Collecteur
En mathématiques , une variété est un espace topologique qui ressemble localement à l’espace euclidien près de chaque point. Plus précisément, une variété à n dimensions, ou n -variété en abrégé, est un espace topologique avec la propriété que chaque point a un voisinage Homéomorphe à un sous-ensemble ouvert de l’espace euclidien à n dimensions.
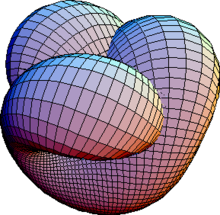 Le plan projectif réel est une variété bidimensionnelle qui ne peut pas être réalisée en trois dimensions sans auto-intersection, représentée ici comme surface de Boy .
Le plan projectif réel est une variété bidimensionnelle qui ne peut pas être réalisée en trois dimensions sans auto-intersection, représentée ici comme surface de Boy .  La surface de la Terre nécessite (au moins) deux cartes pour inclure chaque point. Ici, le globe est décomposé en cartes autour des pôles Nord et Sud .
La surface de la Terre nécessite (au moins) deux cartes pour inclure chaque point. Ici, le globe est décomposé en cartes autour des pôles Nord et Sud .
Les variétés unidimensionnelles incluent les lignes et les cercles , mais pas les huit . Les variétés bidimensionnelles sont aussi appelées surfaces . Les exemples incluent le plan , la sphère et le tore , ainsi que la bouteille de Klein et le plan projectif réel .
Le concept de variété est au cœur de nombreuses parties de la géométrie et de la physique mathématique moderne car il permet de décrire des structures complexes en termes de propriétés topologiques bien comprises d’espaces plus simples. Les collecteurs apparaissent naturellement comme des ensembles de solutions de Systèmes d’équations et comme des graphiques de fonctions. Le concept a des applications en infographie compte tenu de la nécessité d’associer des images à des coordonnées (par exemple des tomodensitogrammes ).
Les collecteurs peuvent être équipés d’une structure supplémentaire. Une classe importante de variétés sont les variétés différentiables ; leur structure différentiable permet de faire des calculs . Une Métrique riemannienne sur une variété permet de mesurer des distances et des angles . Les variétés symplectiques servent d’ espaces de phase dans le formalisme hamiltonien de la mécanique classique , tandis que les variétés lorentziennes à quatre dimensions modélisent l’ espace-temps en relativité générale .
L’étude des variétés nécessite une connaissance pratique du calcul différentiel et de la topologie .
Exemples motivants
Cercle
 Figure 1 : Les quatre cartes mappent chacune une partie du cercle sur un Intervalle ouvert et couvrent ensemble la totalité du cercle.
Figure 1 : Les quatre cartes mappent chacune une partie du cercle sur un Intervalle ouvert et couvrent ensemble la totalité du cercle.
Après une ligne, un cercle est l’exemple le plus simple d’une variété topologique. La topologie ignore la flexion, de sorte qu’un petit morceau de cercle est traité de la même manière qu’un petit morceau de ligne. Considérons, par exemple, la partie supérieure du cercle unitaire , x 2 + y 2 = 1, où la coordonnée y est positive (indiquée par l’arc jaune sur la figure 1 ). Tout point de cet arc peut être décrit de manière unique par sa coordonnée x . Ainsi, la projection sur la première coordonnée est une application continue et inversible de l’arc supérieur à l’ Intervalle ouvert (−1, 1) :
χ t o p ( x , y ) = x . {displaystyle chi _{mathrm {haut}}(x,y)=x.,} 
Ces fonctions ainsi que les régions ouvertes qu’elles cartographient sont appelées graphiques . De même, il existe des graphiques pour les parties inférieure (rouge), gauche (bleue) et droite (verte) du cercle :
χ b o t t o m ( x , y ) = x χ l e f t ( x , y ) = y χ r i g h t ( x , y ) = y . {displaystyle {begin{aligné}chi _{mathrm {bas}}(x,y)&=x\chi _{mathrm {gauche}}(x,y)&=y\ chi _{mathrm {right} }(x,y)&=y.end{aligned}}} 
Ensemble, ces parties couvrent tout le cercle et les quatre cartes forment un atlas pour le cercle.
Les graphiques du haut et de droite, χ t o p {displaystyle chi _{mathrm {haut} }} 





T ( a ) = χ r i g h t ( χ t o p − 1 [ a ] ) = χ r i g h t ( a , 1 − a 2 ) = 1 − a 2 {displaystyle {begin{aligned}T(a)&=chi _{mathrm {right} }left(chi _{mathrm {top} }^{-1}left[aright] right)\&=chi _{mathrm {right} }left(a,{sqrt {1-a^{2}}}right)\&={sqrt {1-a^ {2}}}end{aligné}}} ![{displaystyle {begin{aligned}T(a)&=chi _{mathrm {right} }left(chi _{mathrm {top} }^{-1}left[aright]right)\&=chi _{mathrm {right} }left(a,{sqrt {1-a^{2}}}right)\&={sqrt {1-a^{2}}}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/40ce5573c9fdbffd539c2d9a9f80fdd33ca68ae3)
Une telle fonction est appelée une carte de transition .
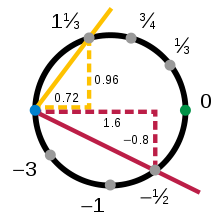 Figure 2 : Un diagramme multiple circulaire basé sur la pente, couvrant tous les points du cercle sauf un.
Figure 2 : Un diagramme multiple circulaire basé sur la pente, couvrant tous les points du cercle sauf un.
Les graphiques du haut, du bas, de gauche et de droite ne forment pas le seul atlas possible. Les graphiques n’ont pas besoin d’être des projections géométriques, et le nombre de graphiques est une question de choix. Considérez les graphiques
χ m i n u s ( x , y ) = s = y 1 + x {displaystyle chi _{mathrm {moins}}(x,y)=s={frac {y}{1+x}}} 

Ici s est la pente de la droite passant par le point aux coordonnées ( x , y ) et le point pivot fixe (−1, 0) ; de même, t est l’opposé de la pente de la ligne passant par les points aux coordonnées ( x , y ) et (+1, 0). L’application inverse de s à ( x , y ) est donnée par
x = 1 − s 2 1 + s 2 y = 2 s 1 + s 2 {displaystyle {begin{aligned}x&={frac {1-s^{2}}{1+s^{2}}}\[5pt]y&={frac {2s}{1+s ^{2}}}end{aligné}}} ![{displaystyle {begin{aligned}x&={frac {1-s^{2}}{1+s^{2}}}\[5pt]y&={frac {2s}{1+s^{2}}}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f08d1a41825c29ff1f55d16dae15784d549e8179)
On peut confirmer que x 2 + y 2 = 1 pour toutes les valeurs de s et t . Ces deux cartes fournissent un deuxième atlas pour le cercle, avec la carte de transition
t = 1 s {displaystyle t={frac {1}{s}}} 
Chaque graphique omet un seul point, soit (−1, 0) pour s ou (+1, 0) pour t , donc aucun graphique seul n’est suffisant pour couvrir tout le cercle. On peut prouver qu’il n’est pas possible de couvrir le cercle complet avec un seul graphique. Par exemple, bien qu’il soit possible de construire un cercle à partir d’un seul intervalle de ligne en superposant et en “collant” les extrémités, cela ne produit pas de graphique ; une partie du cercle sera mappée aux deux extrémités à la fois, perdant l’inversibilité.
Sphère
La sphère est un exemple de surface. La sphère unitaire de l’Équation implicite
x 2 + y 2 + z 2 – 1 = 0
peut être couvert par un atlas de six cartes : le plan z = 0 divise la sphère en deux demi-sphères ( z > 0 et z < 0 ), qui peuvent toutes deux être cartographiées sur le disque x 2 + y 2 < 1 par la projection sur le plan xy de coordonnées. Cela fournit deux graphiques; les quatre autres cartes sont fournies par une construction similaire avec les deux autres plans de coordonnées.
Comme pour le cercle, on peut définir une carte qui couvre toute la sphère à l’exception d’un point. Ainsi deux cartes suffisent, mais la sphère ne peut être couverte par une seule carte.
Cet exemple est historiquement significatif, car il a motivé la terminologie; il est apparu que toute la surface de la Terre ne peut pas avoir une représentation plane constituée d’une seule carte (appelée aussi “carte”, voir carte marine ), et donc il faut des atlas pour couvrir toute la surface de la Terre.
Autres courbes
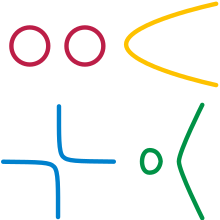 Quatre variétés de courbes algébriques : ■ cercles, ■ parabole, ■ hyperbole, ■ cubique.
Quatre variétés de courbes algébriques : ■ cercles, ■ parabole, ■ hyperbole, ■ cubique.
Les collecteurs n’ont pas besoin d’être connectés (tout en “une seule pièce”); un exemple est une paire de cercles séparés.
Les collecteurs n’ont pas besoin d’être fermés ; ainsi un segment de droite sans ses extrémités est une variété. Elles ne sont jamais dénombrables , sauf si la dimension de la variété est 0. En rassemblant ces libertés, d’autres exemples de variétés sont une parabole , une hyperbole et le lieu des points sur une Courbe cubique y 2 = x 3 − x (une boucle fermée pièce et une pièce ouverte et infinie).
Cependant, sont exclus des exemples comme deux cercles qui se touchent et partagent un point pour former un chiffre 8 ; au point partagé, un graphique satisfaisant ne peut pas être créé. Même avec la flexion autorisée par la topologie, le voisinage du point partagé ressemble à un “+”, pas à une ligne. Un “+” n’est pas Homéomorphe à un segment de droite, puisque la suppression du point central du “+” donne un espace à quatre composantes (c’est-à-dire des morceaux), alors que la suppression d’un point d’un segment de droite donne un espace avec au plus deux morceaux ; les opérations topologiques conservent toujours le nombre de pièces.
Définition mathématique
De manière informelle, une variété est un espace “modélisé” sur l’espace euclidien.
Il existe de nombreux types de collecteurs différents. En géométrie et topologie , toutes les variétés sont des variétés topologiques , éventuellement avec une structure supplémentaire. Une variété peut être construite en donnant une collection de cartes de coordonnées, c’est-à-dire un revêtement par des ensembles ouverts avec des homéomorphismes à un espace euclidien, et des fonctions de patch [ clarification nécessaire ] : homéomorphismes d’une région de l’espace euclidien à une autre région s’ils correspondent à la même partie du collecteur dans deux tableaux de coordonnées différents. Une variété peut recevoir une structure supplémentaire si les fonctions de correction satisfont des axiomes au-delà de la continuité. Par exemple, les variétés différentiables ont des homéomorphismes sur les voisinages qui se chevauchentdifféomorphes les uns avec les autres, de sorte que la variété a un ensemble bien défini de fonctions qui sont différentiables dans chaque voisinage, donc différentiables sur la variété dans son ensemble.
Formellement, une variété (topologique) est un second espace de Hausdorff dénombrable qui est localement Homéomorphe à l’espace euclidien.
Second dénombrable et Hausdorff sont des conditions ponctuelles ; le Deuxième dénombrable exclut les espaces qui sont en quelque sorte “trop grands” tels que la longue ligne , tandis que Hausdorff exclut les espaces tels que “la ligne à deux origines” (ces généralisations de variétés sont discutées dans les variétés non-Hausdorff ).
Localement Homéomorphe à l’espace euclidien signifie que chaque point a un voisinage Homéomorphe à une n -boule euclidienne ouverte ,
B n = { ( x 1 , x 2 , … , x n ) ∈ R n ∣ x 1 2 + x 2 2 + ⋯ + x n 2 < 1 } . {displaystyle mathbf {B} ^{n}=left{(x_{1},x_{2},dots ,x_{n})in mathbb {R} ^{n}mid x_ {1}^{2}+x_{2}^{2}+cdots +x_{n}^{2}<1right}.} 

Généralement, les variétés sont considérées comme ayant une dimension fixe (l’espace doit être localement Homéomorphe à une n -boule fixe), et un tel espace est appelé une n -variété ; cependant, certains auteurs admettent des variétés où différents points peuvent avoir des dimensions différentes . [1] Si une variété a une dimension fixe, on l’appelle une variété pure . Par exemple, la (surface d’une) sphère a une dimension constante de 2 et est donc une variété pure alors que l’ union disjointe d’une sphère et d’une ligne dans l’espace tridimensionnel n’est pasune variété pure. Puisque la dimension est un invariant local (c’est-à-dire que la carte envoyant chaque point à la dimension de son voisinage sur lequel un graphe est défini, est localement constante ), chaque composante connexe a une dimension fixe.
Schématiquement , une variété est un Espace localement annelé , dont le faisceau de structure est localement isomorphe au faisceau de fonctions continues (ou différentiables, ou complexe-analytiques, etc.) sur l’espace euclidien. Cette définition est principalement utilisée lors de l’examen des variétés analytiques en géométrie algébrique .
Graphiques, atlas et cartes de transition
La Terre sphérique est parcourue à l’aide de cartes ou de cartes plates, rassemblées dans un atlas. De même, une variété différentiable peut être décrite à l’aide de cartes mathématiques , appelées cartes de coordonnées , rassemblées dans un atlas mathématique . Il n’est généralement pas possible de décrire une variété avec une seule carte, car la structure globale de la variété est différente de la structure simple des cartes. Par exemple, aucune carte plate unique ne peut représenter la Terre entière sans séparation des entités adjacentes à travers les limites de la carte ou duplication de la couverture. Lorsqu’une variété est construite à partir de plusieurs cartes qui se chevauchent, les régions où elles se chevauchent contiennent des informations essentielles à la compréhension de la structure globale.
Graphiques
Une carte de coordonnées , un tableau de coordonnées , ou simplement un tableau , d’une variété est une carte inversible entre un sous-ensemble de la variété et un espace simple tel que la carte et son inverse conservent la structure souhaitée. [2] Pour une variété topologique, l’espace simple est un sous-ensemble d’un espace euclidien R n {displaystyle mathbb{R} ^{n}} 
Dans le cas d’une variété différentiable, un ensemble de cartes appelé atlas permet de faire des calculs sur les variétés. Les coordonnées polaires , par exemple, forment une carte pour l’avion R 2 {displaystyle mathbb {R} ^{2}} 
Atlas
La description de la plupart des variétés nécessite plus d’un tableau. Une collection spécifique de cartes qui couvre une variété s’appelle un atlas . Un atlas n’est pas unique car toutes les variétés peuvent être couvertes de multiples façons en utilisant différentes combinaisons de cartes. Deux atlas sont dits équivalents si leur union est aussi un atlas.
L’atlas contenant toutes les cartes possibles compatibles avec un atlas donné est appelé l’ atlas maximal (c’est-à-dire une classe d’équivalence contenant cet atlas donné). Contrairement à un atlas ordinaire, l’atlas maximal d’une variété donnée est unique. Bien qu’utile pour les définitions, c’est un objet abstrait et non utilisé directement (par exemple dans les calculs).
Cartes de transition
Les cartes d’un atlas peuvent se chevaucher et un seul point d’une variété peut être représenté dans plusieurs cartes. Si deux cartes se chevauchent, certaines parties d’entre elles représentent la même région de la variété, tout comme une carte de l’Europe et une carte de la Russie peuvent toutes deux contenir Moscou. Étant donné deux graphiques qui se chevauchent, une fonction de transition peut être définie qui va d’une boule ouverte à R n {displaystyle mathbb{R} ^{n}}
Structure supplémentaire
Un atlas peut également être utilisé pour définir une structure supplémentaire sur le collecteur. La structure est d’abord définie sur chaque graphique séparément. Si toutes les cartes de transition sont compatibles avec cette structure, la structure est transférée au collecteur.
C’est la manière standard de définir les variétés différentiables. Si les fonctions de transition d’un atlas pour une variété topologique préservent la structure différentielle naturelle de R n {displaystyle mathbb{R} ^{n}}
La structure du collecteur dépend de l’atlas, mais on peut parfois dire que différents atlas donnent lieu à la même structure. De tels atlas sont dits compatibles .
Ces notions sont précisées en général par l’utilisation de pseudogroupes .
Collecteur avec limite
Une variété à bord est une variété à arête. Par exemple, une feuille de papier est une variété à 2 dimensions avec une frontière unidimensionnelle. Le bord d’une n -variété à bord est une ( n −1) -variété. Un disque (cercle plus intérieur) est une variété à 2 bords. Sa frontière est un cercle, une 1-variété . Un carré avec intérieur est aussi une variété à 2 bords. Une boule (sphère plus intérieur) est une variété 3 à bord. Sa frontière est une sphère, une 2-variété. (Voir aussi Limite (topologie) ).
En langage technique, une variété avec frontière est un espace contenant à la fois des points intérieurs et des points frontières. Tout point intérieur a un voisinage Homéomorphe à la n -boule ouverte {( x 1 , x 2 , …, x n ) | Σ x je 2 < 1}. Chaque point frontière a un voisinage Homéomorphe à la “demi” n -boule {( x 1 , x 2 , …, x n ) | Σ x je 2 < 1 et x 1 ≥ 0}. L’homéomorphisme doit envoyer chaque point frontière à un point avec x 1 = 0.
Limite et intérieur
Soit M une variété à bord. L’ intérieur de M , noté Int M , est l’ensemble des points de M qui ont des voisinages homéomorphes à un ouvert de R n {displaystyle mathbb{R} ^{n}} 
Si M est une variété de bord de dimension n , alors Int M est une variété (sans bord) de dimension n et ∂ M est une variété (sans bord) de dimension n − 1 .
Construction
Un même collecteur peut être construit de différentes manières, chacune mettant l’accent sur un aspect différent du collecteur, conduisant ainsi à un point de vue légèrement différent.
Graphiques
 Le graphique mappe la partie de la sphère avec la coordonnée z positive sur un disque.
Le graphique mappe la partie de la sphère avec la coordonnée z positive sur un disque.
La façon la plus simple de construire une variété est peut-être celle utilisée dans l’exemple ci-dessus du cercle. Tout d’abord, un sous-ensemble de R 2 {displaystyle mathbb {R} ^{2}}
Sphère avec graphiques
Une sphère peut être traitée presque de la même manière que le cercle. En mathématiques, une sphère n’est que la surface (pas l’intérieur solide), qui peut être définie comme un sous-ensemble de R 3 {displaystyle mathbb {R} ^{3}} 
S = { ( x , y , z ) ∈ R 3 ∣ x 2 + y 2 + z 2 = 1 } . {displaystyle S=left{(x,y,z)in mathbb {R} ^{3}mid x^{2}+y^{2}+z^{2}=1right }.} 
La sphère est bidimensionnelle, de sorte que chaque graphique mappera une partie de la sphère sur un sous-ensemble ouvert de R 2 {displaystyle mathbb {R} ^{2}}
χ ( x , y , z ) = ( x , y ) , { displaystyle chi (x, y, z) = (x, y), } 
mappe l’hémisphère nord sur le disque unitaire ouvert en le projetant sur le plan ( x , y ). Un graphique similaire existe pour l’hémisphère sud. Avec deux cartes projetées sur le plan ( x , z ) et deux cartes projetées sur le plan ( y , z ), on obtient un atlas de six cartes qui couvre toute la sphère.
Ceci peut être facilement généralisé aux sphères de dimension supérieure.
Patchwork
Un collecteur peut être construit en collant ensemble des pièces de manière cohérente, ce qui en fait des graphiques qui se chevauchent. Cette construction est possible pour n’importe quelle variété et est donc souvent utilisée comme caractérisation, en particulier pour les variétés différentiables et riemanniennes. Il se concentre sur un atlas, car les patchs fournissent naturellement des cartes, et puisqu’il n’y a pas d’espace extérieur impliqué, cela conduit à une vue intrinsèque de la variété.
La variété est construite en spécifiant un atlas, lui-même défini par des cartes de transition. Un point de la variété est donc une classe d’équivalence de points qui sont mis en correspondance les uns avec les autres par des cartes de transition. Les graphiques mappent les classes d’équivalence aux points d’un seul patch. Il y a généralement de fortes exigences sur la cohérence des cartes de transition. Pour les variétés topologiques, elles doivent être des homéomorphismes ; si ce sont aussi des difféomorphismes, la variété résultante est une variété différentiable.
Cela peut être illustré avec la carte de transition t = 1 ⁄ s de la seconde moitié de l’exemple de cercle. Commencez avec deux copies de la ligne. Utilisez la coordonnée s pour la première copie et t pour la deuxième copie. Maintenant, collez les deux copies ensemble en identifiant le point t sur la deuxième copie avec le point s = 1 ⁄ t sur la première copie (les points t = 0 et s = 0 ne sont identifiés avec aucun point sur la première et la deuxième copie, respectivement). Cela donne un cercle.
Vue intrinsèque et extrinsèque
La première construction et cette construction sont très similaires, mais représentent des points de vue assez différents. Dans la première construction, la variété est considérée comme intégrée dans un espace euclidien. C’est la vue extrinsèque . Lorsqu’une variété est considérée de cette manière, il est facile d’utiliser l’intuition des espaces euclidiens pour définir une structure supplémentaire. Par exemple, dans un espace euclidien, il est toujours clair si un vecteur en un point est tangent ou normal à une surface passant par ce point.
La construction en patchwork n’utilise aucune imbrication, mais considère simplement la variété comme un espace topologique en soi. Ce point de vue abstrait est appelé le point de vue intrinsèque . Il peut être plus difficile d’imaginer ce que pourrait être un vecteur tangent, et il n’y a pas de notion intrinsèque de faisceau normal , mais à la place, il existe un faisceau normal stable intrinsèque .
n -Sphère en patchwork
La n -sphère S n est une généralisation de l’idée d’un cercle (1-sphère) et d’une sphère (2-sphère) à des dimensions supérieures. Une n -sphère S n peut être construite en collant ensemble deux copies de R n {displaystyle mathbb{R} ^{n}}
R n ∖ { 0 } → R n ∖ { 0 } : x ↦ x / ‖ x ‖ 2 . {displaystyle mathbb {R} ^{n}setminus {0}to mathbb {R} ^{n}setminus {0}:xmapsto x/|x|^{ 2}.} 
Cette fonction est son propre inverse et peut donc être utilisée dans les deux sens. Comme la carte de transition est une fonction lisse , cet atlas définit une variété lisse. Dans le cas n = 1, l’exemple se simplifie en l’exemple de cercle donné précédemment.
Identifier les points d’un collecteur
Il est possible de définir différents points d’une variété comme étant identiques. Cela peut être visualisé comme le collage de ces points ensemble en un seul point, formant un espace quotient . Il n’y a cependant aucune raison de s’attendre à ce que de tels espaces quotients soient des variétés. Parmi les espaces quotients possibles qui ne sont pas nécessairement des variétés, les orbifolds et les complexes CW sont considérés comme relativement bien comportés . Un exemple d’espace quotient d’une variété qui est aussi une variété est l’ espace projectif réel , identifié comme espace quotient de la sphère correspondante.
Une méthode pour identifier les points (les coller ensemble) consiste à actionner à droite (ou à gauche) un groupe , qui agit sur le collecteur. Deux points sont identifiés si l’un est déplacé sur l’autre par un élément de groupe. Si M est la variété et G est le groupe, l’espace quotient résultant est noté M / G (ou G M ).
Les variétés qui peuvent être construites en identifiant des points incluent les tores et les espaces projectifs réels (en commençant par un plan et une sphère, respectivement).
Coller le long des limites
Deux collecteurs avec des frontières peuvent être collés ensemble le long d’une frontière. Si cela est fait de la bonne manière, le résultat est également un collecteur. De même, deux limites d’un même collecteur peuvent être collées ensemble.
Formellement, le recollement est défini par une bijection entre les deux frontières [ incertain – discuter ] . Deux points sont identifiés lorsqu’ils sont mappés l’un sur l’autre. Pour une variété topologique, cette bijection doit être un homéomorphisme, sinon le résultat ne sera pas une variété topologique. De même, pour une variété différentiable, il doit s’agir d’un difféomorphisme. Pour les autres collecteurs, les autres structures doivent être conservées.
Un cylindre fini peut être construit comme une variété en commençant par une bande [0,1] × [0,1] et en collant une paire d’arêtes opposées sur la frontière par un difféomorphisme approprié. Un plan projectif peut être obtenu en collant une sphère avec un trou à une bande de Möbius le long de leurs limites circulaires respectives.
Produits cartésiens
Le produit cartésien des variétés est aussi une variété.
La dimension de la variété produit est la somme des dimensions de ses facteurs. Sa topologie est la topologie produit et un produit cartésien de cartes est une carte pour la variété produit. Ainsi, un atlas pour la variété de produits peut être construit en utilisant des atlas pour ses facteurs. Si ces atlas définissent une structure différentielle sur les facteurs, l’atlas correspondant définit une structure différentielle sur le collecteur produit. Il en est de même pour toute autre structure définie sur les facteurs. Si l’un des facteurs a une frontière, la variété produit a également une frontière. Les produits cartésiens peuvent être utilisés pour construire des tores et des cylindres finis , par exemple, comme S 1 × S 1 et S 1 × [0,1], respectivement.
 Un cylindre fini est une variété à bord.
Un cylindre fini est une variété à bord.
Histoire
L’étude des variétés combine de nombreux domaines importants des mathématiques : elle généralise des concepts tels que les courbes et les surfaces ainsi que des idées de l’algèbre linéaire et de la topologie.
Développement précoce
Avant le concept moderne de collecteur, il y avait plusieurs résultats importants.
La géométrie non euclidienne considère les espaces où le postulat parallèle d’ Euclide échoue. Saccheri étudia pour la première fois de telles géométries en 1733, mais chercha seulement à les réfuter. Gauss , Bolyai et Lobachevsky les ont découverts indépendamment 100 ans plus tard. Leurs recherches ont mis au jour deux types d’espaces dont les structures géométriques diffèrent de celles de l’espace euclidien classique ; celles-ci ont donné naissance à la géométrie hyperbolique et à la géométrie elliptique . Dans la théorie moderne des variétés, ces notions correspondent aux variétés riemanniennes à courbure négative et positive constante , respectivement.
Carl Friedrich Gauss a peut-être été le premier à considérer les espaces abstraits comme des objets mathématiques à part entière. Son théorème egregium donne une méthode pour calculer la courbure d’une surface sans tenir compte de l’ espace ambiant dans lequel se trouve la surface. Une telle surface serait, dans la terminologie moderne, appelée une variété ; et en termes modernes, le théorème a prouvé que la courbure de la surface est une propriété intrinsèque . La théorie des variétés en est venue à se concentrer exclusivement sur ces propriétés intrinsèques (ou invariants), tout en ignorant largement les propriétés extrinsèques de l’espace ambiant.
Un autre exemple, plus topologique, d’une propriété intrinsèque d’une variété est sa caractéristique d’Euler . Leonhard Euler a montré que pour un polytope convexe dans l’espace euclidien tridimensionnel avec V sommets (ou coins), E arêtes et F faces,
V − E + F = 2. {displaystyle VE+F=2. } 
Synthèse
Les recherches de Niels Henrik Abel et Carl Gustav Jacobi sur l’inversion des intégrales elliptiques dans la première moitié du XIXe siècle les ont amenés à considérer des types particuliers de variétés complexes, maintenant connues sous le nom de Jacobiennes . Bernhard Riemann a ensuite contribué à leur théorie, clarifiant la signification géométrique du processus de continuation analytique des fonctions de variables complexes.
Une autre source importante de variétés dans les mathématiques du XIXe siècle était la mécanique analytique , telle que développée par Siméon Poisson , Jacobi et William Rowan Hamilton . Les états possibles d’un système mécanique sont considérés comme des points d’un espace abstrait, l’espace des phases dans les formalismes lagrangien et hamiltonien de la mécanique classique. Cet espace est en fait une variété de grande dimension, dont la dimension correspond aux degrés de liberté du système et où les points sont spécifiés par leurs coordonnées généralisées . Pour un mouvement sans contrainte de particules libres, la variété est équivalente à l’espace euclidien, mais diverses lois de conservationle contraindre à des formations plus compliquées, par exemple les tores de Liouville . La théorie d’un corps solide en rotation, développée au 18e siècle par Leonhard Euler et Joseph-Louis Lagrange , donne un autre exemple où la variété est non triviale. Les aspects géométriques et topologiques de la mécanique classique ont été soulignés par Henri Poincaré , l’un des fondateurs de la topologie.
Riemann a été le premier à faire un travail approfondi généralisant l’idée d’une surface à des dimensions supérieures. Le nom collecteur vient du terme allemand original de Riemann , Mannigfaltigkeit , que William Kingdon Clifford a traduit par “manifoldness”. Dans sa leçon inaugurale de Göttingen, Riemann a décrit l’ensemble de toutes les valeurs possibles d’une variable avec certaines contraintes comme un Mannigfaltigkeit , car la variable peut avoir plusieurs valeurs. Il fait la distinction entre stetige Mannigfaltigkeit et diskrete Mannigfaltigkeit ( diversité continue et diversité discontinue), selon que la valeur change continuellement ou non. Comme exemples continus, Riemann se réfère non seulement aux couleurs et aux emplacements des objets dans l’espace, mais aussi aux formes possibles d’une figure spatiale. En utilisant l’induction , Riemann construit une n-fach ausgedehnte Mannigfaltigkeit ( n fois la variété étendue ou la variété n-dimensionnelle ) comme un empilement continu de (n−1) variétés dimensionnelles. La notion intuitive de Riemann d’une Mannigfaltigkeit a évolué vers ce qui est aujourd’hui formalisé comme une variété. Les variétés riemanniennes et les surfaces de Riemann portent le nom de Riemann.
La définition de Poincaré
Dans son article très influent, Analysis Situs , [4] Henri Poincaré a donné une définition d’une variété différentiable ( variété ) qui a servi de précurseur au concept moderne de variété. [5]
Dans la première section d’ Analysis Situs , Poincaré définit une variété comme l’ensemble de niveaux d’une fonction continuellement différentiable entre des espaces euclidiens qui satisfait l’hypothèse de non-dégénérescence du théorème de fonction implicite . Dans la troisième section, il commence par remarquer que le graphe d’une fonction continûment différentiable est une variété dans ce dernier sens. Il propose ensuite une nouvelle définition, plus générale, de la variété basée sur une « chaîne de variétés » .
La notion de Poincaré d’une chaîne de variétés est un précurseur de la notion moderne d’atlas. En particulier, il considère deux variétés définies respectivement comme des graphes de fonctions θ ( y ) {displaystyle thêta (y)} 


Par exemple, le cercle unitaire dans le plan peut être considéré comme le graphique de la fonction y = 1 − x 2 {textstyle y={sqrt {1-x^{2}}}} 




Hermann Weyl a donné une définition intrinsèque des variétés différentiables dans son cours magistral sur les surfaces de Riemann en 1911-1912, ouvrant la voie au concept général d’ espace topologique qui a suivi peu de temps après. Au cours des années 1930 , Hassler Whitney et d’autres ont clarifié les aspects fondamentaux du sujet, et ainsi les intuitions remontant à la seconde moitié du 19e siècle sont devenues précises et se sont développées grâce à la géométrie différentielle et à la théorie des groupes de Lie . Notamment, le théorème de plongement de Whitney [6] a montré que la définition intrinsèque en termes de cartes était équivalente à la définition de Poincaré en termes de sous-ensembles de l’espace euclidien.
Topologie des variétés : faits saillants
Les variétés bidimensionnelles, également appelées surfaces 2D imbriquées dans notre espace 3D commun, ont été considérées par Riemann sous l’apparence de surfaces de Riemann , et rigoureusement classées au début du XXe siècle par Poul Heegaard et Max Dehn . Poincaré a été le pionnier de l’étude des variétés tridimensionnelles et a soulevé une question fondamentale à leur sujet, aujourd’hui connue sous le nom de conjecture de Poincaré . Après près d’un siècle, Grigori Perelman a prouvé la conjecture de Poincaré (voir la Solution de la conjecture de Poincaré ). Programme de géométrisation de William Thurston, formulée dans les années 1970, a fourni une extension considérable de la conjecture de Poincaré aux variétés tridimensionnelles générales. Les variétés à quatre dimensions ont été portées au premier plan de la recherche mathématique dans les années 1980 par Michael Freedman et, dans un cadre différent, par Simon Donaldson , motivé par les progrès alors récents de la physique théorique ( théorie de Yang-Mills ), où elles servent de un substitut à l’ espace -temps “plat” ordinaire . Andrey Markov Jr. a montré en 1960 qu’aucun algorithme n’existe pour classer les variétés à quatre dimensions. Des travaux importants sur les variétés de dimension supérieure, y compris des analogues de la conjecture de Poincaré , avaient été réalisés plus tôt parRené Thom , John Milnor , Stephen Smale et Sergei Novikov . La théorie de Morse est une technique très répandue et flexible qui sous-tend de nombreux travaux sur la topologie des variétés .
Structure supplémentaire
Variétés topologiques
Le type de variété le plus simple à définir est la variété topologique, qui ressemble localement à un espace euclidien “ordinaire”. R n {displaystyle mathbb{R} ^{n}}
Une variété topologique ressemble localement à un espace euclidien d’une manière assez faible : alors que pour chaque carte individuelle, il est possible de distinguer des fonctions différentiables ou de mesurer des distances et des angles, du simple fait qu’il s’agit d’une variété topologique, un espace n’a pas d’espace particulier et cohérent . choix de tels concepts. [7] Afin de discuter de telles propriétés pour une variété, il faut spécifier une structure supplémentaire et considérer les variétés différentiables et les variétés riemanniennesdiscuté ci-dessous. En particulier, la même variété topologique sous-jacente peut avoir plusieurs classes mutuellement incompatibles de fonctions différentiables et un nombre infini de façons de spécifier les distances et les angles.
Habituellement, des hypothèses techniques supplémentaires sur l’espace topologique sont faites pour exclure les cas pathologiques. Il est d’usage d’exiger que l’espace soit Hausdorff et second dénombrable .
La dimension de la variété à un certain point est la dimension de l’espace euclidien auquel correspondent les cartes à ce point (numéro n dans la définition). Tous les points d’une variété connectée ont la même dimension. Certains auteurs exigent que toutes les cartes d’une variété topologique correspondent à des espaces euclidiens de même dimension. Dans ce cas, chaque variété topologique a un invariant topologique, sa dimension.
Variétés différentiables
Pour la plupart des applications, un type spécial de variété topologique, à savoir une variété différentiable , est utilisé. Si les cartes locales sur une variété sont compatibles dans un certain sens, on peut définir des directions, des espaces tangents et des fonctions différentiables sur cette variété. En particulier, il est possible d’utiliser le calcul sur une variété différentiable. Chaque point d’une variété différentiable à n dimensions possède un espace tangent . Il s’agit d’un espace euclidien à n dimensions constitué des vecteurs tangents des courbes passant par le point.
Deux classes importantes de variétés différentiables sont les variétés lisses et analytiques . Pour les variétés lisses, les applications de transition sont lisses, c’est-à-dire infiniment différentiables. Les variétés analytiques sont des variétés lisses avec la condition supplémentaire que les cartes de transition sont analytiques (elles peuvent être exprimées sous forme de série de puissance ). La sphère peut recevoir une structure analytique, tout comme les courbes et les surfaces les plus familières.
Un ensemble rectifiable généralise l’idée d’une courbe lisse par morceaux ou rectifiable à des dimensions supérieures; cependant, les ensembles rectifiables ne sont pas en général des variétés.
Variétés riemanniennes
Pour mesurer des distances et des angles sur des variétés, la variété doit être riemannienne. Une variété riemannienne est une variété différentiable dans laquelle chaque espace tangent est équipé d’un produit interne ⟨⋅ , ⋅⟩ d’une manière qui varie régulièrement d’un point à l’autre. Étant donné deux vecteurs tangents u et v , le produit scalaire ⟨ u , v ⟩ donne un nombre réel. Le produit scalaire (ou scalaire) est un exemple typique de produit scalaire. Cela permet de définir diverses notions telles que la longueur, les angles , les aires (ou volumes ), la courbureet divergence des champs de vecteurs .
Toutes les variétés différentiables (de dimension constante) peuvent recevoir la structure d’une variété riemannienne. L’espace euclidien lui-même porte une structure naturelle de variété riemannienne (les espaces tangents sont naturellement identifiés avec l’espace euclidien lui-même et portent le produit scalaire standard de l’espace). De nombreuses courbes et surfaces familières, y compris par exemple toutes les n -sphères, sont spécifiées comme des sous-espaces d’un espace euclidien et héritent d’une métrique de leur intégration dans celui-ci.
Collecteurs Finsler
Une variété Finsler permet la définition de la distance mais ne nécessite pas le concept d’angle ; c’est une variété analytique dans laquelle chaque espace tangent est muni d’une norme , ||·||, d’une manière qui varie régulièrement d’un point à l’autre. Cette norme peut être étendue à une métrique , définissant la longueur d’une courbe ; mais il ne peut en général pas être utilisé pour définir un produit scalaire.
Toute variété riemannienne est une variété de Finsler.
Groupes de mensonge
Les groupes de Lie , nommés d’après Sophus Lie , sont des variétés différentiables qui portent également la structure d’un groupe telle que les opérations de groupe sont définies par des applications lisses.
Un espace vectoriel euclidien avec l’opération de groupe d’addition vectorielle est un exemple de groupe de Lie non compact. Un exemple simple d’un groupe de Lie compact est le cercle : l’opération de groupe est simplement une rotation. Ce groupe, connu sous le nom de U(1), peut également être caractérisé comme le groupe de nombres complexes de module 1 avec la multiplication comme opération de groupe.
D’autres exemples de groupes de Lie incluent des groupes spéciaux de matrices , qui sont tous des sous-groupes du groupe linéaire général , le groupe de matrices n par n avec un déterminant non nul. Si les entrées de la matrice sont des nombres réels , ce sera une variété déconnectée à n 2 dimensions. Les groupes orthogonaux , les groupes de symétrie de la sphère et des hypersphères , sont des variétés à n ( n −1)/2 dimensions, où n −1 est la dimension de la sphère. D’autres exemples peuvent être trouvés dans le tableau des groupes de Lie .
Autres types de collecteurs
- Une variété complexe est une variété dont les cartes prennent des valeurs dans C n {displaystyle mathbb {C} ^{n}}
et dont les fonctions de transition sont holomorphes sur les recouvrements. Ces variétés sont les objets d’étude de base en géométrie complexe . Une variété à une dimension complexe est appelée une surface de Riemann . Une variété complexe à n dimensions a la dimension 2 n comme variété différenciable réelle.
- Une variété CR est une variété modélisée sur les frontières des domaines dans C n {displaystyle mathbb {C} ^{n}}
.
- « Variétés de dimension infinie » : pour tenir compte des dimensions infinies, on peut considérer des variétés de Banach qui sont localement homéomorphes aux espaces de Banach . De même, les variétés de Fréchet sont localement homéomorphes aux espaces de Fréchet .
- Une variété symplectique est une sorte de variété utilisée pour représenter les espaces de phase en mécanique classique . Ils sont munis d’une 2-forme qui définit le crochet de Poisson . Un type de collecteur étroitement lié est un collecteur de contact .
- Une variété combinatoire est une sorte de variété qui est la discrétisation d’une variété. Cela signifie généralement une variété linéaire par morceaux constituée de complexes simpliciaux .
- Une variété numérique est un type particulier de variété combinatoire définie dans l’espace numérique. Voir la topologie numérique

Classification et invariants
Différentes notions de variétés ont différentes notions de classification et d’invariant ; dans cette section, nous nous concentrons sur les variétés fermées lisses.
La classification des variétés fermées lisses est bien comprise dans son principe , sauf en dimension 4 : en petites dimensions (2 et 3) elle est géométrique, via le théorème d’uniformisation et la solution de la conjecture de Poincaré , et en grande dimension (5 et plus) elle est algébrique, via la théorie de la chirurgie . Il s’agit d’une classification de principe : la question générale de savoir si deux variétés lisses sont difféomorphes n’est pas calculable en général. De plus, les calculs spécifiques restent difficiles, et il y a beaucoup de questions ouvertes.
Les surfaces orientables peuvent être visualisées, et leurs classes de difféomorphisme énumérées, par genre. Étant donné deux surfaces orientables, on peut déterminer si elles sont difféomorphes en calculant leurs genres respectifs et en comparant : elles sont difféomorphes si et seulement si les genres sont égaux, donc le genre forme un ensemble complet d’invariants .
C’est beaucoup plus difficile dans les dimensions supérieures: les variétés de dimension supérieure ne peuvent pas être directement visualisées (bien que l’intuition visuelle soit utile pour les comprendre), leurs classes de difféomorphisme ne peuvent pas non plus être énumérées, ni en général déterminer si deux descriptions différentes d’une variété de dimension supérieure plusieurs se réfèrent au même objet.
Cependant, on peut déterminer si deux variétés sont différentes s’il existe une caractéristique intrinsèque qui les différencie. Ces critères sont communément appelés invariants , car, bien qu’ils puissent être définis en termes de présentation (comme le genre en termes de triangulation), ils sont les mêmes par rapport à toutes les descriptions possibles d’une variété particulière : ils sont invariants sous différentes descriptions.
Naïvement, on pourrait espérer développer un arsenal de critères invariants qui classifieraient définitivement toutes les variétés jusqu’à l’isomorphisme. Malheureusement, on sait que pour les variétés de dimension 4 et plus, il n’existe aucun programme capable de décider si deux variétés sont difféomorphes.
Les variétés lisses ont un riche ensemble d’invariants , provenant de la topologie par points , de la topologie algébrique classique et de la topologie géométrique . Les invariants les plus connus, visibles pour les surfaces, sont l’ orientabilité (un invariant normal, également détecté par homologie ) et le genre (un invariant homologique).
Les variétés fermées lisses n’ont pas d’invariants locaux (autres que la dimension), bien que les variétés géométriques aient des invariants locaux, notamment la courbure d’une variété riemannienne et la torsion d’une variété équipée d’une connexion affine . Cette distinction entre les invariants locaux et aucun invariant local est une façon courante de faire la distinction entre la géométrie et la topologie . Tous les invariants d’une variété fermée lisse sont donc globaux.
La topologie algébrique est une source d’un certain nombre de propriétés invariantes globales importantes. Certains critères clés incluent la propriété simplement connectée et l’orientabilité (voir ci-dessous). En effet, plusieurs branches des mathématiques, telles que la théorie de l’ homologie et de l’homotopie , et la théorie des classes caractéristiques ont été fondées afin d’étudier les propriétés invariantes des variétés.
Surfaces
Orientabilité
En dimension deux et plus, un critère d’invariant simple mais important est la question de savoir si une variété admet une orientation significative. Considérez une variété topologique avec des cartes mappées à R n {displaystyle mathbb{R} ^{n}}
Quelques exemples illustratifs de variétés non orientables incluent : (1) la bande de Möbius , qui est une variété à frontière, (2) la bouteille de Klein , qui doit se croiser dans sa représentation à 3 espaces, et (3) le plan projectif réel , qui se pose naturellement en géométrie.
Ruban de Möbius  Ruban de Möbius
Ruban de Möbius
Commencez par un cylindre circulaire infini debout verticalement, une variété sans frontière. Coupez-le haut et bas pour produire deux limites circulaires et la bande cylindrique entre elles. Il s’agit d’un collecteur orientable avec limite, sur lequel la “chirurgie” sera effectuée. Coupez la bande en tranches pour qu’elle puisse se dérouler pour devenir un rectangle, mais gardez une prise sur les extrémités coupées. Tournez une extrémité à 180°, en orientant la surface intérieure vers l’extérieur, et collez les extrémités ensemble de manière transparente. Il en résulte un ruban à demi-torsion permanente : le ruban de Möbius. Sa frontière n’est plus une paire de cercles, mais (topologiquement) un seul cercle; et ce qui était autrefois son “intérieur” a fusionné avec son “extérieur”, de sorte qu’il n’a plus qu’un seulcôté. De la même manière que la bouteille de Klein ci-dessous, cette surface bidimensionnelle devrait se croiser en deux dimensions, mais peut facilement être construite en trois dimensions ou plus.
Bouteille Klein  La bouteille Klein immergée dans l’espace tridimensionnel
La bouteille Klein immergée dans l’espace tridimensionnel
Prenez deux bandes de Moebius ; chacun a une seule boucle comme limite. Redressez ces boucles en cercles et laissez les bandes se déformer en bonnets croisés . Le collage des cercles produira un nouveau collecteur fermé sans frontière, la bouteille de Klein. La fermeture de la surface ne fait rien pour améliorer le manque d’orientabilité, elle supprime simplement la frontière. Ainsi, la bouteille de Klein est une surface fermée sans distinction entre l’intérieur et l’extérieur. Dans l’espace tridimensionnel, la surface d’une bouteille de Klein doit passer par elle-même. Construire une bouteille de Klein qui ne s’auto-sécante nécessite quatre dimensions d’espace ou plus.
Plan projectif réel
Commencez par une sphère centrée sur l’origine. Chaque ligne passant par l’origine perce la sphère en deux points opposés appelés antipodes . Bien qu’il n’y ait aucun moyen de le faire physiquement, il est possible (en considérant un espace quotient ) de fusionner mathématiquement chaque paire d’antipodes en un seul point. La surface fermée ainsi produite est le véritable plan projectif, encore une autre surface non orientable. Il a un certain nombre de descriptions et de constructions équivalentes, mais cette route explique son nom : tous les points sur une ligne donnée passant par l’origine se projettent vers le même “point” sur ce “plan”.
Genre et caractéristique d’Euler
Pour les variétés bidimensionnelles, une propriété invariante clé est le genre , ou “nombre de poignées” présentes dans une surface. Un tore est une sphère à une anse, un double tore est une sphère à deux anses, etc. En effet, il est possible de caractériser complètement des variétés compactes à deux dimensions sur la base du genre et de l’orientabilité. Dans les variétés de dimension supérieure, le genre est remplacé par la notion de caractéristique d’Euler , et plus généralement de nombres de Betti et d’homologie et de cohomologie .
Cartes des variétés
 Une surface Morin , une immersion utilisée en éversion de sphère
Une surface Morin , une immersion utilisée en éversion de sphère
Tout comme il existe différents types de variétés, il existe différents types de cartes de variétés . En plus des fonctions continues et des fonctions lisses en général, il existe des cartes avec des propriétés spéciales. En topologie géométrique , un type de base sont les plongements , dont la théorie des nœuds est un exemple central, et les généralisations telles que les immersions , les submersions , les espaces de recouvrement et les espaces de recouvrement ramifiés . Les résultats de base incluent le théorème d’intégration de Whitney et le théorème d’immersion de Whitney .
En géométrie riemannienne, on peut demander des cartes pour conserver la Métrique riemannienne, conduisant aux notions de plongements isométriques , d’immersions isométriques et de submersions riemanniennes ; un résultat de base est le théorème d’intégration de Nash .
Fonctions scalaires
 Tracé couleur 3D des harmoniques sphériques de degré n = 5 {displaystyle n=5}
Tracé couleur 3D des harmoniques sphériques de degré n = 5 {displaystyle n=5} 
Un exemple de base de cartes entre les variétés sont les fonctions scalaires sur une variété,
f : M → R {displaystyle fdeux points Mto mathbb {R} } 

parfois appelées fonctions régulières ou fonctionnelles , par analogie avec la géométrie algébrique ou l’algèbre linéaire. Celles-ci sont intéressantes à la fois en elles-mêmes et pour étudier la variété sous-jacente.
En topologie géométrique, les plus couramment étudiées sont les fonctions de Morse , qui donnent des décompositions en corps de poignée , tandis qu’en analyse mathématique , on étudie souvent la solution aux équations aux dérivées partielles , dont un exemple important est l’analyse harmonique , où l’on étudie les fonctions harmoniques : le noyau de Laplace opérateur . Cela conduit à des fonctions telles que les harmoniques sphériques et à des méthodes de noyau thermique pour étudier les variétés, telles que l’écoute de la forme d’un tambour et certaines preuves du théorème de l’ indice Atiyah-Singer .
Généralisations des variétés
Variétés dimensionnelles infinies La définition d’une variété peut être généralisée en supprimant l’exigence de dimensionnalité finie. Ainsi une variété de dimension infinie est un espace topologique localement Homéomorphe à un espace vectoriel topologique sur les réels. Cela omet les axiomes d’ensemble de points, permettant des cardinalités plus élevées et des variétés non-Hausdorff ; et il omet la dimension finie, permettant aux structures telles que les variétés de Hilbert d’être modélisées sur les espaces de Hilbert , les variétés de Banach d’être modélisées sur les espaces de Banach et les variétés de Fréchet d’être modélisées sur les espaces de Fréchet. Habituellement, on relâche l’une ou l’autre condition : les variétés avec les axiomes d’ensemble de points sont étudiées en topologie générale , tandis que les variétés de dimension infinie sont étudiées en analyse fonctionnelle . Orbifolds Un orbifold est une généralisation de variété permettant certains types de ” singularités ” dans la topologie. En gros, c’est un espace qui ressemble localement aux quotients d’un espace simple ( par exemple l’espace euclidien) par les actions de divers groupes finis . Les singularités correspondent à des points fixes des actions de groupe, et les actions doivent être compatibles dans un certain sens. Variétés et schémas algébriques Les variétés algébriques non singulières sur les nombres réels ou complexes sont des variétés. On généralise cela d’abord en autorisant les singularités, deuxièmement en autorisant différents champs, et troisièmement en émulant la construction de patching des variétés : tout comme une variété est collée à partir de sous-ensembles ouverts de l’espace euclidien, une variété algébrique est collée à partir de variétés algébriques affines, qui sont des ensembles nuls de polynômes sur des corps algébriquement clos. Les schémas sont également collés à partir de schémas affines, qui sont une généralisation des variétés algébriques. Les deux sont liés aux variétés, mais sont construits algébriquement en utilisant des faisceaux au lieu d’atlas. En raison des points singuliers , une variété n’est en général pas une variété, bien que linguistiquement la variété française , la Mannigfaltigkeit allemande et la variété anglaise soient largement synonymes . En français, une variété algébrique est appelée une variété algébrique (une variété algébrique ), tandis qu’une variété lisse est appelée une variété différentielle (une variété différentielle ). Espace stratifié Un «espace stratifié» est un espace qui peut être divisé en morceaux («strates»), chaque strate étant une variété, les strates s’emboîtant de manière prescrite (formellement, une filtration par sous-ensembles fermés). Il existe diverses définitions techniques, notamment un espace stratifié de Whitney (voir conditions de Whitney ) pour les variétés lisses et un espace topologiquement stratifié pour les variétés topologiques. Les exemples de base incluent le collecteur avec limite(variété de dimension supérieure et frontière de codimension 1) et variétés avec coins (variété de dimension supérieure, frontière de codimension 1, coins de codimension 2). Les espaces stratifiés de Whitney sont une large classe d’espaces, y compris les variétés algébriques, les variétés analytiques, les ensembles semi -algébriques et les ensembles sous -analytiques . CW-complexes Un complexe CW est un espace topologique formé en collant ensemble des disques de dimensionnalité différente. En général, l’espace résultant est singulier, donc pas une variété. Cependant, ils sont d’un intérêt central en topologie algébrique, en particulier en théorie de l’homotopie . Collecteurs d’homologie Une variété d’homologie est un espace qui se comporte comme une variété du point de vue de la théorie de l’homologie. Ce ne sont pas toutes des variétés, mais (en grande dimension) peuvent être analysées par la théorie de la chirurgie de la même manière que les variétés, et le fait de ne pas être une variété est une obstruction locale, comme dans la théorie de la chirurgie. [8] Espaces différentiels Laisser M {displaystyle M} 







Voir également
- Géodésique – Chemin droit sur une surface courbe ou une variété riemannienne
- Statistiques directionnelles : statistiques sur les variétés
- Liste des collecteurs
- Chronologie des variétés – Chronologie des mathématiques
- Mathématiques de la relativité générale – Structures et techniques mathématiques utilisées dans la théorie de la relativité générale
Par dimensions
- 3-variété – Espace mathématique
- 4-variété – Espace mathématique
- 5-manifold – Collecteur de dimension cinq
- Variétés de mappages
Remarques
- ^ Voir par exemple Riaza, Ricardo (2008), Systèmes différentiels-algébriques: Aspects analytiques et applications de circuit , World Scientific, p. 110, ISBN 9789812791818; Gunning, RC (1990), Introduction aux fonctions holomorphes de plusieurs variables, Volume 2 , CRC Press, p. 73, ISBN 9780534133092.
- ^ Shigeyuki Morita; Teruko Nagase ; Katsumi Nomizu (2001). Géométrie des formes différentielles . Librairie de l’American Mathematical Society. p. 12 . ISBN 0-8218-1045-6.[ lien mort ]
- ↑ La notion de carte peut être formalisée comme une décomposition cellulaire .
- ^ Poincaré, H. (1895). “Analyse Situs”. Journal de l’École Polytechnique . Série 11 (en français). Gauthier Villars.
- ^ Arnold, VI (1998). “О преподавании математики” [Sur l’enseignement des mathématiques]. Tapis Uspekhi. Nauk (en russe). 53 (319): 229–234. doi : 10.4213/rm5 . ; traduction en mathématiques russes. Enquêtes 53 (1998), no. 1, 229-236
- ^ Whitney, H. (1936). “Manipulations différentiables”. Annales de Mathématiques . Deuxième Série. 37 (3): 645–680. doi : 10.2307/1968482 . JSTOR 1968482 .
- ^ Kervaire, M. (1961). “Un collecteur qui n’admet aucune structure différentiable”. Commenter. Math. Helv . 35 (1): 1–14. doi : 10.1007/BF02565940 . S2CID 120977898 .
- ^ Bryant, J.; Ferry, S.; Mio, W. ; Weinberger, S. (1996). “Topologie des variétés d’homologie”. Annales de Mathématiques . Deuxième série. 143 (3): 435–467. arXiv : math/9304210 . doi : 10.2307/2118532 . JSTOR 2118532 .
- ^ Sikorski, R. (1967). “Dérivée covariante abstraite” . Colloque Mathematicum . 18 : 251–272. doi : 10.4064/cm-18-1-251-272 .
Références
- Freedman, Michael H. et Quinn, Frank (1990) Topologie des 4-variétés . Presse universitaire de Princeton. ISBN 0-691-08577-3 .
- Guillemin, Victor et Pollack, Alan (1974) Topologie différentielle . Prentice Hall. ISBN 0-13-212605-2 . Texte avancé de premier cycle / première année inspiré de Milnor.
- Hempel, John (1976) 3-Manifolds . Presse universitaire de Princeton. ISBN 0-8218-3695-1 .
- Hirsch, Morris , (1997) Topologie différentielle . Édition Springer. ISBN 0-387-90148-5 . Le récit le plus complet, avec des aperçus historiques et des problèmes excellents, mais difficiles. La référence standard pour ceux qui souhaitent avoir une compréhension approfondie du sujet.
- Kirby, Robion C. et Siebenmann, Laurence C. (1977) Essais fondamentaux sur les collecteurs topologiques. Lissages, et Triangulations . Presse universitaire de Princeton. ISBN 0-691-08190-5 . Une étude détaillée de la catégorie des variétés topologiques.
- Lee, John M. (2000) Introduction aux collecteurs topologiques . Springer Verlag. ISBN 0-387-98759-2 . Texte d’études supérieures détaillé et complet de première année.
- Lee, John M. (2003) Introduction aux collecteurs lisses . Springer Verlag. ISBN 0-387-95495-3 . Texte d’études supérieures détaillé et complet de première année; suite de Introduction to Topological Manifolds .
- Massey, William S. (1977) Topologie algébrique : une introduction . Springer Verlag. ISBN 0-387-90271-6 .
- Milnor, John (1997) Topologie du point de vue différentiable . Presse universitaire de Princeton. ISBN 0-691-04833-9 . Brève introduction classique à la topologie différentielle.
- Munkres, James R. (1991) Analyse sur les variétés . Addison-Wesley (réimprimé par Westview Press) ISBN 0-201-51035-9 . Texte de premier cycle traitant des variétés dans R n {displaystyle mathbb{R} ^{n}}
.
- Munkres, James R. (2000) Topologie . Prentice Hall. ISBN 0-13-181629-2 .
- Neuwirth, LP, éd. (1975) Noeuds, groupes et 3-variétés. Documents dédiés à la mémoire de RH Fox . Presse universitaire de Princeton. ISBN 978-0-691-08170-0 .
- Riemann, Bernhard , Gesammelte mathematische Werke und wissenschaftlicher Nachlass , Sändig Reprint. ISBN 3-253-03059-8 .
- Grundlagen für eine allgemeine Theorie der Functionen einer veränderlichen complexen Grösse. La thèse de doctorat de 1851 dans laquelle “manifold” ( Mannigfaltigkeit ) apparaît pour la première fois.
- Ueber die Hypothesen, welche der Geometrie zu Grunde liegen. La leçon inaugurale de Göttingen de 1854 ( Habilitationsschrift ).
- Spivak, Michael (1965) Calcul sur les collecteurs : une approche moderne des théorèmes classiques du calcul avancé . WA Benjamin Inc. (réimprimé par Addison-Wesley et Westview Press). ISBN 0-8053-9021-9 . Texte de premier cycle avancé et de première année réputé laconique .
- Spivak, Michael (1999) A Comprehensive Introduction to Differential Geometry (3e édition) Publish or Perish Inc. Série encyclopédique en cinq volumes présentant un traitement systématique de la théorie des variétés, de la géométrie riemannienne, de la géométrie différentielle classique et de nombreux autres sujets au premier – et les cycles supérieurs de deuxième année.
- Tu, Loring W. (2011). Une introduction aux collecteurs (2e éd.). New York : Springer. ISBN 978-1-4419-7399-3.. Texte concis de première année.
Liens externes
- “Manifold” , Encyclopédie des mathématiques , EMS Press , 2001 [1994]
- Dimensions-math.org (Un film expliquant et visualisant les variétés jusqu’à la quatrième dimension.)
- Le projet d’ atlas multiple du Max Planck Institute for Mathematics à Bonn