Véhicule aérien sans pilote
Un véhicule aérien sans pilote ( UAV ), communément appelé drone , est un aéronef sans pilote humain , équipage ou passagers à bord. Les UAV sont un composant d’un système d’aéronef sans pilote (UAS) , qui comprend l’ajout d’un contrôleur au sol et d’un système de communication avec l’UAV. [1] Le vol des UAV peut fonctionner sous contrôle à distance par un opérateur humain, en tant qu’aéronef télépiloté ( RPA ), ou avec divers degrés d’ autonomie , comme l’ assistance au pilote automatique , jusqu’à des aéronefs entièrement autonomes qui ne prévoient aucune intervention humaine . [2][3]
 Décollage de l’avion sans pilote Elbit Systems Hermes-450
Décollage de l’avion sans pilote Elbit Systems Hermes-450  Northrop Grumman Bat transportant des capteurs EO/IR et SAR, des télémètres laser, des désignateurs laser, des caméras infrarouges
Northrop Grumman Bat transportant des capteurs EO/IR et SAR, des télémètres laser, des désignateurs laser, des caméras infrarouges  Un drone quadricoptère DJI Phantom pour la photographie aérienne commerciale et récréative
Un drone quadricoptère DJI Phantom pour la photographie aérienne commerciale et récréative  Un General Atomics MQ-9 Reaper , un drone de surveillance chasseur-tueur
Un General Atomics MQ-9 Reaper , un drone de surveillance chasseur-tueur  Bien que la plupart des UAV militaires soient des aéronefs à voilure fixe , des giravions (c’est-à-dire des RUAV) tels que ce MQ-8B Fire Scout sont également utilisés.
Bien que la plupart des UAV militaires soient des aéronefs à voilure fixe , des giravions (c’est-à-dire des RUAV) tels que ce MQ-8B Fire Scout sont également utilisés.  Prototype de Sukhoi S-70 Okhotnik-B , un UCAV lourd
Prototype de Sukhoi S-70 Okhotnik-B , un UCAV lourd
Les drones ont été développés à l’origine au XXe siècle pour des missions militaires trop “ennuyeuses, sales ou dangereuses” [4] pour les humains, et au XXIe, ils étaient devenus des atouts essentiels pour la plupart des militaires. Au fur et à mesure que les technologies de contrôle s’amélioraient et que les coûts diminuaient, leur utilisation s’est étendue à de nombreuses applications non militaires. [5] [6] Ceux-ci incluent la surveillance des incendies de forêt, [1] la photographie aérienne , les livraisons de produits , l’agriculture , le maintien de l’ordre et la surveillance, les inspections des infrastructures, la science, [7] [8] [9] [10] la contrebande, [11] et courses de drones .
Terminologie
De nombreux termes sont utilisés pour les aéronefs qui volent sans personne à bord.
Le terme drone a été utilisé dès les premiers jours de l’aviation, appliqué aux avions cibles télécommandés utilisés pour s’entraîner au tir des canons d’un cuirassé, comme le Fairey Queen des années 1920 et le de Havilland Queen Bee des années 1930 . Les exemples ultérieurs comprenaient l ‘ Airspeed Queen Wasp et le Miles Queen Martinet , avant leur remplacement ultime par le GAF Jindivik . [12] Le terme reste d’usage courant.
Un véhicule aérien sans pilote (UAV) est défini comme un “véhicule aérien motorisé qui ne transporte pas d’opérateur humain, utilise des forces aérodynamiques pour assurer la portance du véhicule, peut voler de manière autonome ou être piloté à distance, peut être consommable ou récupérable et peut transporter un charge utile létale ou non létale ». [13] UAV est un terme couramment appliqué aux cas d’utilisation militaire. [14] Cependant , les missiles à ogives ne sont pas considérés comme des UAV car le véhicule lui-même est une munition.
Le terme système d’aéronef sans pilote ( UAS ) a été adopté par le département de la Défense des États-Unis (DoD) et la Federal Aviation Administration (FAA) des États-Unis en 2005 selon leur feuille de route du système d’aéronef sans pilote 2005-2030. [15] L’ Organisation de l’aviation civile internationale (OACI) et l’ Autorité de l’aviation civile britannique ont adopté ce terme, également utilisé dans la feuille de route de la recherche sur la gestion du trafic aérien (SESAR Joint Undertaking) de l’Union européenne. pour 2020. [16]Ce terme met l’accent sur l’importance d’éléments autres que l’aéronef. Il comprend des éléments tels que des stations de contrôle au sol, des liaisons de données et d’autres équipements de soutien. Un terme similaire est un système de véhicule aérien sans pilote (UAVS), un véhicule aérien piloté à distance (RPAV), un système d’aéronef piloté à distance (RPAS). [17] De nombreux termes similaires sont utilisés. “Inoccupé” et “inhabité” sont parfois utilisés comme alternatives à “sans pilote”. [18]
En plus du logiciel, les drones autonomes utilisent également une multitude de technologies avancées qui leur permettent de mener à bien leurs missions sans intervention humaine, telles que le cloud computing, la vision par ordinateur, l’intelligence artificielle, l’apprentissage automatique, l’apprentissage en profondeur et les capteurs thermiques. [19]
En vertu d’une nouvelle réglementation entrée en vigueur le 1er juin 2019, le terme RPAS ( Remotely Piloted Aircraft System ) a été adopté par le gouvernement canadien pour désigner « un ensemble d’éléments configurables constitué d’un aéronef télépiloté, de son poste de contrôle, du poste de commande et de contrôle liaisons et tout autre élément du système requis pendant le fonctionnement du vol ». [20]
La relation entre les UAV et les modèles réduits d’aéronefs télécommandés n’est pas claire. [ citation nécessaire ] Les UAV peuvent ou non inclure des modèles réduits d’avions. Certaines juridictions fondent leur définition sur la taille ou le poids; cependant, la FAA des États-Unis définit tout engin volant sans équipage comme un UAV, quelle que soit sa taille. Pour des utilisations récréatives, un drone (par opposition à un UAV) est un modèle réduit d’avion doté de la vidéo à la première personne, de capacités autonomes ou des deux. [21]
Classements
| Apprendre encore plus Cette section a besoin de citations supplémentaires pour vérification . ( mai 2021 ) Please help improve this article by adding citations to reliable sources. Unsourced material may be challenged and removed. (Learn how and when to remove this template message) |
Les drones peuvent être classés comme n’importe quel autre aéronef , selon la configuration de conception telle que le poids ou le type de moteur, l’altitude de vol maximale, le degré d’autonomie opérationnelle, le rôle opérationnel, etc.
Basé sur le poids
En fonction de leur poids, les drones peuvent être classés en cinq catégories – nano (pesant jusqu’à 250 g), Micro véhicules aériens (MAV) (250 g – 2 kg), UAV miniature ou petit (SUAV) (2-25 kg), moyen (25–150 kg) et grand (plus de 150 kg). [22]
Selon le degré d’autonomie
Les drones pourraient également être classés en fonction du degré d’autonomie de leurs opérations de vol. L’OACI classe les aéronefs sans équipage comme des aéronefs télépilotés ou entièrement autonomes. [23] Certains drones offrent des degrés d’autonomie intermédiaires. Par exemple, un véhicule qui est piloté à distance dans la plupart des contextes mais qui a une opération de retour à la base autonome. Certains types d’aéronefs peuvent éventuellement voler avec équipage ou en tant qu’UAV, ce qui peut inclure des aéronefs avec équipage transformés en UAV sans équipage ou pilotés en option (OPV).
Basé sur l’altitude
Sur la base de l’altitude, les classifications d’UAV suivantes ont été utilisées lors d’événements de l’industrie tels que le forum ParcAberporth Unmanned Systems :
- Altitude portative de 2 000 pieds (600 m), portée d’environ 2 km
- Près de 5 000 pieds (1 500 m) d’altitude, jusqu’à 10 km de portée
- Type OTAN 10 000 pieds (3 000 m) d’altitude, portée jusqu’à 50 km
- Altitude tactique de 18 000 pieds (5 500 m), portée d’environ 160 km
- MALE (moyenne altitude, longue endurance) jusqu’à 30 000 pieds (9 000 m) et portée supérieure à 200 km
- HALE (haute altitude, longue endurance) sur 30 000 pieds (9 100 m) et portée indéfinie
- Hypersonique à grande vitesse, supersonique (Mach 1–5) ou hypersonique (Mach 5+) 50 000 pieds (15 200 m) ou altitude suborbitale, portée supérieure à 200 km
- Orbite terrestre basse orbitale (Mach 25+)
- Transfert Terre-Lune lunaire de la CEI
- Système de guidage de transporteur assisté par ordinateur (CACGS) pour UAV
Sur la base des critères composites
Un exemple de classification basée sur les critères composites est la classification des systèmes aériens sans pilote (UAS) de l’armée américaine des UAV basée sur le poids, l’altitude maximale et la vitesse du composant UAV.
Histoire
 Winston Churchill et d’autres attendent pour assister au lancement d’un drone cible de Havilland Queen Bee , 6 juin 1941
Winston Churchill et d’autres attendent pour assister au lancement d’un drone cible de Havilland Queen Bee , 6 juin 1941  Un Ryan Firebee , l’un d’une série de drones cibles/véhicules aériens sans pilote qui ont volé pour la première fois en 1951. Musée de l’armée de l’air israélienne , base aérienne de Hatzerim, Israël, 2006
Un Ryan Firebee , l’un d’une série de drones cibles/véhicules aériens sans pilote qui ont volé pour la première fois en 1951. Musée de l’armée de l’air israélienne , base aérienne de Hatzerim, Israël, 2006  Derniers préparatifs avant la première mission tactique de drone à travers le canal de Suez (1969). Debout : le major Shabtai Brill du corps de renseignement israélien, l’innovateur du drone tactique.
Derniers préparatifs avant la première mission tactique de drone à travers le canal de Suez (1969). Debout : le major Shabtai Brill du corps de renseignement israélien, l’innovateur du drone tactique.  Le Tadiran Mastiff israélien , qui a volé pour la première fois en 1975, est considéré par beaucoup [ quantifier ] comme le premier drone de champ de bataille moderne, en raison de son système de liaison de données, de son endurance et de sa diffusion vidéo en direct. [24]
Le Tadiran Mastiff israélien , qui a volé pour la première fois en 1975, est considéré par beaucoup [ quantifier ] comme le premier drone de champ de bataille moderne, en raison de son système de liaison de données, de son endurance et de sa diffusion vidéo en direct. [24]
Les premiers drones
La première utilisation enregistrée d’un véhicule aérien sans pilote pour la guerre a eu lieu en juillet 1849, [25] avec un porte-ballons (le précurseur du porte-avions ) [26] lors de la première utilisation offensive de la Puissance aérienne dans l’aviation navale . [27] [28] [29] Les forces autrichiennes assiégeant Venise ont tenté de lancer quelque 200 ballons incendiaires sur la ville assiégée. Les ballons ont été lancés principalement depuis la terre; cependant, certains ont également été lancés à partir du navire autrichien SMS Vulcano. Au moins une bombe est tombée dans la ville ; cependant, en raison du changement de vent après le lancement, la plupart des ballons ont raté leur cible et certains sont revenus au-dessus des lignes autrichiennes et du navire de lancement Vulcano . [30] [31] [32]
L’ingénieur espagnol Leonardo Torres y Quevedo a introduit un système de contrôle basé sur la radio appelé ” Telekino ” à l’ Académie des Sciences de Paris en 1903 avec l’intention de tester un dirigeable de sa propre conception sans risquer de vies humaines. [33] [34]
Le développement important des drones a commencé dans les années 1900 et se concentrait à l’origine sur la fourniture de cibles d’entraînement pour la formation du personnel militaire. La première tentative d’UAV propulsé fut la «cible aérienne» d’ AM Low en 1916. [35] Low confirma que le monoplan de Geoffrey de Havilland était celui qui volait sous contrôle le 21 mars 1917 en utilisant son système radio. [36] À la suite de cette démonstration réussie au printemps 1917, Low a été transféré pour développer des DCB de lancements de moteurs rapides contrôlés par avion avec la Royal Navy en 1918 destinés à attaquer les installations maritimes et portuaires et il a également aidé le commandant d’escadre Brock dans les préparatifs du raid de Zeebrugge . AutreDes développements britanniques sans pilote ont suivi, conduisant à la flotte de plus de 400 cibles aériennes de Havilland 82 Queen Bee qui sont entrées en service en 1935.
Nikola Tesla a décrit une flotte de véhicules de combat aérien sans équipage en 1915. [37] Ces développements ont également inspiré la construction du Kettering Bug par Charles Kettering de Dayton, Ohio et de l’ avion automatique Hewitt-Sperry – initialement conçu comme un avion sans équipage qui transporterait une charge utile explosive vers une cible prédéterminée. Le développement s’est poursuivi pendant la Première Guerre mondiale, lorsque la Dayton-Wright Airplane Company a inventé une torpille aérienne sans pilote qui exploserait à une heure prédéfinie. [38]
La star de cinéma et amateur de modèles réduits d’avions Reginald Denny a développé le premier véhicule télépiloté à l’échelle en 1935. [35]
Des chercheurs soviétiques ont expérimenté le contrôle à distance des bombardiers Tupolev TB-1 à la fin des années 1930. [39]
La Seconde Guerre mondiale
En 1940, Denny a lancé la Radioplane Company et d’autres modèles ont émergé pendant la Seconde Guerre mondiale – utilisés à la fois pour former des artilleurs antiaériens et pour effectuer des missions d’attaque. L’Allemagne nazie a produit et utilisé divers avions UAV pendant la guerre, comme l’ Argus As 292 et la bombe volante V-1 avec un moteur à réaction .
Période d’après-guerre
Après la Seconde Guerre mondiale, le développement s’est poursuivi dans des véhicules tels que l’américain JB-4 (utilisant le guidage par télévision / radio-commande), l’australien GAF Jindivik et Teledyne Ryan Firebee I de 1951, tandis que des entreprises comme Beechcraft proposaient leur modèle 1001 pour l’ US Navy en 1955. [35] Néanmoins, ils n’étaient guère plus que des avions télécommandés jusqu’à la guerre du Vietnam . En 1959, l’ US Air Force , préoccupée par la perte de pilotes en territoire hostile, a commencé à planifier l’utilisation d’avions sans équipage. [40] La planification s’est intensifiée après l’ Union soviétique a abattu un U-2 en 1960. En quelques jours, un programme d’UAV hautement classifié a commencé sous le nom de code de “Red Wagon”. [41] L’affrontement d’août 1964 dans le golfe du Tonkin entre des unités navales des États-Unis et de la Marine nord-vietnamienne a lancé les drones américains hautement classifiés ( Ryan Model 147 , Ryan AQM-91 Firefly , Lockheed D-21 ) dans leurs premières missions de combat de la guerre du Vietnam . [42] Lorsque le gouvernement chinois [43] a montré des photographies d’UAV américains abattus via Wide World Photos , [44] la réponse officielle des États-Unis a été « sans commentaire ».
Pendant la guerre d’usure (1967-1970) au Moyen-Orient, les services de renseignement israéliens ont testé les premiers drones tactiques installés avec des caméras de reconnaissance , qui ont réussi à renvoyer des photos de l’autre côté du canal de Suez. C’était la première fois que des drones tactiques pouvant être lancés et atterris sur n’importe quelle piste courte (contrairement aux drones à réaction plus lourds) étaient développés et testés au combat. [45]
Lors de la guerre du Yom Kippour en 1973 , Israël a utilisé des drones comme leurres pour inciter les forces adverses à gaspiller des missiles anti-aériens coûteux. [46] Après la guerre de Yom Kippour en 1973, quelques personnes clés de l’équipe qui a développé ce premier UAV ont rejoint une petite start-up qui visait à développer les UAV en un produit commercial, finalement acheté par Tadiran et menant au développement du premier drone israélien. UAV. [47] [ pages nécessaires ]
En 1973, l’armée américaine a officiellement confirmé qu’elle avait utilisé des drones en Asie du Sud-Est (Vietnam). [48] Plus de 5 000 aviateurs américains avaient été tués et plus de 1 000 autres étaient portés disparus ou capturés . La 100e Escadre de reconnaissance stratégique de l’ USAF a effectué environ 3 435 missions de drones pendant la guerre [49] pour un coût d’environ 554 drones perdus, toutes causes confondues. Selon les mots du Général de l’USAF George S. Brown , commandant de l’Air Force Systems Command , en 1972, “La seule raison pour laquelle nous avons besoin (des UAV) est que nous ne voulons pas dépenser inutilement l’homme dans le cockpit.” [50] Plus tard cette année-là, le Général John C. Meyer , commandant en chef,Le Commandement aérien stratégique , a déclaré : “nous laissons le drone faire le vol à haut risque… le taux de perte est élevé, mais nous sommes prêts à en risquer davantage… ils sauvent des vies !” [50]
Pendant la guerre du Yom Kippour en 1973 , les batteries de missiles sol-air fournies par les Soviétiques en Égypte et en Syrie ont causé de lourds dégâts aux avions de chasse israéliens . En conséquence, Israël a développé l’ IAI Scout en tant que premier UAV avec surveillance en temps réel. [51] [52] [53] Les images et les leurres radar fournis par ces drones ont aidé Israël à neutraliser complètement les défenses aériennes syriennes au début de la guerre du Liban de 1982 , ce qui n’a entraîné aucun pilote abattu. [54]En Israël, en 1987, les drones ont été utilisés pour la première fois comme preuve de concept de super-agilité, vol contrôlé après décrochage dans des simulations de vol de combat qui impliquaient un contrôle de vol tridimensionnel sans queue, basé sur la technologie furtive, et direction à réaction. [55]
UAV modernes
Avec la maturation et la miniaturisation des technologies applicables dans les années 1980 et 1990, l’intérêt pour les drones s’est accru au sein des échelons supérieurs de l’armée américaine. Dans les années 1990, le DoD américain a donné un contrat à AAI Corporation avec la société israélienne Malat. La Marine américaine a acheté le drone AAI Pioneer qu’AAI et Malat ont développé conjointement. Bon nombre de ces UAV ont servi pendant la guerre du Golfe de 1991 . Les drones ont démontré la possibilité de machines de combat moins chères et plus performantes, pouvant être déployées sans risque pour les équipages. Les générations initiales impliquaient principalement des avions de surveillance , mais certains transportaient des armements , tels que le General Atomics MQ-1 Predator , qui lançait des missiles air-sol AGM-114 Hellfire . .
CAPECON , un projet de l’Union européenne pour développer des UAV, [56] s’est déroulé du 1er mai 2002 au 31 décembre 2005. [57]
En 2012 , [update]l’ US Air Force (USAF) employait 7 494 drones, soit près d’un avion de l’USAF sur trois. [58] [59] La Central Intelligence Agency a également exploité des UAV . [60] En 2013, au moins 50 pays utilisaient des drones. La Chine, l’Iran, Israël, le Pakistan, la Turquie et d’autres [ lesquels ? ] ont conçu et construit leurs propres variétés. L’utilisation des drones n’a cessé d’augmenter. [61] En raison de leur large prolifération, aucune liste complète des systèmes UAV n’existe. [59] [62]
Le développement de technologies intelligentes et l’amélioration des systèmes d’alimentation électrique ont entraîné une augmentation parallèle de l’utilisation des drones pour les activités grand public et d’aviation générale. À partir de 2021, les drones quadricoptères illustrent la popularité généralisée des avions et des jouets radiocommandés de loisirs , mais l’utilisation des drones dans l’aviation commerciale et générale est limitée par un manque d’autonomie [ clarification nécessaire ] et par de nouveaux environnements réglementaires qui nécessitent une ligne de – contact à vue avec le pilote. [ citation nécessaire ]
En 2020, un drone Kargu 2 a traqué et attaqué une cible humaine en Libye , selon un rapport du Groupe d’experts du Conseil de sécurité de l’ONU sur la Libye, publié en mars 2021. C’était peut-être la première fois qu’un robot-tueur autonome armés d’armes meurtrières ont attaqué des êtres humains. [63] [64]
La technologie supérieure des drones a joué un rôle dans les succès de l’Azerbaïdjan dans la guerre du Haut-Karabakh de 2020 contre l’Arménie. [65]
 Vue d’artiste de l’atterrissage de Dragonfly sur Titan.
Vue d’artiste de l’atterrissage de Dragonfly sur Titan.
Les drones sont également utilisés dans les missions de la NASA . Le vaisseau spatial Dragonfly est en cours de développement et vise à atteindre et à examiner Titan , la lune de Saturne . Son objectif principal est de se déplacer autour de la surface, en élargissant la zone à rechercher précédemment vue par Landers . En tant que drone, Dragonfly permet d’examiner des types de sol potentiellement divers. Le drone devrait être lancé en 2027, et on estime qu’il faudra encore sept ans pour atteindre le système saturnien.
Concevoir
| Apprendre encore plus Cette section a besoin de citations supplémentaires pour vérification . ( mai 2016 ) Please help improve this article by adding citations to reliable sources. Unsourced material may be challenged and removed. (Learn how and when to remove this template message) |
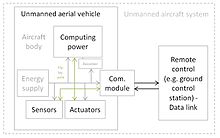 Structure physique générale d’un drone
Structure physique générale d’un drone
Les aéronefs avec équipage et sans équipage du même type ont généralement des composants physiques similaires reconnaissables. Les principales exceptions sont le poste de pilotage et le système de contrôle de l’environnement ou les systèmes de survie . Certains drones transportent des charges utiles (telles qu’une caméra) qui pèsent considérablement moins qu’un humain adulte et, par conséquent, peuvent être considérablement plus petites. Bien qu’ils transportent de lourdes charges utiles, les UAV militaires armés sont plus légers que leurs homologues avec équipage dotés d’armements comparables.
Les petits drones civils n’ont pas de systèmes vitaux et peuvent donc être construits à partir de matériaux et de formes plus légers mais moins robustes, et peuvent utiliser des systèmes de contrôle électroniques moins robustes. Pour les petits drones, la conception du quadricoptère est devenue populaire, bien que cette disposition soit rarement utilisée pour les avions avec équipage. La miniaturisation signifie que des technologies de propulsion moins puissantes peuvent être utilisées, ce qui n’est pas faisable pour les aéronefs avec équipage, comme les petits moteurs électriques et les batteries.
Les systèmes de contrôle des UAV sont souvent différents de ceux des embarcations avec équipage. Pour le contrôle humain à distance, une caméra et une liaison vidéo remplacent presque toujours les hublots du cockpit ; les commandes numériques transmises par radio remplacent les commandes physiques du poste de pilotage. Le logiciel de pilote automatique est utilisé à la fois sur les aéronefs avec équipage et sans équipage, avec des ensembles de fonctionnalités variables.
Configuration de l’avion
La principale différence avec les avions habités est l’absence de besoin d’un poste de pilotage et de ses hublots. Cependant, certains types sont adaptés à partir d’exemples pilotes ou sont conçus pour des modes opérationnels pilotés ou sans pilote en option. La sécurité aérienne est également moins une exigence critique pour les aéronefs sans pilote, ce qui permet au concepteur une plus grande liberté d’expérimentation. Ces deux facteurs ont conduit à une grande variété de configurations de cellules et de moteurs dans les UAV.
Pour le vol conventionnel, l’ aile volante et le corps d’aile mixte offrent un poids léger combiné à une faible traînée et furtivité , et sont des configurations populaires. Les types plus grands qui transportent une charge utile variable sont plus susceptibles de comporter un fuselage distinct avec une queue pour la stabilité, le contrôle et l’assiette, bien que les configurations d’ailes utilisées varient considérablement.
Pour le vol vertical, le quadricoptère sans queue nécessite un système de contrôle relativement simple et est courant pour les petits drones. Cependant, le mécanisme ne s’adapte pas bien aux avions plus gros, qui ont tendance à utiliser un rotor unique conventionnel avec commande de pas collectif et cyclique, ainsi qu’un rotor de queue stabilisateur. [66]
Propulsion
Les moteurs à combustion interne et à réaction traditionnels restent utilisés pour les drones nécessitant une longue portée. Cependant, pour les missions à courte portée, l’énergie électrique a presque entièrement pris le relais. Le record de distance pour un UAV (construit à partir de bois de balsa et de peau de mylar) à travers l’océan Atlantique Nord est détenu par un modèle réduit d’avion à essence ou UAV. Manard Hill “en 2003, lorsqu’une de ses créations a volé 1 882 miles à travers l’océan Atlantique avec moins d’un gallon de carburant” détient ce record. [67]
Outre le moteur à piston traditionnel, le moteur rotatif Wankel est utilisé par certains drones. Ce type offre une puissance de sortie élevée pour un poids réduit, avec un fonctionnement plus silencieux et sans vibrations. Des revendications ont également été faites pour une fiabilité améliorée et une plus grande portée. [ citation nécessaire ]
Les petits drones utilisent principalement des batteries lithium-polymère (Li-Po), tandis que certains véhicules plus gros ont adopté une pile à hydrogène . La densité énergétique des batteries Li-Po modernes est bien inférieure à celle de l’essence ou de l’hydrogène. Cependant, les moteurs électriques sont moins chers, plus légers et plus silencieux. Des installations complexes multimoteurs et multihélices sont en cours de développement dans le but d’améliorer l’efficacité aérodynamique et propulsive. Pour ces installations électriques complexes, des circuits d’élimination de batterie (BEC) peuvent être utilisés pour centraliser la distribution d’énergie et minimiser le chauffage, sous le contrôle d’une unité de microcontrôleur (MCU).
Ornithoptères – propulsion des ailes
Des ornithoptères à ailes battantes , imitant des oiseaux ou des insectes, ont été pilotés en tant que microUAV . Leur furtivité inhérente les recommande pour les missions d’espionnage.
Des microUAV de moins de 1 g inspirés des mouches, bien qu’utilisant une attache électrique, ont pu “atterrir” sur des surfaces verticales. [68] D’autres projets imitent le vol des coléoptères et d’autres insectes. [69]
Systèmes de contrôle informatique
 Un contrôleur de vol exécuté sur le micrologiciel CleanFlight ou BaseFlight pour les drones multirotors
Un contrôleur de vol exécuté sur le micrologiciel CleanFlight ou BaseFlight pour les drones multirotors
La capacité informatique des drones a suivi les progrès de la technologie informatique, en commençant par les commandes analogiques et en évoluant vers les microcontrôleurs, puis les systèmes sur puce (SOC) et les ordinateurs à carte unique (SBC).
Le matériel système des petits drones est souvent appelé contrôleur de vol (FC), carte contrôleur de vol (FCB) ou pilote automatique.
Architecture
Capteurs
Les capteurs de position et de mouvement donnent des informations sur l’état de l’avion. Les capteurs extéroceptifs traitent des informations externes telles que les mesures de distance, tandis que les capteurs exproprioceptifs corrèlent les états internes et externes. [70]
Les capteurs non coopératifs sont capables de détecter des cibles de manière autonome afin qu’ils soient utilisés pour assurer la séparation et éviter les collisions. [71]
Les degrés de liberté (DOF) font référence à la fois à la quantité et à la qualité des capteurs à bord : 6 DOF implique des gyroscopes et des accéléromètres à 3 axes (une unité de mesure inertielle typique – IMU), 9 DOF fait référence à une IMU plus une boussole, 10 DOF ajoute un baromètre et 11 DOF ajoute généralement un récepteur GPS. [72]
Actionneurs
Les actionneurs d’ UAV comprennent des contrôleurs de vitesse électroniques numériques (qui contrôlent le régime des moteurs) liés aux moteurs/ moteurs et aux hélices , des servomoteurs (pour les avions et les hélicoptères principalement), des armes, des actionneurs de charge utile, des LED et des haut-parleurs.
Logiciel
| Apprendre encore plus Cette rubrique doit être mise à jour . ( Février 2022 ) Please help update this article to reflect recent events or newly available information. |
Logiciel UAV appelé pile de vol ou pilote automatique. Le but de la pile de vol est d’obtenir des données à partir de capteurs, de contrôler les moteurs pour assurer la stabilité du drone et de faciliter la communication au sol et la planification de la mission. [73]
Les UAV sont des systèmes en temps réel qui nécessitent une réponse rapide à l’évolution des données des capteurs. Par conséquent, les drones s’appuient sur des ordinateurs à carte unique pour leurs besoins de calcul. Des exemples de tels ordinateurs à carte unique incluent Raspberry Pis , Beagleboards , etc. blindés avec NavIO , PXFMini , etc. ou conçus à partir de zéro tels que NuttX , préemptif- RT Linux , Xenomai , Orocos-Robot Operating System ou DDS-ROS 2.0 .
| Couche | Exigence | Opérations | Exemple |
|---|---|---|---|
| Micrologiciel | Temps critique | Du code machine à l’exécution du processeur, accès mémoire | ArduCopter-v1, PX4 |
| Intergiciel | Temps critique | Contrôle de vol, navigation, gestion radio | PX4, Cleanflight, ArduPilot |
| Système opérateur | Intensif en informatique | Flux optique, évitement d’obstacles, SLAM, prise de décision | ROS, Nuttx, distributions Linux, Microsoft IOT |
Les piles open source à usage civil incluent :
- ArduCopter
- fouflie
- KKMultiCopter
- Multi Wii
- BaseFlight (bifurqué de MultiWii)
- CleanFlight (bifurqué de BaseFlight)
- BetaFlight (bifurqué de CleanFlight)
- iNav (bifurqué de CleanFlight)
- RaceFlight (bifurqué de CleanFlight)
- CleanFlight (bifurqué de BaseFlight)
- BaseFlight (bifurqué de MultiWii)
- OpenPilot
- dRonin (bifurqué d’OpenPilot)
- LibrePilot (bifurqué d’OpenPilot)
- TauLabs (bifurqué d’OpenPilot)
- Paparazzi
- Pilote automatique PX4
- DroneCode (organisation faîtière gérant PX4 au sein de la Linux Foundation )
En raison de la nature open source des logiciels UAV, ils peuvent être personnalisés pour s’adapter à des applications spécifiques. Par exemple, des chercheurs de l’Université technique de Košice ont remplacé l’algorithme de contrôle par défaut du pilote automatique PX4. [74] Cette flexibilité et cet effort de collaboration ont conduit à un grand nombre de piles open source différentes, dont certaines sont dérivées d’autres, telles que CleanFlight, qui est dérivée de BaseFlight et à partir de laquelle trois autres piles sont dérivées.
Principes de la boucle 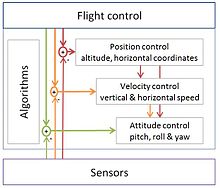 Boucles de commande de vol typiques pour un multirotor
Boucles de commande de vol typiques pour un multirotor
Les UAV utilisent des architectures de contrôle en boucle ouverte, en boucle fermée ou hybrides.
- Boucle ouverte – Ce type fournit un signal de contrôle positif (plus rapide, plus lent, gauche, droite, haut, bas) sans incorporer le retour des données du capteur.
- Boucle fermée – Ce type intègre un retour de capteur pour ajuster le comportement (réduire la vitesse pour refléter le vent arrière, passer à une altitude de 300 pieds). Le régulateur PID est commun. Parfois, l’ anticipation est utilisée, transférant le besoin de boucler davantage la boucle. [75]
Communication
Les drones utilisent une radio pour le contrôle et l’ échange de vidéo et d’autres données . Les premiers drones n’avaient qu’une liaison montante à bande étroite . Les liaisons descendantes sont venues plus tard. Ces liaisons radio bidirectionnelles à bande étroite transportaient des données de commande et de contrôle (C&C) et de télémétrie sur l’état des systèmes de l’avion jusqu’à l’opérateur distant.
Dans la plupart des applications UAV modernes, la transmission vidéo est nécessaire. Ainsi, au lieu d’avoir des liaisons séparées pour le C&C, la télémétrie et le trafic vidéo, une liaison à large bande est utilisée pour transporter tous les types de données. Ces liaisons large bande peuvent tirer parti des techniques de qualité de service et acheminer le trafic TCP/IP qui peut être acheminé sur Internet.
Le signal radio du côté opérateur peut provenir soit :
- Contrôle au sol – un humain utilisant un émetteur / récepteur radio, un smartphone, une tablette, un ordinateur ou la signification originale d’une station de contrôle au sol militaire (GCS) .
- Système de réseau distant, tel que les liaisons de données duplex par satellite pour certaines puissances militaires . La vidéo numérique en aval sur les réseaux mobiles a également pénétré les marchés grand public, tandis que la liaison montante de contrôle direct des UAV sur le maillage cellulaire et le LTE a été démontrée et est en cours d’essai. [76]
- Un autre avion, servant de relais ou de station de contrôle mobile – le teaming militaire sans pilote (MUM-T). [77]
Les normes de mise en réseau modernes ont explicitement pris en compte les drones et incluent donc des optimisations. La norme 5G a rendu obligatoire la réduction de la latence du plan utilisateur à 1 ms tout en utilisant des communications ultra-fiables et à faible latence. [78]
Autonomie
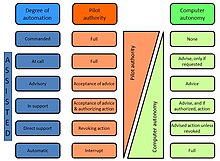 Degrés d’autonomie du drone
Degrés d’autonomie du drone
Le niveau d’autonomie des drones varie considérablement. Les fabricants d’UAV intègrent souvent des opérations autonomes spécifiques, telles que : [79]
- Self-level : stabilisation d’attitude sur les axes de tangage et de roulis.
- Maintien d’altitude : l’appareil maintient son altitude à l’aide de la pression barométrique et/ou des données GPS.
- Vol stationnaire/maintien de la position : Maintenez le tangage et le roulis, le cap et l’altitude en lacet stables tout en maintenant la position à l’aide du GNSS ou des capteurs inertiels.
- Mode sans tête : Contrôle du tangage par rapport à la position du pilote plutôt que par rapport aux axes du véhicule.
- Sans souci : contrôle automatique du roulis et du lacet lors du déplacement horizontal
- Décollage et atterrissage (à l’aide d’une variété de capteurs et de systèmes d’aéronefs ou au sol; voir aussi ” autoland “)
- Failsafe : atterrissage automatique ou retour à la maison en cas de perte de signal de contrôle
- Retour à la maison : volez vers le point de décollage (souvent en prenant d’abord de l’altitude pour éviter d’éventuels obstacles tels que des arbres ou des bâtiments).
- Suivez-moi : Maintenez une position relative par rapport à un pilote en mouvement ou à un autre objet à l’aide du GNSS, de la reconnaissance d’image ou d’une balise de guidage.
- Navigation par point de cheminement GPS : Utilisation du GNSS pour naviguer vers un emplacement intermédiaire sur un chemin de déplacement.
- Orbite autour d’un objet : Similaire à Follow-me mais encercle continuellement une cible.
- Acrobaties préprogrammées (comme des tonneaux et des loopings)
Une approche pour quantifier les capacités autonomes est basée sur la terminologie OODA , comme suggéré par un rapport du laboratoire de recherche de l’US Air Force de 2002 , et utilisé dans le tableau de droite. [80]
 Le X-47B reçoit du carburant d’un pétrolier Omega K-707
Le X-47B reçoit du carburant d’un pétrolier Omega K-707
Une autonomie totale est disponible pour des tâches spécifiques, telles que le ravitaillement en vol [81] ou la commutation de batteries au sol.
D’autres fonctions disponibles ou en cours de développement incluent ; vol collectif, évitement de collision en temps réel , suivi de mur, centrage de couloir, localisation et cartographie simultanées et essaimage , radio cognitive et apprentissage automatique .
Considérations relatives aux performances
Enveloppe de vol
Les UAV peuvent être programmés pour effectuer des manœuvres agressives ou atterrir/se percher sur des surfaces inclinées [82] , puis pour grimper vers de meilleurs points de communication. [83] Certains UAV peuvent contrôler le vol avec une modélisation de vol variable, [84] [85] comme les conceptions VTOL.
Les drones peuvent également se percher sur une surface verticale plane. [86]
Endurance
 Moteur UEL UAV-741 Wankel pour les opérations d’UAV
Moteur UEL UAV-741 Wankel pour les opérations d’UAV 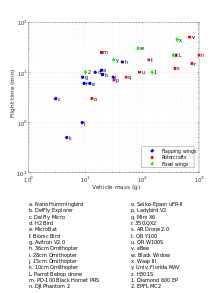 Temps de vol contre masse de petits drones (moins de 1 kg) [70]
Temps de vol contre masse de petits drones (moins de 1 kg) [70]
L’endurance des drones n’est pas limitée par les capacités physiologiques d’un pilote humain.
En raison de leur petite taille, de leur faible poids, de leurs faibles vibrations et de leur rapport puissance/poids élevé, les moteurs rotatifs Wankel sont utilisés dans de nombreux gros drones. Leurs rotors de moteur ne peuvent pas se gripper ; le moteur n’est pas sensible au refroidissement par choc lors de la descente et il ne nécessite pas de mélange carburé enrichi pour le refroidissement à haute puissance. Ces attributs réduisent la consommation de carburant, augmentent l’autonomie ou la charge utile.
Un bon refroidissement du drone est essentiel pour l’endurance à long terme du drone. La surchauffe et la panne de moteur qui en résulte sont la cause la plus fréquente de panne de drone. [87]
Les piles à combustible à hydrogène , utilisant l’énergie hydrogène, peuvent être en mesure de prolonger l’autonomie des petits drones, jusqu’à plusieurs heures. [88] [89] [90]
L’endurance des micro-véhicules aériens est jusqu’à présent mieux atteinte avec les drones à ailes battantes, suivis des avions et des multirotors en dernier, en raison du nombre de Reynolds inférieur . [70]
Les drones solaires électriques, un concept initialement défendu par l’AstroFlight Sunrise en 1974, ont atteint des temps de vol de plusieurs semaines.
Les satellites atmosphériques à énergie solaire (“atmosats”) conçus pour fonctionner à des altitudes supérieures à 20 km (12 miles ou 60 000 pieds) pendant cinq ans pourraient potentiellement effectuer des tâches de manière plus économique et avec plus de polyvalence que les satellites en orbite terrestre basse . Les applications probables incluent la surveillance météorologique , la reprise après sinistre , l’imagerie de la Terre et les communications.
Les drones électriques alimentés par transmission de puissance par micro-ondes ou faisceaux de puissance laser sont d’autres solutions d’endurance potentielles. [91]
Une autre application pour un UAV à haute endurance serait de “regarder” un champ de bataille pendant un long intervalle (ARGUS-IS, Gorgon Stare, Integrated Sensor Is Structure) pour enregistrer des événements qui pourraient ensuite être lus à l’envers pour suivre les activités du champ de bataille.
| UAV | Heures de vol : minutes |
Date | Remarques |
|---|---|---|---|
| Boeing Condor | 58:11 | 1989 | L’avion se trouve actuellement au Hiller Aviation Museum .
[92] |
| Moucheron atomique Général | 40:00 | 1992 | [93] [94] |
| TAM-5 | 38:52 | 11 août 2003 | Le plus petit drone à avoir traversé l’Atlantique
[95] |
| QinetiQ Zephyr Solaire Électrique | 54:00 | Septembre 2007 | [96] [97] |
| Faucon mondial RQ-4 | 33:06 | 22 mars 2008 | Établissez un record d’endurance pour un avion sans équipage opérationnel à grande échelle. [98] |
| QinetiQ Zephyr Solaire Électrique | 82:37 | 28–31 juillet 2008 | [99] |
| QinetiQ Zephyr Solaire Électrique | 336:22 | 9–23 juillet 2010 | [100] |
Fiabilité
Les améliorations de la fiabilité ciblent tous les aspects des systèmes UAV, en utilisant l’ ingénierie de la résilience et des techniques de tolérance aux pannes .
La fiabilité individuelle couvre la robustesse des contrôleurs de vol, pour assurer la sécurité sans redondance excessive afin de minimiser les coûts et le poids. [101] En outre, l’évaluation dynamique de l’enveloppe de vol permet des UAV résistants aux dommages, en utilisant une analyse non linéaire avec des boucles ou des réseaux de neurones conçus ad hoc. [102] La responsabilité des logiciels d’UAV s’oriente vers la conception et les certifications des logiciels d’avionique en équipage . [103]
La résilience en essaim implique le maintien des capacités opérationnelles et la reconfiguration des tâches en cas de défaillance de l’unité. [104]
Applications
Ces dernières années, les drones autonomes ont commencé à transformer divers domaines d’application car ils peuvent voler au-delà de la ligne de visée visuelle (BVLOS) [105] tout en maximisant la production, en réduisant les coûts et les risques, en garantissant la sûreté, la sécurité et la conformité réglementaire du site, [106] et protéger la main-d’œuvre humaine en temps de pandémie. [107] Ils peuvent également être utilisés pour des missions liées aux consommateurs comme la livraison de colis, comme le démontre Amazon Prime Air , et les livraisons critiques de fournitures médicales.
Il existe de nombreuses applications civiles, commerciales, militaires et aérospatiales pour les UAV. [6] Ceux-ci incluent :
Général Loisirs , secours aux sinistrés , archéologie , conservation de la biodiversité et de l’ habitat , application de la loi , crime et terrorisme . Commercial Surveillance aérienne , cinéma , journalisme , recherche scientifique , arpentage , transport de marchandises , exploitation minière , fabrication , foresterie , agriculture solaire , énergie thermique , ports et agriculture .
Guerre
 Un Baykar Bayraktar TB2 de l’ armée de l’air ukrainienne armé de MAM-L ; deux stations de contrôle au sol en arrière-plan
Un Baykar Bayraktar TB2 de l’ armée de l’air ukrainienne armé de MAM-L ; deux stations de contrôle au sol en arrière-plan
Avec des réductions de coûts considérables et des progrès dans la technologie des drones, les forces de défense du monde entier les utilisent de plus en plus pour diverses applications telles que la surveillance, la logistique, la communication, l’attaque et le combat. [108] [109] [110]
En 2020, dix-sept pays avaient des drones armés et plus de 100 pays utilisent des drones à titre militaire. [111] Le marché mondial des drones militaires est dominé par des entreprises basées aux États-Unis, en Turquie, [112] [113] en Chine, [114] en Israël et en Iran. [115] En nombre de ventes, les États-Unis détenaient plus de 60 % de part de marché militaire en 2017. Les principaux fabricants de drones militaires sont notamment General Atomics , Lockheed Martin , Northrop Grumman , Boeing , Baykar , [116] [113] TAI , IAIO , CASC et CAIG .[115] La Chine a établi et élargi sa présence sur le marché des UAV militaires [115] depuis 2010. La Turquie a également établi et élargi sa présence sur le marché des UAV militaires. [112] [115] [113] [116]
Sur les 18 pays connus pour avoir reçu des drones militaires entre 2010 et 2019, les 12 premiers ont tous acheté leurs drones en Chine. [115] Selon un rapport de 2015, les entreprises israéliennes se concentrent principalement sur les petits systèmes de drones de surveillance et par quantité de drones, Israël a exporté 60,7 % (2014) des drones sur le marché tandis que les États-Unis en exportent 23,9 % (2014). [117] Entre 2010 et 2014, il y a eu 439 drones échangés contre 322 au cours des cinq années précédentes, parmi ceux-ci seulement une petite fraction du commerce global – seulement 11 (2,5%) des 439 sont des drones armés. [117] Les États-Unis à eux seuls ont exploité plus de 9 000 drones militaires en 2014 ; parmi eux, plus de 7 000 sont des drones miniatures RQ-11 Raven . [118]General Atomics est le fabricant dominant avec la gamme de produits des systèmes Global Hawk et Predator/Mariner.
Pour les missions de renseignement et de reconnaissance, la furtivité inhérente aux ornithoptères à ailes battantes micro UAV , imitant les oiseaux ou les insectes, offre un potentiel de surveillance secrète et en fait des cibles difficiles à abattre.
Les UAV sont utilisés pour la reconnaissance , l’ attaque , le déminage et l’ entraînement à la cible .
Civil
 L’avion de Wing livrant des marchandises à Vuosaari , Helsinki.
L’avion de Wing livrant des marchandises à Vuosaari , Helsinki.
Le marché des drones civils (commerciaux et généraux) est dominé par les entreprises chinoises. Le fabricant chinois de drones DJI détenait à lui seul 74 % de la part du marché civil en 2018, aucune autre société ne représentant plus de 5 %, et avec des ventes mondiales prévues de 11 milliards de dollars en 2020 . Le ministère a immobilisé sa flotte de drones DJI en 2020, tandis que le ministère de la Justice a interdit l’utilisation de fonds fédéraux pour l’achat de DJI et d’autres UAV fabriqués à l’étranger. [120] [121] DJI est suivi par la société chinoise Yuneec , la société américaine 3D Robotics et la société française Parrot avec un écart important en termes de parts de marché. [122]En mai 2021, 873 576 drones ont été enregistrés auprès de la FAA américaine, dont 42 % sont classés comme drones commerciaux et 58 % comme drones récréatifs. [123] Le NPD de 2018 indique que les consommateurs achètent de plus en plus de drones dotés de fonctionnalités plus avancées avec une croissance de 33 % dans les segments de marché de 500 $ et plus et de 1 000 $ et plus. [124]
Le marché des drones civils est relativement nouveau par rapport au marché militaire. Des entreprises émergent à la fois dans les pays développés et en développement. De nombreuses startups en phase de démarrage ont reçu le soutien et le financement d’investisseurs comme c’est le cas aux États-Unis et d’agences gouvernementales comme c’est le cas en Inde. [125] Certaines universités offrent des programmes de recherche et de formation ou des diplômes. [126] Des entités privées proposent également des programmes de formation en ligne et en personne pour l’utilisation récréative et commerciale des UAV. [127]
Les drones grand public sont également largement utilisés par les organisations militaires du monde entier en raison de la nature rentable du produit de consommation. En 2018, l’armée israélienne a commencé à utiliser les séries de drones DJI Mavic et Matrice pour des missions de reconnaissance légère, car les drones civils sont plus faciles à utiliser et ont une plus grande fiabilité. Les drones DJI sont également le système aérien sans pilote commercial le plus largement utilisé par l’armée américaine. [128] [129] Des drones de surveillance DJI sont également utilisés par la police chinoise au Xinjiang depuis 2017. [130] [131]
Le marché mondial des drones atteindra 21,47 milliards de dollars américains, le marché indien atteignant la barre des 885,7 millions de dollars américains d’ici 2021. [132]
Les drones éclairés commencent à être utilisés dans les affichages nocturnes à des fins artistiques et publicitaires. [133]
Photographie aérienne
Les drones sont parfaitement adaptés à la capture de prises de vue aériennes en photographie et en cinématographie, et sont largement utilisés à cette fin. Les petits drones évitent le besoin d’une coordination précise entre le pilote et le caméraman, la même personne assumant les deux rôles. Cependant, pour les gros drones équipés de caméras professionnelles, il y a généralement un pilote de drone et un caméraman qui contrôlent l’angle et l’objectif de la caméra. Par exemple, le drone de cinéma AERIGON qui est utilisé dans la production cinématographique dans les grands films à succès est exploité par 2 personnes. [134] Les drones permettent d’accéder à des sites dangereux, éloignés ou autrement inaccessibles.
Agriculture et foresterie
Alors que la demande mondiale de production alimentaire augmente de façon exponentielle, que les ressources s’épuisent, que les terres agricoles sont réduites et que la main-d’œuvre agricole est de plus en plus rare, il existe un besoin urgent de solutions agricoles plus pratiques et plus intelligentes que les méthodes traditionnelles, et l’industrie des drones agricoles et de la robotique est devrait faire des progrès. [135] Des drones agricoles ont été utilisés dans des régions comme l’Afrique pour aider à construire une agriculture durable. [136]
L’utilisation d’UAV est également à l’étude pour aider à détecter et à combattre les incendies de forêt, que ce soit par l’observation ou le lancement de dispositifs pyrotechniques pour déclencher des retours de flamme . [137]
Forces de l’ordre
La police peut utiliser des drones pour des applications telles que la recherche et le sauvetage et la surveillance du trafic . [138]
Sûreté et sécurité
 Affiche du département américain de l’Agriculture mettant en garde contre les risques de faire voler des drones à proximité d’incendies de forêt
Affiche du département américain de l’Agriculture mettant en garde contre les risques de faire voler des drones à proximité d’incendies de forêt
Des menaces
Nuisance
Les UAV peuvent menacer la sécurité de l’espace aérien de nombreuses façons, y compris des collisions involontaires ou d’autres interférences avec d’autres aéronefs, des attaques délibérées ou en distrayant les pilotes ou les contrôleurs de vol. Le premier incident de collision drone-avion s’est produit à la mi-octobre 2017 à Québec, au Canada. [139] Le premier cas enregistré de collision d’un drone avec une montgolfière s’est produit le 10 août 2018 à Driggs, Idaho , États-Unis ; bien qu’il n’y ait eu aucun dommage important au ballon ni aucune blessure à ses 3 occupants, le pilote du ballon a signalé l’incident au National Transportation Safety Board , déclarant que “j’espère que cet incident contribuera à créer une conversation sur le respect de la nature, de l’espace aérien et règles et règlements ».[140] Les vols non autorisés d’UAV à destination ou à proximité d’aéroports majeurs ont entraîné des fermetures prolongées de vols commerciaux. [141]
Les drones ont causé d’importantes perturbations à l’aéroport de Gatwick en décembre 2018 , nécessitant le déploiement de l’armée britannique. [142] [143]
Aux États-Unis, voler à proximité d’un feu de forêt est passible d’une amende maximale de 25 000 $. Néanmoins, en 2014 et 2015, l’appui aérien de la lutte contre les incendies en Californie a été entravé à plusieurs reprises, notamment au Lake Fire [144] et au North Fire . [145] [146] En réponse, les législateurs californiens ont présenté un projet de loi qui permettrait aux pompiers de désactiver les UAV qui envahissaient l’espace aérien restreint. [147] La FAA a par la suite exigé l’enregistrement de la plupart des UAV.
Vulnérabilités de sécurité
En 2017, des drones étaient utilisés pour déposer de la contrebande dans les prisons. [148]
L’intérêt pour la cybersécurité des drones a été considérablement accru après l’incident de détournement de flux vidéo du drone Predator en 2009, [149] où des militants islamiques ont utilisé un équipement standard bon marché pour diffuser des flux vidéo à partir d’un drone. Un autre risque est la possibilité de détourner ou de bloquer un UAV en vol. Plusieurs chercheurs en sécurité ont rendu publiques certaines vulnérabilités des drones commerciaux, fournissant même dans certains cas un code source complet ou des outils pour reproduire leurs attaques. [150] Lors d’un atelier sur les drones et la vie privée en octobre 2016, des chercheurs de la Federal Trade Commission ont montré qu’ils étaient capables de pirater trois quadricoptères grand public différentset a noté que les fabricants d’UAV peuvent rendre leurs UAV plus sécurisés par les mesures de sécurité de base consistant à crypter le signal Wi-Fi et à ajouter une protection par mot de passe. [151]
Agression
Les drones pourraient être chargés de charges utiles dangereuses et s’écraser sur des cibles vulnérables. Les charges utiles peuvent comprendre des explosifs, des risques chimiques, radiologiques ou biologiques. Les drones avec des charges utiles généralement non létales pourraient éventuellement être piratés et utilisés à des fins malveillantes. Des systèmes anti-UAV sont en cours de développement par les États pour contrer cette menace. Cela s’avère toutefois difficile. Comme l’a déclaré le Dr J. Rogers dans une interview à A&T “Il y a un grand débat en ce moment sur la meilleure façon de contrer ces petits drones, qu’ils soient utilisés par des amateurs causant un peu de nuisance ou de manière plus manière sinistre par un acteur terroriste ». [152]
Contre-mesures
Contre-système aérien sans pilote  Soldats de l’ armée italienne du 17e régiment d’artillerie anti-aérienne “Sforzesca” avec un brouilleur de drone portable à Rome .
Soldats de l’ armée italienne du 17e régiment d’artillerie anti-aérienne “Sforzesca” avec un brouilleur de drone portable à Rome .
L’utilisation malveillante des drones a conduit au développement de technologies de contre-système aérien sans pilote (C-UAS). Le suivi et la détection automatiques des drones à partir de caméras commerciales sont devenus précis grâce au développement d’algorithmes d’apprentissage automatique basés sur l’apprentissage en profondeur. [153] Il est également possible d’identifier automatiquement les UAV à travers différentes caméras avec différents points de vue et spécifications matérielles avec des méthodes de ré-identification. [154] Des solutions commerciales telles que l’Aaronia AARTOS ont été installées sur les principaux aéroports internationaux. [155] [156] Les systèmes de missiles anti-aériens tels que le dôme de fer sont également améliorés avec les technologies C-UAS.
Régulation
Les organismes de réglementation du monde entier développent des solutions de gestion du trafic des systèmes d’aéronefs sans pilote afin de mieux intégrer les UAV dans l’espace aérien. [157]
L’utilisation de véhicules aériens sans pilote (UAV) ou de drones est de plus en plus réglementée par les autorités de l’aviation civile de chaque pays. Les régimes réglementaires peuvent différer considérablement selon la taille et l’utilisation des drones. L’ Organisation de l’aviation civile internationale (OACI) a commencé à explorer l’utilisation de la technologie des drones dès 2005, ce qui a abouti à un rapport de 2011. [158] La France a été parmi les premiers pays à établir un cadre national basé sur ce rapport et des organismes aéronautiques plus importants tels que la FAA et l’ EASA ont rapidement emboîté le pas. [159]En 2021, la FAA a publié une règle exigeant que tous les drones utilisés dans le commerce et tous les drones, quelle que soit leur intention pesant 250 g ou plus, participent à l’ identification à distance , ce qui rend publics les emplacements des drones, les emplacements des contrôleurs et d’autres informations du décollage à l’arrêt ; cette règle a depuis été contestée dans le procès fédéral en cours RaceDayQuads c. FAA . [160] [161]
Contrôles des exportations
L’exportation de drones ou de technologies capables de transporter une charge utile de 500 kg sur au moins 300 km est limitée dans de nombreux pays par le régime de contrôle de la technologie des missiles .
Voir également
- Liste des véhicules aériens sans pilote
- Drone de livraison
- Drone dans une boîte
- Compétition internationale de robotique aérienne
- Liste des films mettant en scène des drones
- Insecte volant micromécanique
- ParcAberporth
- Quadricoptère
- Avion radiocommandé
- Projet Sentinelle Satellite
- Système de contrôle tactique
- Station de contrôle au sol des drones
- Véhicule sous-marin sans pilote
Portails : ![]()
![]() Aviation
Aviation ![]()
![]() Sciences des systèmes
Sciences des systèmes ![]()
![]() Ingénierie
Ingénierie ![]()
![]() Télécommunication
Télécommunication
Références
Citations
- ^ un b Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F., « Navigation coopérative tolérante aux pannes d’essaims de drones en réseau pour la surveillance des incendies de forêt », Science et technologie aérospatiales, 2022.
- ^ Cary, Leslie; Coyne, James. “Systèmes d’aéronefs sans pilote de l’OACI (UAS), Circulaire 328”. Annuaire UAS 2011-2012 – UAS: The Global Perspective (PDF) . Blyenburgh & Co. p. 112–115. Archivé de l’original (PDF) le 4 mars 2016 . Récupéré le 26 février 2022 .
- ^ Hu, J.; En ligneLanzon, A. (2018). “Un drone tri-rotor innovant et un contrôle d’essaim de drone aérien distribué associé” . Robotique et systèmes autonomes . 103 : 162–174. doi : 10.1016/j.robot.2018.02.019 .
- ^ Tice, Brian P. (printemps 1991). “Véhicules aériens sans pilote – Le multiplicateur de force des années 1990” . Journal de la Puissance aérienne . Archivé de l’original le 24 juillet 2009 . Récupéré le 6 juin 2013 . Lorsqu’ils sont utilisés, les UAV doivent généralement effectuer des missions caractérisées par les trois D : ennuyeux, sales et dangereux.
- ^ Hu, J.; Bhowmick, P.; Jang, je. ; Arvin, F.; Lanzon, A., ” Un cadre de confinement de formation de cluster décentralisé pour les systèmes multirobots ” IEEE Transactions on Robotics, 2021.
- ^ un b Alvarado, Ed (3 mai 2021). “237 façons dont les applications de drones révolutionnent les affaires” . Aperçu de l’industrie des drones . Récupéré le 11 mai 2021 .
- ^ Koparan, Cengiz; Koc, A. Bulent; Privette, Charles V.; Sawyer, Calvin B. (mars 2020). “Dispositif d’échantillonnage d’eau adaptatif pour robots aériens” . Drones . 4 (1): 5. doi : 10.3390/drones4010005 .
- ^ Koparan, Cengiz; Koc, Ali Bulent; Privette, Charles V.; Sawyer, Calvin B.; Sharp, Julia L. (mai 2018). « Évaluation d’un prélèvement d’eau autonome assisté par drone » . Eau . 10 (5) : 655. doi : 10.3390/w10050655 .
- ^ Koparan, Cengiz; Koc, Ali Bulent; Privette, Charles V.; Sawyer, Calvin B. (mars 2018). “Mesures de la qualité de l’eau in situ à l’aide d’un système de véhicule aérien sans pilote (UAV)” . Eau . 10 (3): 264. doi : 10.3390/w10030264 .
- ^ Koparan, Cengiz; Koc, Ali Bulent; Privette, Charles V.; Sawyer, Calvin B. (mars 2019). “Mesures autonomes in situ d’indicateurs de qualité de l’eau non contaminante et prélèvement d’échantillons avec un UAV” . Eau . 11 (3) : 604. doi : 10.3390/w11030604 .
- ^ “Des drones faisant passer du porno, de la drogue aux détenus du monde entier” . Nouvelles de Fox . 17 avril 2017.
- ^ Remarque ; le terme « drone » fait référence à l’abeille mâle qui ne sert qu’à féconder la reine des abeilles , d’où l’utilisation du nom en référence à la cible aérienne DH Queen Bee.
- ^ “véhicule aérien sans pilote” . TheFreeDictionary.com . Récupéré le 8 janvier 2015 .
- ^ Guilmartin, John F. “véhicule aérien sans pilote” . Encyclopédie Britannica . Récupéré le 24 mars 2020 .
- ^ “Feuille de route des systèmes d’aéronefs sans pilote” (PDF) . Archivé de l’original (PDF) le 2 octobre 2008.
- ^ “Plan directeur ATM européen 2015 | SESAR” . www.sesarju.eu . Archivé de l’original le 6 février 2016 . Récupéré le 3 février 2016 .
- ^ “Le gouvernement de l’État se prépare pour la cartographie RPAS autonome” . 23 janvier 2017.
- ^ Kucharczyk, Maja; Hugenholtz, Chris (2021). “Télédétection des catastrophes liées aux aléas naturels avec de petits drones : tendances mondiales, biais et opportunités de recherche” . Télédétection de l’environnement . 264 : 112577. Bibcode : 2021RSEnv.264k2577K . doi : 10.1016/j.rse.2021.112577 . Récupéré le 28 novembre 2021 .
- ^ “Drones et Intelligence Artificielle” . Aperçu de l’industrie des drones . 28 août 2018 . Récupéré le 11 avril 2020 .
- ^ “Règlement de l’aviation canadien” . Gouvernement du Canada – Site Web des lois sur la justice . 1 juin 2019 . Récupéré le 16 janvier 2019 .
- ^ “Quelle est la différence entre un drone et un avion ou hélicoptère RC ?” . Drones Etc. Archivé de l’original le 17 novembre 2015 . Récupéré le 12 octobre 2015 .
- ^ Nano, micro, petit : Les différents types de drones en Inde et si la grève de type Jammu peut être évitée , The Print , 29 juin 2021.
- ^ Drones, Percepto (3 janvier 2019). “Les différences entre UAV, UAS et drones autonomes” . Percept .
- ^ L’ Encyclopédie du conflit arabo-israélien: Une histoire politique, sociale et militaire: Une histoire politique, sociale et militaire , ABC-CLIO, 12 mai 2008, par Spencer C. Tucker, Priscilla Mary Roberts, pages 1054–55 ISBN
- ^ The Future of Drone Use: Opportunities and Threats from Ethical and Legal Perspectives , Asser Press – Springer, chapitre d’Alan McKenna, page 355
- ^ Kaplan, Philippe (2013). L’aéronavale pendant la Seconde Guerre mondiale . Plume et épée. p. 19. ISBN 978-1-4738-2997-8.
- ^ Hallion, Richard P. (2003). Prendre son envol : Inventer l’ère aérienne, de l’Antiquité à la Première Guerre mondiale . Presse universitaire d’Oxford. p. 66 . ISBN 978-0-19-028959-1.
- ^ L’aviation navale pendant la Première Guerre mondiale: son impact et son influence , RD Layman, page 56
- ^ Renner, Stephen L. (2016). Ailes brisées: l’armée de l’air hongroise, 1918–45 . Presse universitaire de l’Indiana. p. 2. ISBN 978-0-253-02339-1.
- ^ Murphy, Justin D. (2005). Avions militaires, des origines à 1918 : une histoire illustrée de leur impact . ABC-CLIO. p. 9–10. ISBN 978-1-85109-488-2.
- ^ Haydon, F. Stansbury (2000). Montgolfière militaire au début de la guerre civile . Presse JHU. p. 18-20 . ISBN 978-0-8018-6442-1.
- ^ “Mikesh, Robert C. “Les attentats à la bombe en ballon de la Seconde Guerre mondiale au Japon contre l’Amérique du Nord.” (1973)” (PDF) .
- ^ Sarkar 2006, page 97
- ^ HR Everett, Systèmes sans pilote des guerres mondiales I et II, MIT Press – 2015, pages 91-95
- ^ un bc Taylor , John WR. Livre de poche de Jane sur les véhicules téléguidés .
- ^ Professeur AM Low FLIGHT, 3 octobre 1952 page 436 “Le premier missile guidé”
- ^ Dempsey, Martin E. (9 avril 2010). “Les yeux de l’armée – Feuille de route de l’armée américaine pour les systèmes d’aéronefs sans pilote 2010-2035” (PDF) . Armée américaine . Archivé de l’original (PDF) le 22 septembre 2018 . Récupéré le 6 mars 2011 .
- ^ Dit, Robert Kanyike (21 mai 2012). “Histoire des drones américains” .
- ^ Andersson, Lennart (1994). Avions et aviation soviétiques, 1917-1941 . La série Putnam Aviation. Annapolis, Maryland : Presse de l’Institut naval. p. 249. ISBN 9781557507709. Récupéré le 18 décembre 2021 . Des expériences avec une version drone sans pilote du TB-1 contrôlée par radio depuis d’autres avions ont commencé en 1935 et se sont poursuivies jusqu’en 1939.
- ^ Wagner 1982 , p. xi.
- ^ Wagner 1982 , p. xi, xii.
- ^ Wagner 1982 , p. xii.
- ^ Wagner 1982 , p. 79.
- ^ Wagner 1982 , p. 78, 79.
- ^ Dunstan, Simon (2013). Fortifications israéliennes de la guerre d’octobre 1973 . Édition Osprey. p. 16. ISBN 9781782004318. Récupéré le 25 octobre 2015 . La guerre d’usure a également été marquée par la première utilisation d’UAV, ou de véhicules aériens sans pilote, transportant des caméras de reconnaissance au combat.
- ^ Saxena, VK (2013). L’étonnante croissance et le parcours des capacités des drones et de la défense antimissile balistique : où mène la technologie ? . Vij Books India Pvt Ltd. p. 6. ISBN 9789382573807. Récupéré le 25 octobre 2015 . Pendant la guerre du Yom Kippour, les Israéliens ont utilisé des RPV Teledyne Ryan 124 R avec les drones Scout et Mastiff locaux pour la reconnaissance, la surveillance et comme leurres pour attirer le feu des SAM arabes. Cela a conduit les forces arabes à utiliser des missiles coûteux et rares sur des cibles inappropriées […].
- ^ Blum, Howard (2003). La veille de la destruction : l’histoire inédite de la guerre du Yom Kippour . Harper Collins. ISBN 9780060013998.
- ^ Wagner 1982 , p. 202.
- ^ Wagner 1982 , p. 200, 212.
- ^ un bWagner 1982 , p. 208.
- ^ “Une brève histoire des UAV” . Howstuffworks.com. 22 juillet 2008 . Récupéré le 8 janvier 2015 .
- ^ “La Russie achète un groupe d’UAV israéliens” . Strategypage.com . Récupéré le 8 janvier 2015 .
- ^ Azoulai, Yuval (24 octobre 2011). “Les véhicules de combat sans pilote qui façonnent la guerre future” . Globes . Récupéré le 8 janvier 2015 .
- ^ Levinson, Charles (13 janvier 2010). “Les robots israéliens refont le champ de bataille” . Le Wall StreetJournal . p. A10 . Récupéré le 13 janvier 2010 .
- ^ Gal-Or, Benjamin (1990). Propulsion vectorielle, supermanœuvrabilité et avion robot . Édition Springer. ISBN 978-3-540-97161-0.
- ^ Z. Goraj; A. Frydrychewicz; R. Switkiewicz; B. Hernik; J. Gadomski; T. Goetzendorf-Grabowski; M. Figat; St Suchodolski; W.Chajec. rapport (PDF) . Bulletin de l’Académie polonaise des sciences, Sciences techniques, Volume 52. Numéro 3, 2004 . Récupéré le 9 décembre 2015 .
- ^ Service d’information sur la recherche et le développement communautaires . Application des drones civils et efficacité économique des solutions de configuration potentielles . publié par l’Office des publications de l’Union européenne . Récupéré le 9 décembre 2015 .
- ^ Ackerman, Spencer; Shachtman, Noah (9 janvier 2012). “Presque 1 avion de guerre américain sur 3 est un robot” . FILAIRE . Récupéré le 8 janvier 2015 .
- ^ a b Singer, Peter W. “A Revolution Once More: Unmanned Systems and the Middle East” Archivé le 6 août 2011 à la Wayback Machine , The Brookings Institution , novembre 2009.
- ^ Radsan, AJ; Murphy (2011). “Mesurez deux fois, tirez une fois: un plus grand soin pour le meurtre ciblé par la Cia”. Univ. Ill. Law Rev.:1201–1241 .
- ^ Sayler (2015)
- ^ Franke, Ulrike Esther [“La diffusion mondiale des véhicules aériens sans pilote (UAV) ou ‘drones'”], dans Mike Aaronson (ed) Precision Strike Warfare and International Intervention, Routledge 2015.
- ^ Hambling, David. “Les drones ont peut-être attaqué les humains de manière totalement autonome pour la première fois” . Nouveau scientifique . Récupéré le 30 mai 2021 .
- ^ “Le drone tueur ‘a traqué une cible humaine’ sans qu’on lui dise de le faire” . Poste de New York . 29 mai 2021 . Récupéré le 30 mai 2021 .
- ^ Forestier-Walker, Robin (13 octobre 2020). “Haut-Karabakh : De nouvelles armes pour un vieux danger de sort de conflit” . Al Jazira . Récupéré le 18 décembre 2021 . […] les vidéos du champ de bataille et les capacités militaires connues des deux parties belligérantes suggèrent que l’Azerbaïdjan a l’avantage technologique, en particulier avec ses drones de combat achetés à Israël et à la Turquie.
- ^ “Drone vole à la fois comme biplan et hélicoptère en utilisant une seule hélice” . Engadget .
- ^ “Le créateur d’histoire d’avion modèle Maynard Hill meurt à l’âge de 85 ans” . Poste de Washington .
- ^ Chirarattananon, Pakpong; Ma, Kévin Y ; Wood, J (22 mai 2014), “Contrôle adaptatif d’un robot à aile battante à l’échelle millimétrique” (PDF) , Bioinspiration & Biomimetics , 9 (2): 025004, Bibcode : 2014BiBi….9b5004C , CiteSeerX 10.1.1.650 .3728 , doi : 10.1088/1748-3182/9/2/025004 , PMID 24855052 , archivé de l’original (PDF) le 16 avril 2016
- ^ Sarah Knapton (29 mars 2016). “Des coléoptères géants télécommandés et des insectes ‘biobots’ pourraient remplacer les drones” . Le Télégraphe . Archivé de l’original le 1er avril 2016.
- ^ un bc Floreano , Dario; Wood, Robert J. (27 mai 2015). “Science, technologie et avenir des petits drones autonomes” . Nature . 521 (7553): 460–466. Bibcode : 2015Natur.521..460F . doi : 10.1038/nature14542 . PMID 26017445 . S2CID 4463263 .
- ^ Fasano, Giancarmin; Accardo, Domenico; Tirri, Anna Elena; Moccia, Antonio; De Lellis, Ettore (1er octobre 2015). “Fusion de données radar / électro-optique pour détecter et éviter les UAS non coopératifs” . Sciences et technologies aérospatiales . 46 : 436–450. doi : 10.1016/j.ast.2015.08.010 .
- ^ “Aire de jeu Arduino – WhatIsDegreesOfFreedom6DOF9DOF10DOF11DOF” . terrain de jeu.arduino.cc . Récupéré le 4 février 2016 .
- ^ Carlson, Daniel F.; Rysgaard, Søren (1er janvier 2018). “Adaptation des pilotes automatiques de drones open-source pour les observations d’icebergs en temps réel” . MéthodesX . 5 : 1059–1072. doi : 10.1016/j.mex.2018.09.003 . ISSN 2215-0161 . PMC 6139390 . PMID 30225206 .
- ^ Lesko, J.; Schreiner, M.; Megyesi, D.; Kovacs, Levente (novembre 2019). “Pilote automatique Pixhawk PX-4 dans le contrôle d’un petit avion sans pilote” . 2019 Technologies modernes de sécurité dans les transports (MOSATT) . Kosice, Slovaquie : IEEE : 90–93. doi : 10.1109/MOSATT48908.2019.8944101 . ISBN 978-1-7281-5083-3. S2CID 209695691 .
- ^ Bristeau, Callou, Vissière, Petit (2011). “La technologie de navigation et de contrôle à l’intérieur du micro UAV AR.Drone” (PDF) . Congrès mondial de l’IFAC . {{cite web}}: CS1 maint: multiple names: authors list (link)
- ^ “Le cellulaire permet des déploiements de drones plus sûrs” . Qualcomm . Récupéré le 9 mai 2018 .
- ^ “Identifier les compétences d’équipe critiques habitées-sans pilote pour les opérateurs de systèmes d’aéronefs sans pilote” (PDF) . Institut de recherche de l’armée américaine pour les sciences comportementales et sociales . Septembre 2012.
- ^ “Exigences minimales liées aux performances techniques pour les interfaces radio IMT-2020” . www.itu.int . Récupéré le 8 octobre 2020 .
- ^ “Véhicules automatisés pour la sécurité | NHTSA” . www.nhtsa.gov . Récupéré le 8 octobre 2021 .
- ^ Clough, Bruce (août 2002). “Metrics, Schmetrics! Comment diable déterminez-vous l’autonomie d’un UAV de toute façon?” . Laboratoire de recherche de l’US Air Force .
- ^ Davenport, Christian (23 avril 2015). “Regardez une étape de l’histoire de la Marine : un drone autonome se ravitaille en vol” . Le Washington Post . ISSN 0190-8286 . Récupéré le 3 février 2016 .
- ^ “Enseigner à de minuscules drones comment voler eux-mêmes” . Ars Technica . 27 novembre 2012 . Récupéré le 4 février 2016 .
- ^ “Laboratoire de biomimétique et de manipulation habile – MultiModalRobots” . bdml.stanford.edu . Récupéré le 21 mars 2016 .
- ^ D’Andrea, Raphaël. “L’incroyable puissance athlétique des quadcoptères” . www.ted.com . Récupéré le 4 février 2016 .
- ^ Yanguo, chanson; Huanjin, Wang (1er juin 2009). “Conception du système de contrôle de vol pour un petit avion à rotor basculant sans pilote” . Journal chinois d’aéronautique . 22 (3): 250–256. doi : 10.1016/S1000-9361(08)60095-3 .
- ^ “L’appareil, conçu pour l’atterrissage de type hélicoptère UAV sur une surface verticale plane” . brevets.google.com .
- ^ Inc., Pelonis Technologies. “L’importance d’un refroidissement et d’un flux d’air appropriés pour des performances optimales du drone” . Récupéré le 22 juin 2018 .
- ^ “yeair ! Le quadricoptère du futur. A partir de 1399 €” . Kickstarter . Récupéré le 4 février 2016 .
- ^ “Voler sur l’hydrogène: les chercheurs de Georgia Tech utilisent des piles à combustible pour alimenter un véhicule aérien sans pilote | Georgia Tech Research Institute” . www.gtri.gatech.edu . Récupéré le 4 février 2016 .
- ^ “Le quadricoptère Hycopter à hydrogène pouvait voler pendant 4 heures à la fois” . www.gizmag.com . 20 mai 2015 . Récupéré le 4 février 2016 .
- ^ Gibbs, Yvonne (31 mars 2015). “Fiche d’information NASA Armstrong : Puissance laser à faisceau pour les UAV” . NASA . Récupéré le 22 juin 2018 .
- ^ /;Défi vertical : “Monstres du ciel”/ ;. Archivé le 11 septembre 2013 sur la Wayback Machine
- ^ “Moucheron atomique Général” . Désignation -systems.net . Récupéré le 8 janvier 2015 .
- ^ “Notes sur les drones” . Archivé le 30 juillet 2013 sur la Wayback Machine
- ^ “Modèle transatlantique” . Tam.plannet21.com. Archivé de l’original le 22 mai 2016 . Récupéré le 8 janvier 2015 .
- ^ “Le drone Zephyr de QinetiQ dépasse le record du monde officiel du vol sans pilote de la plus longue durée” . QinetiQ . 10 septembre 2007. Archivé de l’original le 23 avril 2011.
- ^ “Blog de la technologie du nouveau scientifique: avion solaire en route vers un vol éternel – nouveau scientifique” . Newscientist.com. Archivé de l’original le 2 avril 2015 . Récupéré le 8 janvier 2015 .
- ^ “L’avion sans pilote Global Hawk de Northrop Grumman établit un record d’endurance de vol de 33 heures” . Spacewar.com . Récupéré le 27 août 2013 .
- ^ “Le drone Zephyr de QinetiQ vole pendant trois jours et demi pour établir le record du monde non officiel du vol sans pilote de la plus longue durée” . QinetiQ . 24 août 2008. Archivé de l’original le 24 mai 2011.
- ^ “Fichiers QinetiQ pour trois records du monde pour son UAV alimenté par Zephyr Solar” . QinetiQ . 24 août 2010. Archivé de l’original le 24 septembre 2010.
- ^ Boniol (décembre 2014). “Vers une avionique modulaire et certifiée pour UAV” (PDF) . Journal Aerospacelab .
- ^ D. Boskovic et Knoebel (2009). “Une étude comparative de plusieurs stratégies de contrôle adaptatif pour un contrôle de vol résilient” (PDF) . Conférence AIAA sur le guidage, la navigation et le contrôle . Archivé de l’original (PDF) le 4 février 2016.
- ^ Atkins. “Gestion de vol autonome certifiable pour les systèmes d’aéronefs sans pilote” . Université du Michigan .
- ^ Pradhan, Otte, Dubey, Gokhale et Karsai (2013). “Considérations clés pour une infrastructure de déploiement et de configuration résiliente et autonome pour les systèmes cyber-physiques” (PDF) . Département de génie électrique et d’informatique Université Vanderbilt, Nashville . {{cite web}}: CS1 maint: multiple names: authors list (link)
- ^ “Comment les vols de drones autonomes iront au-delà de la ligne de mire” . Nanalyser . 31 décembre 2019.
- ^ McNabb, Miriam (28 février 2020). “Les drones rallument les lumières plus rapidement pour les communautés de Floride” . DRONELIFE .
- ^ Peck, Abe (19 mars 2020). “Le coronavirus stimule la solution de surveillance Drone-in-a-Box de Percepto” . À l’intérieur des systèmes sans pilote .
- ^ Motwani, Sachin (septembre 2020). “Drone tactique pour la livraison de données point à point à l’aide de la communication par lumière laser visible (L-VLC)” . 2020 3e Conférence internationale sur les technologies de communication avancées et les réseaux (CommNet) . Marrakech, Maroc : IEEE : 1–8. doi : 10.1109/CommNet49926.2020.9199639 . ISBN 978-1-7281-8704-4. S2CID 221846385 .
- ^ Vergouw, Bas; Nagel, Huub ; Bondt, Geert ; Custers, Bart (2016), Custers, Bart (éd.), “Drone Technology : Types, Payloads, Applications, Frequency Spectrum Issues and Future Developments” , L’avenir de l’utilisation des drones : opportunités et menaces d’un point de vue éthique et juridique , Technologies de l’information and Law Series, La Haye : TMC Asser Press, pp. 21–45, doi : 10.1007/978-94-6265-132-6_2 , ISBN 978-94-6265-132-6, récupéré le 21 juin 2021
- ^ “véhicule aérien sans pilote | Définition, histoire, types et faits” . Encyclopédie Britannica .
- ^ Horowitz, Michael C. (2020). « Les technologies militaires émergentes sont-elles importantes pour la politique internationale ? » . Revue annuelle de science politique . 23 : 385–400. doi : 10.1146/annurev-polisci-050718-032725 .
- ^ un b “le Renforcement de la Politique turque sur les Exportations de Drone” . Fondation Carnegie pour l’international . Récupéré le 17 mars 2022 .
- ^ un bc « L’ industrie de la défense de la Turquie cible plus de 4 milliards de dollars d’exportations cette année : Officiel » . Nouvelles quotidiennes Hurriyet. 6 mars 2022 . Récupéré le 17 mars 2022 .
- ^ “Les drones de combat en Chine arrivent dans un conflit près de chez vous” . www.intelligent-aerospace.com .
- ^ un bcd ” Le marché des drones militaires augmentera” . 27 octobre 2016.
- ^ un b “L’industrie de la défense turque se développe pendant qu’Akinci UCAV signe le premier accord d’exportation” . TRTWORLD. 23 janvier 2022 . Récupéré le 17 mars 2022 .
- ^ un b Arnett, George (16 mars 2015). “Les chiffres derrière le commerce mondial des drones” . Le Gardien .
- ^ “Les plans du Pentagone pour les réductions des budgets de drones” . DoD Buzz . 2 janvier 2014. Archivé de l’original le 8 janvier 2015 . Récupéré le 17 mars 2022 .
- ^ Bateman, Joshua (1er septembre 2017). « Le fabricant de drones chinois DJI : seul au sommet du ciel sans pilote » . Nouvelles Ledge .
- ^ Friedman, Lisa; McCabe, David (29 janvier 2020). “Le département de l’intérieur fonde ses drones sur les craintes d’espionnage chinois” . Le New York Times . ISSN 0362-4331 . Archivé de l’original le 29 janvier 2020 . Récupéré le 17 novembre 2020 .
- ^ Miller, Maggie (8 octobre 2020). “Le DOJ interdit l’utilisation des fonds de subvention pour certains drones fabriqués à l’étranger” . La Colline . Récupéré le 17 novembre 2020 .
- ^ “PART DE MARCHÉ DE DJI : VOICI EXACTEMENT LA RAPIDITÉ DE CROISSANCE EN QUELQUES ANNÉES” . Emberify Blog . Récupéré le 18 septembre 2018 .
- ^ “UAS par les nombres” . www.faa.gov . Récupéré le 24 mai 2021 .
- ^ “Les drones grand public en chiffres en 2018 et au-delà | News Ledge” . Nouvelles Ledge . 4 avril 2017 . Récupéré le 13 octobre 2018 .
- ^ “Skylark Drones s’apprête à lever son premier tour de financement pour stimuler l’expansion” . 14 septembre 2015 . Récupéré le 28 août 2016 .
- ^ Peterson, Andrea (19 août 2013). « Les États se font concurrence pour être la Silicon Valley des drones » . Le Washington Post . ISSN 0190-8286 . Récupéré le 4 février 2016 .
- ^ “Cours de formation de drone – La liste complète” . Commercialisation de drones . Récupéré le 1er décembre 2016 .
- ^ “IDF achète des drones DJI grand public” . Jane’s 360 . Archivé de l’original le 11 décembre 2017.
- ^ L’armée américaine ne devrait pas utiliser de drones commerciaux – ardoise. Août 2017
- ^ “DJI a gagné les guerres de drones, et maintenant il en paie le prix” . Bloomberg.com . 26 mars 2020 . Récupéré le 18 novembre 2020 .
- ^ “大疆创新与新疆自治区公安厅结为警用无人机战略合作伙伴” . YouUAV.com . 24 décembre 2017.
- ^ Voler haut – pwc. novembre 2018
- ^ “Spectacles de lumière de drone alimentés par Intel” . Intel . Récupéré le 28 juin 2021 .
- ^ “Drone de cinéma AERIGON (UAV) pionnier dans la production cinématographique” .
- ^ “Analyse et prévisions du marché mondial des drones et des robots agricoles, 2018-2028 – ResearchAndMarkets.com” . finance.yahoo.com . Récupéré le 23 mai 2019 .
- ^ “Problèmes agricoles en Afrique aidés par la technologie des drones” . Addicts aux drones . 12 mars 2018 . Récupéré le 23 mai 2019 .
- ^ “Les drones qui lancent des boules enflammées sont testés pour aider à combattre les incendies de forêt” . NPR.org .
- ^ Faust, Daniel R. (2015). Drones de police (1 éd.). New York: The Rosen Publishing Group, Inc.ISBN 9781508145028. Récupéré le 20 février 2020 .
- ^ Dent, Steve (16 octobre 2017). “Un drone percute un avion commercial pour la première fois au Canada” . Engadget. Archivé de l’original le 16 octobre 2017 . Récupéré le 16 octobre 2017 .
- ^ Tellman, Julie (28 septembre 2018). “La toute première collision enregistrée entre un drone et une montgolfière déclenche une conversation sur la sécurité” . Nouvelles de la vallée de Teton . Boise, Idaho, États-Unis : Boise Post-Registre . Récupéré le 3 octobre 2018 .
- ^ “Les drones doivent être encouragés et les gens protégés” . L’Économiste . 26 janvier 2019. ProQuest 2171135630 . Récupéré le 28 juin 2020 .
- ^ Halon, Eytan (21 décembre 2018). “La technologie anti-drone israélienne met fin au chaos de l’aéroport de Gatwick – Nouvelles internationales – Jerusalem Post” . jpost.com . Récupéré le 22 décembre 2018 .
- ^ Matthew Weaver, Damien Gayle, Patrick Greenfield et Frances Perraudin (20 décembre 2018). “L’armée a été appelée pour aider à résoudre la crise des drones à Gatwick” . Le Gardien . Récupéré le 22 décembre 2018 . {{cite news}}: CS1 maint: multiple names: authors list (link)
- ^ “Dans le feu de l’action, les drones gênent les pompiers” . NPR.org .
- ^ Michael Martinez; Paul Vercammen; Ben Brumfield. “Des drones visitent un feu de forêt en Californie, provoquant la colère des pompiers” . CNN.
- ^ Médine, Jennifer (19 juillet 2015). “Poursuivre la vidéo avec des drones, les amateurs mettent en péril les efforts de lutte contre les incendies en Californie” . Archivé de l’original le 21 juillet 2015 – via NYTimes.com.
- ^ Rocha, Veronica (21 juillet 2015). « Attaque contre les drones : la législation pourrait permettre aux pompiers californiens de les abattre » – via LA Times.
- ^ “Les prisons travaillent pour empêcher les drones de trafic de drogue” . NPR.org .
- ^ Mont Mike; Elaine Quijano. “Les insurgés irakiens ont piraté les flux de drones Predator, indique un responsable américain” . CNN.com . Récupéré le 6 décembre 2016 .
- ^ Walters, Sander (29 octobre 2016). “Comment les drones peuvent-ils être piratés ? La liste mise à jour des drones vulnérables et des outils d’attaque” . Moyen . Récupéré le 6 décembre 2016 .
- ^ Glaser, avril (4 janvier 2017). “Le gouvernement américain a montré à quel point il est facile de pirater des drones fabriqués par Parrot, DBPower et Cheerson” . Recoder . Récupéré le 6 janvier 2017 .
- ^ “La technologie anti-drone sera testée sur une base britannique au milieu des craintes terroristes” . 6 mars 2017 . Récupéré le 9 mai 2017 .
- ^ Isaac-Medina, Brian KS; Poyser, Matthieu; Organisciak, Daniel; Willcocks, Chris G.; Breckon, Toby P.; Shum, Hubert PH (2021). Détection et suivi visuels de véhicules aériens sans pilote à l’aide de réseaux de neurones profonds : une référence en matière de performances . pages 1223–1232.
- ^ Organisciak, Daniel; Poyser, Matthieu; Alsehaim, Aishah ; Hu, Shanfeng; Isaac-Medina, Brian KS ; Breckon, Toby P.; Shum, Hubert PH (2022). UAV-ReID : une référence sur la réidentification des véhicules aériens sans pilote dans l’imagerie vidéo . SciTePress. p. 136–146. doi : 10.5220/0010836600003124 . ISBN 978-989-758-555-5.
- ^ “Heathrow choisit C-UAS pour lutter contre la perturbation des drones” . Récupéré le 13 mars 2019 .
- ^ “L’aéroport international de Mascate installera un système de contre-UAS Aaronia de 10 millions de dollars” . Récupéré le 21 janvier 2019 .
- ^ “Qu’est-ce que la gestion du trafic sans pilote ?” . Airbus . Airbus . Récupéré le 28 janvier 2021 .
- ^ Cary, Leslie; Coyne, James. “Systèmes d’aéronefs sans pilote de l’OACI (UAS), Circulaire 328”. Annuaire UAS 2011-2012 – UAS: The Global Perspective (PDF) . Blyenburgh & Co. p. 112–115. Archivé de l’original (PDF) le 4 mars 2016 . Récupéré le 26 février 2022 .
- ^ Boedecker, Hendrik. “Le Règlement Drone 2021 – Quoi de neuf ? Qu’est-ce qui est prévu ?” . Aperçu de l’industrie des drones . Récupéré le 17 mai 2021 .
- ^ “Vue d’ensemble de l’identification à distance UAS” . www.faa.gov . Récupéré le 29 mai 2021 .
- ^ “Bataille juridique de la FAA – Identification à distance difficile” . RaceDayQuads . Récupéré le 29 mai 2021 .
Bibliographie
- Sayler, Kelley (juin 2015). “Un monde de drones proliférés : une introduction à la technologie” (PDF) . Centre pour une nouvelle sécurité américaine . Archivé de l’original (PDF) le 6 mars 2016.
- Wagner, William (1982), Lightning Bugs et autres drones de reconnaissance ; L’histoire réussie des avions espions sans pilote de Ryan , Armed Forces Journal International : Aero Publishers, ISBN 978-0-8168-6654-0
Lectures complémentaires
- Garcia-Bernardo, Sheridan Dodds, F. Johnson (2016). “Modèles quantitatifs dans les guerres de drones” (PDF) . Sciences directes . Archivé de l’original (PDF) le 6 février 2016.{{cite web}}: CS1 maint: multiple names: authors list (link)
- Hill, J., & Rogers, A. (2014). L’essor des drones : de la Grande Guerre à Gaza . Série de colloques sur les arts et les sciences humaines de l’Université de l’île de Vancouver .
- Rogers, A., & Hill, J. (2014). Sans pilote : guerre des drones et sécurité mondiale . Entre les lignes. ISBN 9781771131544
Liens externes
| Wikimedia Commons a des médias liés aux véhicules aériens sans pilote . |
| Wikiquote a des citations liées à: Drones |
- Comment les drones intelligents façonnent l’avenir de la guerre , Rolling Stone Magazine