
Le Laboratoire d’Autogires Bréguet-Dorand a été construit en 1933. C’était un hélicoptère coaxial, contrarotatif. Après de nombreux essais au sol et un accident, il prend son premier vol le 26 juin 1935. En peu de temps, l’appareil établit des records avec le pilote Maurice Claisse aux commandes. Le 14 décembre 1935, il établit un record de vol en circuit fermé avec un diamètre de 500 mètres (1 600 pieds). [74] L’année suivante, le 26 septembre 1936, Claisse établit un record de hauteur de 158 mètres (518 pieds). [75] Et, enfin, le 24 novembre 1936, il établit un record de durée de vol d’une heure, deux minutes et 50 secondes [76] sur un circuit fermé de 44 kilomètres (27 miles) à 44,7 kilomètres par heure (27,8 mph). L’avion a été détruit en 1943 par un allié frappe aérienne à l’aéroport de Villacoublay . [77]
Les débuts du monorotor américain
L’inventeur américain Arthur M. Young a commencé à travailler sur des modèles d’hélicoptères en 1928 en utilisant des moteurs de vol stationnaire électriques convertis pour entraîner la tête du rotor. Young a inventé la barre stabilisatrice et l’a brevetée peu de temps après. Un ami commun a présenté Young à Lawrence Dale, qui une fois voyant son travail lui a demandé de rejoindre la société Bell Aircraft. Lorsque Young est arrivé chez Bell en 1941, il a signé son brevet et a commencé à travailler sur l’hélicoptère. Son budget était de 250 000 $ US (équivalent à 4,6 millions de dollars aujourd’hui) pour construire deux hélicoptères fonctionnels. En seulement six mois, ils ont achevé le premier Bell Model 1, qui a engendré le Bell Model 30 , plus tard remplacé par le Bell 47. [78]
Naissance d’une industrie
 Igor Sikorsky et le premier hélicoptère produit en série, le Sikorsky R-4 , 1944
Igor Sikorsky et le premier hélicoptère produit en série, le Sikorsky R-4 , 1944
Heinrich Focke de Focke-Wulf avait acheté une licence à Cierva Autogiro Company , qui, selon Frank Kingston Smith Sr. , incluait “le système de moyeu à Pas cyclique/collectif entièrement contrôlable”. En retour, Cierva Autogiro a reçu une licence croisée pour construire les hélicoptères Focke-Achgelis. Focke a conçu le premier hélicoptère birotor transversal pratique au monde , le Focke-Wulf Fw 61 , qui a volé pour la première fois en juin 1936. Le Fw 61 avait volé à plus de 8 000 pieds (2 400 m) à des vitesses de 120 miles par heure (190 km/h). h). Le développement d’Autogiro était maintenant contourné par une concentration sur les hélicoptères. [79]
Pendant la Seconde Guerre mondiale, l’Allemagne nazie a utilisé des hélicoptères en petit nombre pour l’observation, le transport et l’évacuation médicale. Le synchropter Flettner Fl 282 Kolibri – utilisant la même configuration de base que le Fl 265 pionnier d’ Anton Flettner – a été utilisé en Méditerranée, tandis que l’ hélicoptère birotor Focke Achgelis Fa 223 Drache a été utilisé en Europe. [ la citation nécessaire ] Le bombardement étendu par les forces Alliées a empêché l’Allemagne de produire n’importe quels hélicoptères dans de grandes quantités pendant la guerre.
Aux États-Unis, l’ingénieur d’origine russe Igor Sikorsky et Wynn Laurence LePage se sont affrontés pour produire le premier hélicoptère de l’armée américaine. LePage a reçu les droits de brevet pour développer des hélicoptères inspirés du Fw 61 et a construit le XR-1 . [80] Pendant ce temps, Sikorsky a opté pour une conception plus simple à rotor unique, le VS-300 , qui s’est avéré être la première conception pratique d’hélicoptère à rotor de levage unique. Après avoir expérimenté des configurations pour contrer le couple produit par le Rotor principal unique, Sikorsky a opté pour un seul rotor plus petit monté sur la poutre de queue.
Développé à partir du VS-300, le R-4 de Sikorsky a été le premier hélicoptère produit en série à grande échelle, avec une commande de production de 100 appareils. Le R-4 était le seul hélicoptère allié à servir pendant la Seconde Guerre mondiale, principalement pour la recherche et le sauvetage (par le 1st Air Commando Group de l’ USAAF ) dans la campagne de Birmanie ; [81] en Alaska ; et dans d’autres zones à terrain accidenté. La production totale a atteint 131 hélicoptères avant que le R-4 ne soit remplacé par d’autres hélicoptères Sikorsky tels que le R-5 et le R-6 . Au total, Sikorsky a produit plus de 400 hélicoptères avant la fin de la Seconde Guerre mondiale. [82]
Alors que LePage et Sikorsky construisaient leurs hélicoptères pour l’armée, Bell Aircraft a embauché Arthur Young pour aider à construire un hélicoptère utilisant la conception du rotor oscillant à deux pales de Young, qui utilisait une barre stabilisatrice lestée placée à un angle de 90 ° par rapport aux pales du rotor. L’ hélicoptère modèle 30 qui a suivi a montré la simplicité et la facilité d’utilisation de la conception. Le modèle 30 a été développé pour devenir le Bell 47 , qui est devenu le premier hélicoptère certifié pour un usage civil aux États-Unis. Produit dans plusieurs pays, le Bell 47 a été le modèle d’hélicoptère le plus populaire pendant près de 30 ans.
Âge des turbines
En 1951, à la demande de ses contacts au ministère de la Marine, Charles Kaman a modifié son synchropter K-225 – une conception pour un concept d’hélicoptère à double rotor lancé pour la première fois par Anton Flettner en 1939, avec le Fl 265 à Moteur à pistons susmentionné. conception en Allemagne – avec un nouveau type de moteur, le turbomoteur . Cette adaptation du moteur à turbine a fourni une grande quantité de puissance à l’hélicoptère de Kaman avec une pénalité de poids inférieure à celle des moteurs à pistons, avec leurs blocs moteurs lourds et leurs composants auxiliaires. Le 11 décembre 1951, le Kaman Le K-225 est devenu le premier hélicoptère à turbine au monde. Deux ans plus tard, le 26 mars 1954, un Navy HTK-1 modifié, un autre hélicoptère Kaman, est devenu le premier hélicoptère bi-turbine à voler. [83] Cependant, c’est l’ Alouette II de Sud Aviation qui deviendra le premier hélicoptère à être produit avec un moteur à turbine. [84]
Des hélicoptères fiables capables de vol stationnaire stable ont été développés des décennies après les avions à voilure fixe. Cela est largement dû aux exigences de densité de puissance des moteurs plus élevées que les aéronefs à voilure fixe. Les améliorations apportées aux carburants et aux moteurs au cours de la première moitié du 20e siècle ont été un facteur critique dans le développement des hélicoptères. La disponibilité de turbomoteurs légers dans la seconde moitié du XXe siècle a conduit au développement d’hélicoptères plus gros, plus rapides et plus performants. Alors que les hélicoptères plus petits et moins chers utilisent encore des moteurs à pistons, les turbomoteurs sont aujourd’hui le groupe motopropulseur préféré des hélicoptères.
Sécurité
Limite de vitesse maximale
 Un Kamov Ka-50 de l’armée de l’air russe utilise un système de rotor coaxial
Un Kamov Ka-50 de l’armée de l’air russe utilise un système de rotor coaxial
Il y a plusieurs raisons pour lesquelles un hélicoptère ne peut pas voler aussi vite qu’un avion à voilure fixe. Lorsque l’hélicoptère est en vol stationnaire, les pointes extérieures du rotor se déplacent à une vitesse déterminée par la longueur de la pale et la vitesse de rotation. Or, dans un hélicoptère en mouvement, la vitesse des pales par rapport à l’air dépend de la vitesse de l’hélicoptère ainsi que de leur vitesse de rotation. La vitesse anémométrique de la pale de rotor qui avance est beaucoup plus élevée que celle de l’hélicoptère lui-même. Il est possible que cette lame dépasse la vitesse du son et produise ainsi une traînée et des vibrations considérablement accrues.
En même temps, la lame qui avance crée plus de portance vers l’avant, la lame qui recule produit moins de portance. Si l’avion devait accélérer à la vitesse de l’air à laquelle les extrémités des pales tournent, la pale qui recule traverse de l’air se déplaçant à la même vitesse que la pale et ne produit aucune portance, ce qui entraîne des contraintes de couple très élevées sur l’arbre central qui peuvent renverser le côté de la lame qui recule du véhicule et provoquer une perte de contrôle. Les doubles lames contrarotatives empêchent cette situation grâce à la présence de deux lames avançantes et de deux lames reculantes avec des forces équilibrées.
Parce que la pale qui avance a une vitesse plus élevée que la pale qui recule et génère une dissymétrie de portance , les pales du rotor sont conçues pour “battre” – se soulever et se tordre de telle sorte que la pale qui avance se soulève et développe un angle d’attaque plus petit. À l’inverse, la lame qui recule s’abaisse, développe un angle d’attaque plus élevé et génère plus de portance. À grande vitesse, la force exercée sur les rotors est telle qu’ils “battent” excessivement, et la pale qui recule peut atteindre un angle trop élevé et décrocher. Pour cette raison, la vitesse avant maximale de sécurité d’un hélicoptère se voit attribuer une cote de conception appelée V NE , vitesse, ne jamais dépasser . [85]De plus, il est possible que l’hélicoptère vole à une vitesse où une quantité excessive de la pale en retrait cale, ce qui entraîne de fortes vibrations, un cabrage et un roulis dans la pale en retrait.
Bruit
Au cours des dernières années du XXe siècle, les concepteurs ont commencé à travailler sur la réduction du bruit des hélicoptères . Les communautés urbaines ont souvent exprimé une grande aversion pour l’aviation bruyante ou les avions bruyants, et les hélicoptères de police et de passagers peuvent être impopulaires à cause du bruit. Les réaménagements ont suivi la fermeture de certains héliports de la ville et l’action du gouvernement pour limiter les trajectoires de vol dans les parcs nationaux et autres lieux de beauté naturelle.
Vibration
Pour réduire les vibrations, tous les hélicoptères ont des réglages de rotor pour la hauteur et le poids. Un hélicoptère mal réglé peut facilement vibrer tellement qu’il se secoue. La hauteur de la lame est ajustée en modifiant le pas de la lame. Le poids est ajusté en ajoutant ou en enlevant des poids sur la tête du rotor et/ou sur les embouts des pales. La plupart ont également des amortisseurs de vibrations pour la hauteur et l’inclinaison. Certains utilisent également des systèmes de rétroaction mécaniques pour détecter et contrer les vibrations. Habituellement, le système de rétroaction utilise une masse comme “référence stable” et une tringlerie de la masse actionne un volet pour régler l’ angle d’attaque du rotorpour contrer les vibrations. Le réglage peut être difficile en partie parce que la mesure des vibrations est difficile, nécessitant généralement des accéléromètres sophistiqués montés dans la cellule et les boîtes de vitesses. Le système de mesure de réglage des vibrations des pales le plus courant consiste à utiliser une lampe flash stroboscopique et à observer des marques peintes ou des réflecteurs colorés sur la face inférieure des pales du rotor. Le système low-tech traditionnel consiste à monter des craies colorées sur les pointes du rotor, et à voir comment elles marquent une feuille de lin. Les systèmes de surveillance de la santé et de l’utilisation (HUMS) fournissent des solutions de surveillance des vibrations et de suivi et d’équilibrage du rotor pour limiter les vibrations. [86]Les vibrations de la boîte de vitesses nécessitent le plus souvent une révision ou un remplacement de la boîte de vitesses. Les vibrations de la boîte de vitesses ou de la transmission peuvent être extrêmement nocives pour un pilote. Les effets les plus graves sont la douleur, l’engourdissement et la perte de discrimination tactile ou de dextérité.
Perte d’efficacité du rotor de queue
Pour un hélicoptère standard avec un seul Rotor principal, les extrémités des pales du Rotor principal produisent un anneau vortex dans l’air, qui est un flux d’air en spirale et en rotation circulaire. Au fur et à mesure que l’engin avance, ces tourbillons s’éloignent derrière l’engin.
En vol stationnaire avec un vent de travers diagonal vers l’avant, ou en se déplaçant dans une direction diagonale vers l’avant, les tourbillons en rotation qui s’éloignent des pales du Rotor principal s’aligneront avec la rotation du rotor de queue et provoqueront une instabilité des commandes de vol. [87]
Lorsque les tourbillons arrière entrant en collision avec le rotor de queue tournent dans le même sens, cela provoque une perte de poussée du rotor de queue. Lorsque les tourbillons arrière tournent dans la direction opposée du rotor de queue, la poussée est augmentée. L’utilisation des pédales est nécessaire pour régler l’angle d’attaque du rotor de queue, afin de compenser ces instabilités.
Ces problèmes sont dus au fait que le rotor de queue exposé traverse l’air libre autour de l’arrière du véhicule. Ce problème disparaît lorsque la queue est à la place canalisée, en utilisant une roue interne enfermée dans la queue et un jet d’air haute pression latéralement hors de la queue, car les tourbillons du Rotor principal ne peuvent pas avoir d’impact sur le fonctionnement d’une roue interne.
Azimut critique du vent
Pour un hélicoptère standard avec un seul Rotor principal, le maintien d’un vol stable avec un vent de travers présente un problème de contrôle de vol supplémentaire, où de forts vents de travers sous certains angles augmenteront ou diminueront la portance des rotors principaux. Cet effet est également déclenché en l’absence de vent lors du déplacement de l’engin en diagonale dans différentes directions, en fonction du sens de rotation du Rotor principal. [88]
Cela peut entraîner une perte de contrôle et un crash ou un atterrissage dur lors de l’utilisation à basse altitude, en raison de la perte soudaine et inattendue de portance, et du temps et de la distance insuffisants disponibles pour récupérer.
Transmission
Les aéronefs à voilure tournante conventionnels utilisent un ensemble de boîtes de vitesses mécaniques complexes pour convertir la vitesse de rotation élevée des turbines à gaz en la faible vitesse requise pour entraîner les rotors principal et de queue. Contrairement aux groupes motopropulseurs, les boîtes de vitesses mécaniques ne peuvent pas être dupliquées (pour la redondance) et ont toujours été un point faible majeur de la fiabilité des hélicoptères. Les défaillances catastrophiques des engrenages en vol entraînent souvent un blocage de la boîte de vitesses et des décès ultérieurs, tandis qu’une perte de lubrification peut déclencher un incendie à bord. [ citation nécessaire ] Une autre faiblesse des boîtes de vitesses mécaniques est leur limitation de puissance transitoire, en raison des limites de fatigue structurelle. Des études récentes de l’AESA indiquent que les moteurs et les transmissions sont la principale cause d’accidents juste après des erreurs de pilotage. [89]
En revanche, les transmissions électromagnétiques n’utilisent aucune pièce en contact ; par conséquent, la lubrification peut être considérablement simplifiée ou éliminée. Leur redondance inhérente offre une bonne résilience au point de défaillance unique. L’absence d’engrenages permet des transitoires de forte puissance sans impact sur la durée de vie. Le concept de propulsion électrique appliqué à l’hélicoptère et à l’entraînement électromagnétique a été concrétisé par Pascal Chrétien qui a conçu, construit et piloté le premier hélicoptère électrique transportant des hommes et volant librement. Le concept est passé du modèle conceptuel de conception assistée par ordinateur le 10 septembre 2010 aux premiers tests à 30% de puissance le 1er mars 2011 – moins de six mois. L’avion a volé pour la première fois le 12 août 2011. Tout le développement a été réalisé à Venelles, en France. [90][91]
Dangers
 Le Rotor principal d’ un Eurocopter AS350 a heurté le flanc d’une montagne alors qu’il se trouvait à basse altitude
Le Rotor principal d’ un Eurocopter AS350 a heurté le flanc d’une montagne alors qu’il se trouvait à basse altitude
Comme pour tout véhicule en mouvement, une utilisation dangereuse peut entraîner une perte de contrôle, des dommages structurels ou la mort. Voici une liste de certains des dangers potentiels pour les hélicoptères :
- La stabilisation avec puissance se produit lorsque l’avion n’a pas suffisamment de puissance pour arrêter sa descente. Ce danger peut évoluer vers un état d’anneau Vortex s’il n’est pas corrigé tôt. [92]
- L’état de l’ anneau vortex est un danger induit par une combinaison de vitesse faible, de réglage de puissance élevé et de taux de descente élevé. Les tourbillons à l’extrémité du rotor circulent de l’air à haute pression sous le disque du rotor vers l’air à basse pression au-dessus du disque, de sorte que l’hélicoptère s’installe dans son propre flux d’air descendant. [92] Ajouter plus de puissance augmente le taux de circulation de l’air et aggrave la situation. Il est parfois confondu avec le réglage avec puissance, mais ils sont aérodynamiquement différents.
- Le décrochage des pales en recul se produit lors d’un vol à grande vitesse et constitue le facteur limitant le plus courant de la vitesse d’avancement d’un hélicoptère.
- La résonance au sol est une vibration auto-entretenue qui se produit lorsque l’espacement avance/retard des pales d’un système de rotor articulé devient irrégulier.
- La condition de faible G est un changement brusque d’un état de force G positif à un état de force G négatif qui entraîne une perte de portance (disque déchargé) et un retournement ultérieur. Si le cyclique arrière est appliqué alors que le disque est déchargé, le Rotor principal pourrait heurter la queue et provoquer une défaillance catastrophique. [93]
- Renversement dynamique dans lequel l’hélicoptère pivote autour de l’un des patins et se «tire» sur le côté (presque comme une boucle au sol d’un aéronef à voilure fixe ).
- Défaillances du groupe motopropulseur , en particulier celles qui se produisent dans la zone ombrée du diagramme hauteur-vitesse .
- Défaillances du rotor de queue qui résultent soit d’un dysfonctionnement mécanique du système de commande du rotor de queue, soit d’une perte d’autorité de poussée du rotor de queue, appelée «perte d’efficacité du rotor de queue» (LTE).
- Baisse de tension dans des conditions poussiéreuses ou voile blanc dans des conditions enneigées.
- Le bas régime du rotor, c’est lorsque le moteur ne peut pas entraîner les pales à un régime suffisant pour maintenir le vol.
- Survitesse du rotor, qui peut surcharger les paliers de pas du moyeu du rotor (brinelling) et, si elle est suffisamment grave, provoquer une séparation des pales de l’avion.
- Impacts de câbles et d’arbres dus à des opérations à basse altitude et à des décollages et atterrissages dans des endroits éloignés. [94]
- Vol contrôlé vers le terrain au cours duquel l’aéronef s’écrase involontairement au sol en raison d’un manque de conscience de la situation.
- Cognement de mât dans certains hélicoptères [95]
Liste des accidents mortels
| Date | Opérateur | Avion | Événement et lieu | Bilan des morts |
|---|---|---|---|---|
| 19 août 2002 | Russie | Mil Mi-26 | Abattu au-dessus de la Tchétchénie | 127 [96] |
| 9 décembre 1982 | Nicaragua | Mil Mi-8 | Abattu par des rebelles du Sandinistan alors qu’il transportait 88 personnes. Les 84 passagers ont été tués et les quatre membres d’équipage ont survécu. [97] | 84 |
| 4 février 1997 | Israël | Étalon des mers Sikorsky CH-53 (x2) | Collision au-dessus d’Israël | 73 |
| 14 décembre 1992 | Russie (armée de l’air russe) | Mil Mi-8 | Abattu par les forces géorgiennes en Abkhazie à l’aide de MANPAD SA-14 , malgré une forte escorte. Trois membres d’équipage et 58 passagers, composés principalement de réfugiés russes. [98] | 61 |
| 4 octobre 1993 | Géorgie | Mil Mi-8 | Abattu lors du transport de 60 réfugiés de l’est de l’Abkhazie; tous à bord ont été tués. [98] [ échec de la vérification ] | 60 |
| 10 mai 1977 | Israël | CH-53 | Crash près de Yitav dans la vallée du Jourdain | 54 |
| 8 janvier 1968 | États-Unis | Étalon de mer Sikorsky CH-53A , USMC | Crash près de la base de combat de Đông Hà au Sud-Vietnam . Les cinq membres d’équipage et 41 passagers ont été tués. | 46 [99] |
| 11 juillet 1972 | États-Unis | Étalon de mer Sikorsky CH-53D , USMC | Abattu par missile près de Quảng Trị au Sud-Vietnam. Six Marines américains et 50 Marines vietnamiens à bord. Trois Marines américains et 43 Marines vietnamiens ont été tués. | 46 [100] |
| 11 septembre 1982 | États-Unis | Boeing CH-47 Chinook , armée américaine | Crash lors d’un meeting aérien à Mannheim , alors situé en Allemagne de l’Ouest . | 46 [101] |
| 6 novembre 1986 | Hélicoptères internationaux britanniques | Boeing 234LR Chinook | Crash aux îles Shetland | 45 |
| 28 janvier 1992 | Azerbaïdjan | Mil Mi-8 | Abattre | 44 |
| 3 juillet 2009 | Pakistan (armée pakistanaise) | Mil Mi-17 | Accident | 41 |
| 6 août 2011 | États-Unis | CH-47 Chinook | Abattage , Afghanistan | 38 [102] |
| 18 août 1971 | États-Unis | CH-47 Chinook, armée américaine | Crash près de Pegnitz , alors situé en Allemagne de l’Ouest. Les quatre membres d’équipage et 33 passagers ont été tués. | 37 [103] |
| 26 janvier 2005 | États-Unis | Sikorsky CH-53E Super Étalon , USMC | Crash s’est posé près d’ Ar Rutbah , en Irak | 31 [104] |
Record du monde
| Type d’enregistrement | Record | Hélicoptère | Pilote(s) | Date | Emplacement | Noter | Référence |
|---|---|---|---|---|---|---|---|
| La vitesse | 400,87 km/h (249,09 mi/h) | Lynx du Westland | John Trevor Egginton (Royaume-Uni) | 11 août 1986 | ROYAUME-UNI | [105] | |
| Distance sans atterrissage | 3 561,55 km (2 213,04 mi) | Hugues YOH-6A | Robert G. Ferry (États-Unis) | 6 avril 1966 | États-Unis | [106] | |
| Vitesse autour du monde | 136,7 km/h (84,9 mi/h) | Agusta A109S Grand | Scott Kasprowicz (États-Unis) | 18 août 2008 | De et vers New York via l’Europe, la Russie, l’Alaska, le Canada |
Pas de ravitaillement en vol | [107] |
| Altitude la plus élevée sans charge utile | 12 442 m (40 820 pi) | Lama Aérospatiale | Jean Boulet (France) | 21 juin 1972 | France | [108] | |
| Altitude de vol la plus élevée | 11010 m (36120 pieds) | Sikorsky CH-54 Tarhé | Église James K. | 4 novembre 1971 | États-Unis | [109] | |
| Altitude avec une charge utile de 40 tonnes | 2255 m (7398 pieds) | Mil V-12 | Vasily Kolochenko, et al. | 6 août 1969 | URSS | [110] | |
| Décollage le plus élevé (turbine) | 8848 m (29029 pieds) | Eurocoptère AS350 | Didier Delsalle | 14 mai 2005 | Népal | Mont Everest | [111] |
| Décollage le plus haut (piston) | 4300,7 m (14110 pieds) | Robinson R44 | Marc Jeune | 12 octobre 2009 | États-Unis | Pike’s Peak, Colorado | [112] |
| Premier vol électrique habité | Vol stationnaire purement électrique | Prototype de solution F | Pascal Chrétien | 12 août 2011 | France | Venelles | [113] |
| Ascenseur à propulsion humaine le plus long | Pédaler, lever 64 s d’endurance, 3,3 m de hauteur ; largeur diagonale : 46,9 m | AeroVelo Atlas , 4 rotors | Dr Todd Reichert | 13 juin 2013 | Canada | Stade de football en salle ; Lauréat du concours Igor I. Sikorsky | [114] |
Voir également
-
![]()
![]() Portail aéronautique
Portail aéronautique
- Hélicoptère sac à dos
- Cyclogyre
- Chargement du disque
- Girodyne
- Dynamique de l’hélicoptère
- Diagramme hauteur-vitesse de l’hélicoptère
- Constructeur d’hélicoptères
- Formation d’évasion sous-marine en hélicoptère
- Écrou de Jésus , le gros écrou central supérieur qui maintient le rotor sur
- Liste des compagnies aériennes d’hélicoptères
- Liste des giravions
- Monocoptère
- Effet d’écoulement transversal
- Hélicoptère utilitaire
- Système de protection anti-grève fil “WSPS” pour hélicoptères
Références
Remarques
- ^ Leishman, Dr J. Gordon, membre technique d’AHS International. “Papier.” Archivé le 1er octobre 2008 au 64e Forum annuel Wayback Machine de l’ American Helicopter Society International , sur la capacité aérodynamique de la conception de Cornu, arguant que l’avion n’avait pas la puissance et la charge du rotor pour se décoller du sol en vol habité.
Notes de bas de page
- ^ un bcde Munson 1968 . _
- ^ Hirschberg, Michael J. et David K. Dailey, “Sikorsky” Archivé le 18 décembre 2007 à la Wayback Machine . Développement des hélicoptères américains et russes au XXe siècle, American Helicopter Society, International. 7 juillet 2000.
- ^ GEN ἕλικος helikos (le κ étant romanisé comme un c ); voir ἕλιξ et ἕλιξ (comme adjectif) . Liddell, Henry George ; Scott, Robert ; Un lexique grec-anglais au projet Perseus .
- ^ πτερόν dans Liddell et Scott .
- ^ Harper, Douglas. “hélicoptère” . Dictionnaire d’étymologie en ligne .
- ^ “hélicoptère” . Le dictionnaire gratuit . Archivé de l’original le 31 octobre 2014 . Récupéré le 30 octobre 2014 .
- ^ Cottez 1980, p. 181.
- ^ NASA.gov
- ^ Frawley 2003, p. 151.
- ^ “Méthodes de contrôle de lacet d’hélicoptère” . aerospaceweb.org . Archivé de l’original le 19 septembre 2015 . Récupéré le 1er avril 2015 .
- ^ “Kawasaki teste avec succès l’hélicoptère sans pilote propulsé par Ninja H2R” . UASweekly.com . 29 octobre 2020.
- ^ “Le concept EcoJet de Jay Leno.” Archivé le 28 septembre 2008 sur Wayback Machine businessweek.com , 2 novembre 2006. Récupéré le 12 décembre 2010.
- ^ Skinner, Tony. “Eurosatory 2010 : L’industrie célèbre le premier vol de biocarburant en hélicoptère.” shephard.co.uk, 17 juin 2010. Consulté le 12 décembre 2010.
- ^ Croucher, Phil. Études de pilote d’hélicoptère professionnel Archivé le 27 novembre 2015 à la Wayback Machine page 2-11. ISBN 978-0-9780269-0-5 . Citation : [La vitesse du rotor] “est constante dans un hélicoptère”.
- ^ Johnson, Pam. Delta D2 Archivé le 16 février 2011 à la Wayback Machine page 44 Pacific Wings . Récupéré le 2 janvier 2010
- ^ “Hélicoptères.” Archivé le 11 juillet 2011 au Wayback Machine Helicopter Vietnam . Récupéré : 16 février 2011.
- ^ L’ UH-60 autorise 95 à 101% de limites de RPM du rotor UH-60 Archivé le 18 août 2016 à la Wayback Machine US Army Aviation . Récupéré le 2 janvier 2010
- ^ John M. Seddon, Simon Newman. Basic Helicopter Aerodynamics Archivé le 30 avril 2016 à la Wayback Machine p216, John Wiley and Sons , 2011. Récupéré le 25 février 2012. ISBN 1-119-99410-1 . Citation : “Le rotor est mieux servi en tournant à une vitesse de rotor constante”
- ^ Kenneth Munson; Helicopters: And Other Rotorcraft since 1907 , Blandford, édition révisée 1973, pp.55,144-5.
- ^ Lombardi, Frank (avril 2015). “Sous le chapiteau” . Rotor et aile . p. 48. Archivé de l’original le 13 avril 2015 . Récupéré le 12 avril 2015 .
- ^ “Écoles de formation de pilote d’hélicoptère, carrières – Heliventures” . heliventuresnc.com . Archivé de l’original le 2 avril 2015 . Récupéré le 1er avril 2015 .
- ^ Day, Dwayne A. “Skycranes” Archivé le 4 février 2014 à la Wayback Machine . Commission du centenaire de l’aviation. Récupéré le 1er octobre 2008.
- ^ Webster, LF Le dictionnaire Wiley du génie civil et de la construction . New York : Wiley, 1997. ISBN 0-471-18115-3 .
- ^ Butler, Bret W. et al. “Annexe A : Glossaire : Comportement du feu associé à l’incendie de 1994 dans le sud du canyon sur Storm King Mountain, document de recherche du Colorado.” Archivé le 2 octobre 2008 au Wayback Machine U.S. Dept. of Agriculture, Forest Service, septembre 1998. Récupéré le 2 novembre 2008.
- ^ Kay, Marcia Hillary. ” 40 Years Retrospective: It’s Been a Wild Ride “ Rotor & Wing , août 2007. Consulté le 8 juin 2014. Archivé le 8 juin 2014 sur la Wayback Machine .
- ^ s/o, s/o (11 mai 2018). “La Nasa enverra un hélicoptère sur Mars pour tester un vol d’un autre monde” . BBC . Archivé de l’original le 6 juillet 2018 . Récupéré le 11 mai 2018 .
- ^ “Inaction rotatoire” . rotaryaction.com. Archivé de l’original le 7 octobre 2014 . Récupéré le 27 octobre 2021 .
- ^ “GAMA General Aviation Shipment Report 2017” (PDF) . Association des fabricants d’aviation générale. 21 février 2018. Archivé de l’original (PDF) le 4 mars 2018 . Récupéré le 4 mars 2018 .
- ^ “Rapport sur le marché des hélicoptères Q3 2018” . Flightglobal . 17 octobre 2018. Archivé de l’original le 18 octobre 2018 . Récupéré le 18 octobre 2018 .
- ^ un b Leishman, J. Gordon. Principes de l’aérodynamique des hélicoptères . Série aérospatiale de Cambridge, 18. Cambridge : Cambridge University Press , 2006. ISBN 978-0-521-85860-1 . “Copie archivée” . Archivé de l’original le 13 juillet 2014 . Récupéré le 15 juillet 2014 . {{cite web}}: Maint CS1 : copie archivée comme titre ( lien )Extrait Web
- ^ “Histoire des premiers hélicoptères”. Archivé le 5 décembre 2004 sur Wayback Machine Aerospaceweb.org. Récupéré: 12 décembre 2010
- ^ Prendre son envol: Inventer l’ère aérienne, de l’Antiquité à la Première Guerre mondiale . Presse universitaire d’Oxford. 8 mai 2003. p. 22–23. ISBN 978-0-19-516035-2.
- ^ Gobel, Greg. “L’invention de l’hélicoptère” . VectorSite.net . Archivé de l’original le 29 juin 2011 . Récupéré le 11 novembre 2008 .
- ^ Fay, John. “Pionniers de l’hélicoptère – Evolution des aéronefs à voilure tournante.” Archivé le 7 novembre 2006 sur le site d’histoire de l’hélicoptère Wayback Machine . Récupéré: 28 novembre 2007
- ^ Donald F. Lach . (1977). L’Asie en train de faire l’Europe. Volume II, A Century of Wonder Archivé le 15 septembre 2015 à la Wayback Machine . p. 403
- ^ un bc Leishman , J. Gordon (2006). Principes de l’aérodynamique des hélicoptères Archivé le 25 septembre 2015 à la Wayback Machine . La presse de l’Universite de Cambridge. p. 8. ISBN 0-521-85860-7
- ^ un bc Rumerman , Judy. “Technologie des premiers hélicoptères.” Archivé le 20 février 2014 à la Wayback Machine Centennial of Flight Commission , 2003. Récupéré le 12 décembre 2010
- ^ Pilotfriend.com “La vis à air hélicoïdale de Léonard de Vinci.” Archivé le 24 septembre 2015 sur Wayback Machine Pilotfriend.com . Récupéré le 12 décembre 2010
- ^ “Les frères Wright inventifs” (PDF) . Bibliothèque du Congrès . Archivé (PDF) de l’original le 18 octobre 2017 . Récupéré le 29 décembre 2017 .
- ^ “Moments dans l’histoire de l’hélicoptère (9) – Hermann Ganswindt” . helikopterhysteriezwo.blogspot.jp . Archivé de l’original le 10 août 2016 . Récupéré le 23 mai 2016 .
- ^ Bryan, George S. Edison : l’homme et son travail . New York: Garden City Publishers, 1926. p. 249
- ^ “Pionniers – 1900/1930.” Archivé le 4 mai 2007 sur le site d’histoire de l’hélicoptère Wayback Machine . Récupéré: 3 mai 2007
- ^ “Brevet US970616 – Machine volante” . Archivé de l’original le 13 avril 2016 . Récupéré le 30 mars 2016 .
- ^ Dowd, George L. “Flops d’inventeurs célèbres”. Popular Science , décembre 1930
- ^ Slovenska akademija znanosti dans umetnosti. “Slokar, Ivan (1884–1970)” . Archivé de l’original le 4 mars 2016 . Récupéré le 30 mars 2016 .
- ^ Občina Ajdovščina. “Ivan Slokar – letalski izumitelj, gospodarstvenik, jezikoslovec (1884–1970)” . Archivé de l’original le 4 mars 2016 . Récupéré le 30 mars 2016 .
- ^ Sto slovenskih znanstvenikov, zdravnikov in tehnikov (Bibliothèque ouverte) . OL 19750086M .
- ^ Taylor, Encyclopédie de l’aviation de Michael JH Jane , p. 348. Londres : Studio Editions, 1989.
- ^ a b ” ID d’enregistrement FAI # 13094 – Distance en ligne droite. Classe E ancien G (Hélicoptères), piston Archivé le 6 octobre 2014 à la Wayback Machine ” Fédération Aéronautique Internationale (FAI). Récupéré : 21 septembre 2014.
- ^ Bonnier Corporation (mars 1931). “Le nouvel hélicoptère monte en vol vertical” . Sciences populaires . Société Bonnier. p. 70.
- ^ Hearst Magazines (mars 1931). “Mécanique populaire” . Sciences populaires . Hears Magazines. p. 460.
- ^ “Un hélicoptère réussi” . Magazine du temps . New York : Time Inc. 3 mars 1923. p. 23 . Récupéré le 2 mars 2021 .
- ^ ” FAI Record ID # 13093 – Distance en ligne droite. Classe E ancien G (Hélicoptères), piston Archivé le 5 mars 2016 à la Wayback Machine “ Fédération Aéronautique Internationale (FAI). Récupéré : 21 septembre 2014.
- ^ Rumerman, Judy. “Développement des hélicoptères au début du XXe siècle” Archivé le 20 février 2014 sur la Wayback Machine . Commission du centenaire de l’aviation. Récupéré le 28 novembre 2007.
- ^ Le JAviator Quadrotor – Rainer KL Trummer, Université de Salzbourg, Autriche, 2010, p. 21
- ^ Relly Victoria Petrescu et Florian Ioon Petrescu L’histoire de l’aviation , p. 74. États-Unis, 2013, ISBN 978-3-8482-6639-5 .
- ^ HJGC Vodegel et KP Jessurun. Un examen historique de deux hélicoptères conçus aux Pays-Bas . 21e Forum européen du Rotocraft, 1995, Saint-Pétersbourg, Russie. extrait web [ lien mort permanent ]
- ^ Alex de Voogt. La transmission de la technologie des hélicoptères, 1920-1939 : échanges avec von Baumhauer . Int. j. pour l’histoire de l’ing. & tech., Vol. 83 n° 1, janvier 2013, 119–40. extrait web
- ^ “Musée National de l’Air et de l’Espace Smithsonian Washington: Hélicoptère Zaschka (1927) ” . Archivé de l’original le 29 mai 2016 . Récupéré le 11 novembre 2016 .
- ^ “L’avion allemand promet de nouvelles cascades dans l’air, l’abeille. Danville, Virginie, États-Unis, 25 juin 1927, p. 16” .
- ^ Engelbert Zaschka | The Zaschka Innovation (18 mai 2016), HD Engelbert Zaschka – ein Universalgenie und Erfinder: Musik, Fahrzeuge & Flugzeuge [SWR-Doku 2016] , archivé de l’original le 6 novembre 2016 , récupéré le 11 novembre 2016
- ^ “Asboth Hélicoptère.” Archivé le 25 novembre 2011 à la Wayback Machine The Evening Post (Nouvelle-Zélande) , 27 avril 1935.
- ^ Le premier hélicoptère hongrois (1929) sur YouTube Récupéré : 12 décembre 2010.
- ^ un b Spenser 1998
- ^ ” FAI Record ID # 13086 – Distance en ligne droite. Classe E ancien G (Hélicoptères), piston Archivé le 22 décembre 2015 à la Wayback Machine “ Fédération Aéronautique Internationale (FAI). Récupéré : 21 septembre 2014.
- ^ Wayne Johnson, Rotorcraft Aeromechanics, Cambridge University Press, p. 19 (2013)
- ^ “Channel Flight By Autogiro. Le succès de l’aviateur espagnol” . Le Times (45002). Londres. 19 septembre 1928. col F, p. 14.
- ^ “Le premier Dedalo était un navire de transport d’avions et le premier au monde à partir duquel un autogire a décollé et atterri.” Naval Ship Systems Command, États-Unis: Nouvelles techniques du Naval Ship Systems Command.1966, v. 15–16, p. 40
- ^ Pulle, Matt (5 juillet 2007). « Coureur de lame ». Observateur de Dallas. 27 (27). Dallas, Texas. p. 19–27.
- ^ Johnson, Wayne. Aéromécanique des giravions , p. 21. Cambridge University Press, 2013.
- ^ Cheryomukhin TsAGI 1-EA (ЦАГИ 1-ЭА) premier hélicoptère soviétique . 30 avril 2012. Archivé de l’original le 29 août 2016 . Récupéré le 30 mars 2016 – via YouTube.
- ↑ Savine, Alexandre. “TsAGI 1-EA.” Archivé le 26 janvier 2009 sur Wayback Machine ctrl-c.liu.se, 24 mars 1997. Récupéré le 12 décembre 2010.
- ^ Watkinson 2004, p. 358.
- ^ ” FAI Record ID # 13059 – Distance en ligne droite. Classe E ancien G (Hélicoptères), piston Archivé le 22 décembre 2015 à la Wayback Machine “ Fédération Aéronautique Internationale (FAI). Récupéré : 21 septembre 2014.
- ^ ” FAI Record ID # 13084 – Altitude. Classe E ancien G (Hélicoptères), piston Archivé le 7 février 2015 à la Wayback Machine “ Fédération Aéronautique Internationale (FAI). Récupéré : 21 septembre 2014.
- ^ ” FAI Record ID # 13062 – Durée en circuit fermé. Classe E ancien G (Hélicoptères), piston Archivé le 7 mars 2016 à la Wayback Machine “ Fédération Aéronautique Internationale (FAI). Récupéré : 21 septembre 2014.
- ^ Day, Dwayne A. ” Jacques Bréguet—Gyroplane-Laboratoire Archivé le 24 février 2014 à la Wayback Machine “. Paragraphe 10. Centenaire de l’aviation. Récupéré le 24 septembre 2015.
- ^ “Avions américains : Bell” . aerofiles.com. 20 avril 2009. Archivé de l’original le 2 janvier 2010 . Récupéré le 23 décembre 2009 .
- ^ Forgeron, Frank (1981). L’héritage des ailes ; L’histoire de Harold F. Pitcairn . New York : Jason Aronson, Inc. p. 253-254. ISBN 0876684851.
- ^ Francillon 1997
- ^ Sikorsky R-4B Hoverfly Archivé le 3 décembre 2013 à la Wayback Machine
- ^ Jour, Dwayne A. “Igor Sikorsky – VS 300.” Archivé le 20 février 2014 à la Wayback Machine Centennial of Flight Commission , 2003. Récupéré le 9 décembre 2007.
- ^ “Hélicoptère bi-turbotor.” Archivé le 15 septembre 2015 à la Wayback Machine Popular Mechanics , août 1954, p. 139.
- ^ Connor, DR; Lee, RE (27 juillet 2001). “Kaman K-225” . Musée national de l’air et de l’espace du Smithsonian . Archivé de l’original le 1er janvier 2008 . Récupéré le 9 décembre 2007 .
- ^ Manuel de vol de giravion 2007, pp. 3–7.
- ^ “HUMS: Plus seulement pour le fer lourd” . Association internationale des hélicoptères . Récupéré le 3 décembre 2020 .
- ^ Perte d’efficacité du rotor de queue Archivé le 4 juin 2016 à la Wayback Machine , Dynamic Flight Inc. Consulté le 11 mai 2016.
- ^ Tours de pédale d’hélicoptère, LTE et l’azimut critique du vent Archivé le 4 juin 2016 à la Wayback Machine , Helicopter Flight Inc, consulté le 11 mai 2016.
- ^ “EASA-Annual-Safety-Review-2011” (PDF) . Archivé (PDF) de l’original le 24 mars 2014 . Récupéré le 18 mai 2013 .
- ^ “Les défis de l’hybridation des aéronefs” . IDTechEx. Archivé de l’original le 24 mars 2014 . Récupéré le 29 avril 2013 .
- ^ “Vertiflite, mars / avril 2012 – Boutique en ligne AHS” . Vtol.org. Archivé de l’original le 24 mars 2014 . Récupéré le 28 avril 2013 .
- ^ un b “Modèle pour l’Influence d’État d’Anneau de Vortex sur la Dynamique de Vol de Rotorcraft” (PDF) . Archivé (PDF) de l’original le 25 février 2014 . Récupéré le 22 février 2014 .
- ^ “Avis de sécurité SN-11” (PDF) . Compagnie d’hélicoptères Robinson . Octobre 1982. Archivé de l’original (PDF) le 11 août 2013 . Récupéré le 22 février 2014 .
- ^ “Accidents d’hélicoptère à Hawaï.” Archivé le 10 janvier 2016 sur Wayback Machine kauaihelicoptertoursafety.com . Récupéré : 12 décembre 2010.
- ^ RFH de la FAA, pages 11-10
- ^ “Tchétchène obtient la vie pour avoir tué 127 soldats russes” . theguardian.com . Récupéré le 12 novembre 2021 .
- ^ “Détails de l’accident (crash du Mi-8 au Nicaragua en 1982)” . PlaneCrashInfo.com. Archivé de l’original le 29 novembre 2017 . Récupéré le 13 avril 2018 .
- ^ un b Cooper, Tom (29 septembre 2003). “Géorgie et Abkhazie, 1992–1993: la guerre de Datchas” . acig.org. Archivé de l’original le 3 mars 2008 . Récupéré le 12 décembre 2010 .
- ^ “Occurrence ASN Wikibase # 76027” . Réseau de sécurité aérienne . Récupéré le 4 octobre 2017 .
- ^ “Date de l’incident 19720711 HMM-165 CH-53D 156658+ – Feu hostile” . Association des hélicoptères de combat du Corps des Marines (via popasmoke) . Récupéré le 9 février 2020 .
- ^ “Crash Death, 3e en 8 ans, ne devrait pas arrêter les futurs spectacles” . Los Angeles Times . 3 mai 1993. Archivé de l’original le 6 décembre 2010 . Récupéré le 12 décembre 2010 .
- ^ “31 soldats américains, 7 Afghans tués en tant qu’insurgés dans l’hélicoptère de l’OTAN” . LA fois . 6 août 2011. Archivé de l’original le 7 août 2011 . Récupéré le 6 août 2011 .
- ^ “Le 2e bataillon, le 4e régiment d’infanterie honore 33 des leurs” . dvids . Récupéré le 10 février 2020 .
- ^ “Date de l’incident 050126 HMH-361 CH-53D – BuNo inconnu – incident non encore classé – près d’Ar Rutbah, Irak” . Association des hélicoptères de combat du Corps des Marines (via popasmoke). 20 novembre 2007. Archivé de l’original le 2 juillet 2010 . Récupéré le 12 décembre 2010 .
- ^ “Fichier d’enregistrement n°11659” . Fédération Aéronautique Internationale . Archivé de l’original le 3 décembre 2013 . Récupéré le 5 juin 2013 .
- ^ “Fichier d’enregistrement n°784” . Fédération Aéronautique Internationale . Archivé de l’original le 5 janvier 2015 . Récupéré le 5 juin 2013 .
- ^ “Fichier d’enregistrement n°15171” . Fédération Aéronautique Internationale . Archivé de l’original le 5 janvier 2015 . Récupéré le 5 juin 2013 .
- ^ “Fichier d’enregistrement n°754” . Fédération Aéronautique Internationale . Archivé de l’original le 3 décembre 2013 . Récupéré le 10 septembre 2013 .
- ^ “Fichier d’enregistrement n°9918” . Fédération Aéronautique Internationale . Archivé de l’original le 5 janvier 2015 . Récupéré le 5 juin 2013 .
- ^ “Fichier d’enregistrement n°9917” . Fédération Aéronautique Internationale . Archivé de l’original le 5 janvier 2015 . Récupéré le 5 juin 2013 .
- ^ “Fichier d’enregistrement n°11597” . Fédération Aéronautique Internationale . Archivé de l’original le 5 janvier 2015 . Récupéré le 17 août 2012 .
- ^ “Fichier d’enregistrement n°15629” . Fédération Aéronautique Internationale . Archivé de l’original le 5 janvier 2015 . Récupéré le 17 août 2012 .
- ^ “Premier hélicoptère électrique” . Record du monde Guinness . Archivé de l’original le 17 avril 2014 . Récupéré le 4 août 2011 .
- ^ “Vidéo: les Canadiens gagnent un prix de 250 000 $ non réclamé depuis longtemps pour un hélicoptère à pédales” . John Stevenson . 22 juillet 2013. Archivé de l’original le 7 mars 2014 . Récupéré le 6 février 2014 .
Bibliographie
- Chiles, James R. The God Machine : Des Boomerangs aux Black Hawks : L’histoire de l’hélicoptère . New York: Bantam Books, 2007. ISBN 0-553-80447-2 .
- Cottez, Henri. Dictionnaire des structures du vocabulaire savant . Paris : Les Usuels du Robert. 1980. ISBN 0-85177-827-5 .
- Francillon, René J. McDonnell Douglas Avions depuis 1920 : Volume II . Londres : Putnam, 1997. ISBN 0-85177-827-5 .
- Frawley, Gérard. Le Répertoire international des aéronefs civils, 2003–2004 . Fyshwick, Canberra, Act, Australie : Aerospace Publications Pty Ltd., 2003, p. 155. ISBN 1-875671-58-7 .
- Munson, Kenneth. Hélicoptères et autres giravions depuis 1907 . Londres: Blandford Publishing, 1968. ISBN 978-0-7137-0493-8 .
- Manuel de vol des giravions. Washington : Skyhorse Publishing, Inc., 2007. ISBN 1-60239-060-6 .
- Manuel de vol de giravion : Manuel FAA H-8083-21. . Washington, DC : Administration fédérale de l’aviation (Division des normes de vol), Département américain des transports, 2001. ISBN 1-56027-404-2 .
- Thicknesse, P. Military Rotorcraft (série Brassey’s World Military Technology). Londres: Brassey’s, 2000. ISBN 1-85753-325-9 .
- Watkinson, John. Art de l’hélicoptère. Oxford: Elsevier Butterworth-Heinemann, 2004. ISBN 0-7506-5715-4
- Wragg, David W. Hélicoptères en guerre: Une histoire illustrée . Londres : R. Hale, 1983. ISBN 0-7090-0858-9 .
- Zaschka, Engelbert . Drehflügelflugzeuge. Trag- und Hubschrauber . Berlin-Charlottenburg : CJE Volckmann Nachf. E. Wette, 1936. OCLC 20483709 .
Liens externes
| Wikimedia Commons a des médias liés aux hélicoptères . |
| Recherchez hélicoptère dans Wiktionary, le dictionnaire gratuit. |
- “www.helicopterpage.com – How Helicopters Work” Site complet expliquant les différents aspects des hélicoptères et leur fonctionnement.
- “Avions qui vont droit vers le haut.” Article de 1935 sur le développement précoce et la recherche sur les hélicoptères.
- “Vols – de l’imagination.” Article de 1918 sur les concepts de conception d’hélicoptères.
- “Twin Windmill Blades Fly Wingless Ship” Popular Mechanics , avril 1936
- Vidéo silencieuse (intertitrée en russe) sur l’hélicoptère pionnier Cheremukhin / Yuriev TsAGI 1-EA
- Société américaine des hélicoptères
- Graham Warwick (17 juin 2016). “Comment l’hélicoptère s’est développé” . Semaine de l’aviation et technologie spatiale . Passer de l’idée à la réalité a pris beaucoup plus de temps pour l’hélicoptère que pour l’avion à voilure fixe.