Voiture autonome
| Apprendre encore plus Cet article peut avoir besoin d’être réorganisé pour se conformer aux directives de mise en page de Wikipédia . ( mars 2022 ) Please help by editing the article to make improvements to the overall structure. (Learn how and when to remove this template message) |
Une voiture autonome , également connue sous le nom de véhicule autonome ( VA ), voiture sans conducteur ou voiture robotique ( robo-car ), [1] [2] [3] est une voiture incorporant l’automatisation des véhicules , c’est-à-dire un véhicule terrestre capable de détecter son environnement et de se déplacer en toute sécurité avec peu ou pas d’intervention humaine . [4] [5]
 Waymo Chrysler Pacifica hybride en cours de test dans la région de la baie de San Francisco
Waymo Chrysler Pacifica hybride en cours de test dans la région de la baie de San Francisco  Voiture de course autonome Roborace exposée au ePrix de New York 2017
Voiture de course autonome Roborace exposée au ePrix de New York 2017
Les voitures autonomes combinent une variété de capteurs pour percevoir leur environnement, tels que des caméras thermographiques , des radars , des lidars , des sonars , des GPS , des odométries et des unités de mesure inertielle . [1] [4] Les systèmes de contrôle avancés interprètent les Informations sensorielles pour identifier les voies de navigation appropriées, ainsi que les obstacles et la signalisation pertinente . [6] [7] [8] [9]
L’autonomie dans les véhicules est souvent classée en six niveaux, [10] selon un système développé par SAE International (SAE J3016, révisé périodiquement). [11] Les niveaux SAE peuvent être grossièrement compris comme Niveau 0 – pas d’automatisation ; Niveau 1 – mains sur/contrôle partagé ; Niveau 2 – mains libres ; Niveau 3 – les yeux fermés ; Niveau 4 – attention, et Niveau 5 – volant en option.
En mars 2022 [update], les véhicules fonctionnant au niveau 3 et au-dessus restent une partie marginale du marché. En décembre 2020, Waymo est devenu le premier fournisseur de services à proposer des trajets en taxi sans chauffeur au grand public, dans une partie de Phoenix, en Arizona . En mars 2021, Honda est devenu le premier constructeur à fournir une voiture de niveau 3 légalement approuvée [12] [13] [14] et Toyota a exploité un service potentiellement de niveau 4 autour du village olympique de Tokyo 2020 . [15] Nuro a été autorisé à démarrer des opérations de livraison commerciale autonomes en Californie en 2021. [16] En décembre 2021, Mercedes-Benzest devenu le deuxième constructeur à recevoir l’approbation légale pour une voiture de niveau 3 conforme aux exigences légales. [17] En février 2022, Cruise est devenu le deuxième fournisseur de services à proposer des trajets en taxi sans chauffeur au grand public, à San Francisco aux États-Unis. [18]
En Chine, deux essais de robotaxis accessibles au public ont été lancés, en 2020 dans le district de Pingshan à Shenzhen par la société chinoise AutoX [19] et en 2021 au parc Shougang à Pékin par Baidu , lieu des Jeux olympiques d’hiver de 2022 . [20]
Histoire
Des expériences ont été menées sur les systèmes de conduite automatisée (ADS) depuis au moins les années 1920; [21] les procès ont commencé dans les années 1950. La première voiture semi-automatisée a été développée en 1977 par le laboratoire japonais de génie mécanique de Tsukuba, qui nécessitait des rues spécialement marquées qui étaient interprétées par deux caméras sur le véhicule et un ordinateur analogique. Le véhicule a atteint des vitesses allant jusqu’à 30 kilomètres par heure (19 mph) avec le soutien d’un rail surélevé. [22] [23]
Une voiture autonome historique est apparue dans les années 1980, avec les projets Navlab [24] et ALV [25] [26] de l’Université Carnegie Mellon financés par la Defense Advanced Research Projects Agency (DARPA) des États-Unis à partir de 1984 et Mercedes-Benz et Le Projet EUREKA Prometheus de l’ Université de la Bundeswehr à Munich en 1987 . conduite sur route de jour comme de nuit en 1987. [28] Une étape importante a été franchie en 1995, avec la NavLab 5 complétant le premier lecteur autonome d’un océan à l’autre des États-Unis. Sur les 2 849 mi (4 585 km) entre Pittsburgh, Pennsylvanie et San Diego, Californie , 2 797 mi (4 501 km) étaient autonomes (98,2 %), complétés avec une vitesse moyenne de 63,8 mph (102,7 km/h). [29] [30] [31] [32] Des années 1960 au deuxième DARPA Grand Challenge en 2005, la recherche sur les véhicules automatisés aux États-Unis a été principalement financée par la DARPA, l’armée américaine et la marine américaine, ce qui a permis des avancées progressives dans vitesses, compétence de conduite dans des conditions plus complexes, commandes et systèmes de capteurs. [33] Des entreprises et des organismes de recherche ont développé des prototypes.[27] [34] [35] [36] [37] [38] [39] [40] [41]
Les États-Unis ont alloué 650 millions de dollars américains en 1991 à la recherche sur le National Automated Highway System, qui a démontré la conduite automatisée grâce à une combinaison d’automatisation intégrée à l’autoroute avec une technologie automatisée dans les véhicules et un réseau coopératif entre les véhicules et avec l’infrastructure routière. Le programme s’est terminé par une démonstration réussie en 1997, mais sans orientation claire ni financement pour mettre en œuvre le système à plus grande échelle. [42] En partie financé par le National Automated Highway System et la DARPA, le Navlab de l’Université Carnegie Mellon a parcouru 4 584 kilomètres (2 848 mi) à travers l’Amérique en 1995, 4 501 kilomètres (2 797 mi) ou 98% de celui-ci de manière autonome. [43]La réalisation record de Navlab est restée inégalée pendant deux décennies jusqu’en 2015, lorsque Delphi l’a améliorée en pilotant une Audi, augmentée de la technologie Delphi, sur 5472 kilomètres (3400 mi) à travers 15 états tout en restant en mode autonome 99% du temps. [44] En 2015, les États américains du Nevada , de Floride , de Californie , de Virginie et du Michigan , ainsi que Washington, DC , ont autorisé les essais de voitures automatisées sur la voie publique. [45]
De 2016 à 2018, la Commission européenne a financé le développement d’une stratégie d’innovation pour la conduite connectée et automatisée par le biais des actions de coordination CARTRE et SCOUT. [46] En outre, la feuille de route du programme de recherche et d’innovation dans le domaine des transports stratégiques (STRIA) pour les transports connectés et automatisés a été publiée en 2019. [47]
En novembre 2017, Waymo a annoncé qu’elle avait commencé à tester des voitures sans conducteur sans conducteur de sécurité au poste de conduite; [48] cependant, il y avait toujours un employé dans la voiture. [49] Un rapport d’octobre 2017 de la Brookings Institution a révélé que les 80 milliards de dollars avaient été investis dans toutes les facettes de la technologie de conduite autonome jusque-là, mais qu’il était “raisonnable de présumer que l’investissement mondial total dans la technologie des véhicules autonomes est beaucoup plus que cela.” [50]
En octobre 2018, Waymo a annoncé que ses véhicules d’essai avaient parcouru en mode automatisé plus de 10 000 000 miles (16 000 000 km), augmentant d’environ 1 000 000 miles (1 600 000 kilomètres) par mois. [51] En décembre 2018, Waymo a été le premier à commercialiser un service de taxi entièrement autonome aux États-Unis, à Phoenix, en Arizona. [52] En octobre 2020, Waymo a lancé un service d’appel géo-clôturé sans conducteur à Phoenix. [53] [54] Les voitures sont surveillées en temps réel par une équipe d’ingénieurs à distance, et il y a des cas où les ingénieurs à distance doivent intervenir. [55] [54]
En mars 2019, avant la série de courses autonomes Roborace , Robocar a établi le record du monde Guinness de la voiture autonome la plus rapide au monde. En repoussant les limites des véhicules autonomes, Robocar a atteint 282,42 km/h (175,49 mph) – une moyenne confirmée par la UK Timing Association à Elvington dans le Yorkshire, au Royaume-Uni. [56]
En 2020, un président du National Transportation Safety Board a déclaré qu’aucune voiture autonome ( niveau SAE 3+ ) n’était disponible pour les consommateurs aux États-Unis en 2020 :
Il n’existe actuellement aucun véhicule autonome disponible pour les consommateurs américains. Période. Chaque véhicule vendu aux consommateurs américains exige toujours que le conducteur soit activement engagé dans la tâche de conduite, même lorsque les Systèmes avancés d’aide à la conduite sont activés. Si vous vendez une voiture avec un système avancé d’aide à la conduite, vous ne vendez pas une voiture autonome. Si vous conduisez une voiture dotée d’un système avancé d’aide à la conduite, vous ne possédez pas de voiture autonome. [57]
Le 5 mars 2021, Honda a commencé à louer au Japon une édition limitée de 100 berlines Legend Hybrid EX équipées du nouvel équipement de conduite automatisée de niveau 3 qui avait reçu la certification de sécurité du gouvernement japonais pour leur technologie de conduite autonome “Traffic Jam Pilot”. et permettre légalement aux conducteurs de quitter la route des yeux. [12] [13] [58] [14]
Définitions
Il y a une certaine incohérence dans la terminologie utilisée dans l’industrie de la voiture autonome. Divers organismes ont proposé de définir un vocabulaire précis et cohérent.
En 2014, une telle confusion a été documentée dans SAE J3016 qui stipule que “certains usages vernaculaires associent l’autonomie spécifiquement à l’automatisation complète de la conduite (niveau 5), tandis que d’autres usages l’appliquent à tous les niveaux d’automatisation de la conduite, et certaines législations d’État l’ont défini comme correspondent approximativement à tout ADS [système de conduite automatisée] au niveau 3 ou au-dessus (ou à tout véhicule équipé d’un tel ADS).”
Terminologie et considérations de sécurité
Les véhicules modernes offrent des fonctionnalités telles que le maintien de la voiture dans sa voie, les contrôles de vitesse ou le freinage d’urgence. Ces fonctionnalités à elles seules sont simplement considérées comme des technologies d’assistance à la conduite, car elles nécessitent toujours un contrôle du conducteur humain tandis que les véhicules entièrement automatisés se conduisent sans intervention humaine du conducteur.
Selon Fortune, les noms de technologie de certains véhicules plus récents, tels que AutonoDrive, PilotAssist, Full-Self Driving ou DrivePilot, peuvent confondre le conducteur, qui peut croire qu’aucune intervention du conducteur n’est attendue alors qu’en fait le conducteur doit rester impliqué dans la tâche de conduite. . [59] Selon la BBC , la confusion entre ces concepts entraîne des décès. [60]
Pour cette raison, certaines organisations telles que l’ AAA essaient de fournir des conventions de dénomination standardisées pour des fonctionnalités telles que ALKS qui visent à avoir la capacité de gérer la tâche de conduite, mais qui ne sont pas encore approuvées pour être des véhicules automatisés dans aucun pays. L’ Association des assureurs britanniques considère que l’utilisation du mot autonome dans le marketing des voitures modernes est dangereuse, car les publicités sur les voitures font penser aux automobilistes que “autonome” et “pilote automatique” signifie qu’un véhicule peut se conduire tout seul alors qu’il compte toujours sur le conducteur pour assurer la sécurité. La technologie capable de conduire une voiture est encore en phase bêta.
Certains constructeurs automobiles suggèrent ou prétendent que les véhicules sont autonomes lorsqu’ils ne sont pas en mesure de gérer certaines situations de conduite. Bien qu’appelée Full Self-Driving, Tesla a déclaré que son offre ne devait pas être considérée comme un système de conduite entièrement autonome. [61] Cela fait que les conducteurs risquent de devenir excessivement confiants, d’adopter un comportement de conduite distrait , entraînant des accidents. Alors qu’en Grande-Bretagne, une voiture entièrement autonome n’est qu’une voiture inscrite sur une liste spécifique. [62] Il a également été proposé d’adopter les connaissances en matière de sécurité de l’automatisation de l’aviation dans les discussions sur la mise en œuvre sûre des véhicules autonomes, en raison de l’expérience acquise au fil des décennies par le secteur de l’aviation sur des sujets de sécurité. [63]
Selon le SMMT, “Il existe deux états clairs – un véhicule est soit assisté par un conducteur assisté par la technologie, soit automatisé lorsque la technologie remplace efficacement et en toute sécurité le conducteur.”. [64]
Autonome vs automatisé
Autonome signifie autonome. [65] De nombreux projets historiques liés à l’automatisation des véhicules ont été automatisés (rendus automatiques) sous réserve d’une forte dépendance à des aides artificielles dans leur environnement, telles que des bandes magnétiques. Le contrôle autonome implique des performances satisfaisantes dans des conditions d’incertitudes importantes de l’environnement et la capacité de compenser les défaillances du système sans intervention extérieure. [65]
Une approche consiste à mettre en œuvre des Réseaux de communication à la fois dans le voisinage immédiat (pour éviter les collisions ) et plus loin (pour la gestion de la congestion). De telles influences extérieures dans le processus de décision réduisent l’autonomie d’un véhicule individuel, tout en ne nécessitant pas d’intervention humaine.
Dès 2017 [update], la plupart des projets commerciaux portaient sur des véhicules automatisés qui ne communiquaient pas avec d’autres véhicules ou avec un régime de gestion enveloppant. EuroNCAP définit autonome dans ” Autonomous Emergency Braking ” comme : ” le système agit indépendamment du conducteur pour éviter ou atténuer l’accident “, ce qui implique que le système autonome n’est pas le conducteur. [66]
En Europe, les mots automatisé et autonome peuvent être utilisés ensemble. Par exemple, le règlement (UE) 2019/2144 du Parlement européen et du Conseil du 27 novembre 2019 relatif aux exigences de réception par type des véhicules à moteur (…) définit le “véhicule automatisé” et le “véhicule entièrement automatisé” sur la base de leur autonomie. capacité : [67]
- « véhicule automatisé » désigne un véhicule à moteur conçu et construit pour se déplacer de manière autonome pendant certaines périodes de temps sans la surveillance continue du conducteur, mais pour lequel l’intervention du conducteur est toujours attendue ou requise ; [67]
- « véhicule entièrement automatisé » désigne un véhicule à moteur qui a été conçu et construit pour se déplacer de manière autonome sans la supervision d’un conducteur ; [67]
En anglais britannique, le mot automatisé seul peut avoir plusieurs significations, comme dans la phrase : “Thatcham a également constaté que les systèmes de maintien de voie automatisés ne pouvaient respecter que deux des douze principes requis pour garantir la sécurité, poursuivant en disant qu’ils ne le pouvaient pas, par conséquent , être classé comme « conduite automatisée », au lieu de cela, il prétend que la technologie devrait être classée comme « conduite assistée » : [68] La première occurrence du mot « automatisé » fait référence à un système automatisé de l’UNECE, tandis que la seconde occurrence fait référence à la définition juridique britannique d’un véhicule automatisé. La loi britannique interprète le sens de « véhicule automatisé » en fonction de l’article d’interprétation relatif à un véhicule « conduisant lui-même » et à un véhicule assuré .
Autonome versus coopératif
Pour permettre à une voiture de rouler sans aucun conducteur embarqué dans le véhicule, certaines entreprises utilisent un conducteur à distance. [70]
Selon SAE J3016 ,
Certains systèmes d’automatisation de la conduite peuvent en effet être autonomes s’ils remplissent toutes leurs fonctions de manière indépendante et autonome, mais s’ils dépendent de la communication et/ou de la coopération avec des entités extérieures, ils doivent être considérés comme coopératifs plutôt qu’autonomes.
Classements
Voiture autonome
PC Magazine définit une voiture autonome comme “une voiture contrôlée par ordinateur qui se conduit toute seule”. [71] L’ Union of Concerned Scientists déclare que les voitures autonomes sont “des voitures ou des camions dans lesquels les conducteurs humains ne sont jamais tenus de prendre le contrôle pour faire fonctionner le véhicule en toute sécurité. Également appelées voitures autonomes ou “sans conducteur”, elles combinent des capteurs et un logiciel pour contrôler, naviguer et conduire le véhicule.” [72]
La loi britannique de 2018 sur les véhicules automatisés et électriques définit un véhicule comme “conduisant lui-même” si le véhicule “fonctionne dans un mode dans lequel il n’est pas contrôlé et n’a pas besoin d’être surveillé par un individu”. [73]
Classement SAE
 Le système Tesla Autopilot est classé comme système SAE niveau 2 [74] [75]
Le système Tesla Autopilot est classé comme système SAE niveau 2 [74] [75]
Un système de classification à six niveaux – allant des systèmes entièrement manuels aux systèmes entièrement automatisés – a été publié en 2014 par l’organisme de normalisation SAE International sous le nom J3016, Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems ; les détails sont révisés périodiquement. [11] Cette classification est basée sur la quantité d’intervention du conducteur et d’attention requise, plutôt que sur les capacités du véhicule, bien que celles-ci soient vaguement liées. Aux États-Unis, en 2013, la National Highway Traffic Safety Administration (NHTSA) avait publié son système de classification formel original. Après que SAE a mis à jour sa classification en 2016, appelée J3016_201609, [76]La NHTSA a adopté la norme SAE [77] et la classification SAE est devenue largement acceptée. [78]
Niveaux d’automatisation de la conduite
Dans les définitions de niveau d’automatisation de SAE, “mode de conduite” signifie “un type de scénario de conduite avec des exigences de tâche de conduite dynamiques caractéristiques (par exemple, fusion d’autoroutes, croisière à grande vitesse, embouteillage à basse vitesse, opérations sur campus fermé, etc.)” [1] [79]
- Niveau 0 : L’automatisme émet des avertissements et peut intervenir momentanément mais n’a pas de contrôle soutenu du véhicule.
- Niveau 1 (“hands on”) : Le conducteur et le système automatisé partagent le contrôle du véhicule. Des exemples sont des systèmes où le conducteur contrôle la direction et le système automatisé contrôle la puissance du moteur pour maintenir une vitesse définie ( régulateur de vitesse ) ou la puissance du moteur et des freins pour maintenir et faire varier la vitesse ( régulateur de vitesse adaptatif ou ACC); et Aide au stationnement , où la direction est automatisée tandis que la vitesse est sous contrôle manuel. Le conducteur doit être prêt à reprendre le contrôle total à tout moment. Lane Keeping Assistance (LKA) Type II est un autre exemple de conduite autonome de niveau 1. Selon _Revue de pilotage automatique . [80]
- Niveau 2 (“mains libres”) : le système automatisé prend le contrôle total du véhicule : accélération, freinage et direction. Le conducteur doit surveiller la conduite et être prêt à intervenir immédiatement à tout moment si le système automatisé ne répond pas correctement. La sténographie “mains libres” n’est pas destinée à être prise à la lettre – le contact entre la main et le volant est souvent obligatoire pendant la conduite SAE 2, pour confirmer que le conducteur est prêt à intervenir. Les yeux du conducteur peuvent être surveillés par des caméras pour confirmer que le conducteur reste attentif à la circulation. La conduite sans intervention littérale est considérée comme un niveau 2.5, bien qu’il n’y ait pas officiellement de demi-niveaux. Un exemple courant est le régulateur de vitesse adaptatif qui utilise également la technologie d’assistance au maintien de voie afin que le conducteur surveille simplement le véhicule, comme “Super-Cruise” dans la Cadillac CT6 de General Motors ou le F-150 BlueCruise de Ford. [81]
- Niveau 3 (“yeux fermés”) : le conducteur peut détourner son attention en toute sécurité des tâches de conduite, par exemple le conducteur peut envoyer un SMS ou regarder un film. Le véhicule gère les situations qui nécessitent une réponse immédiate, comme le freinage d’urgence. Le conducteur doit toujours être prêt à intervenir dans un délai limité, spécifié par le constructeur, lorsque le véhicule le lui demande. Vous pouvez considérer le système automatisé comme un copilote qui vous avertira de manière ordonnée lorsque ce sera à votre tour de conduire. Un exemple serait un chauffeur d’embouteillage, [82] un autre exemple serait une voiture satisfaisant aux réglementations internationales du système de maintien de voie automatisé (ALKS). [83]
- Niveau 4 (« attention ») : comme le niveau 3, mais aucune attention du conducteur n’est jamais requise pour la sécurité, par exemple le conducteur peut aller dormir en toute sécurité ou quitter le siège du conducteur. Cependant, la conduite autonome n’est prise en charge que dans des zones spatiales limitées ( géo -clôturées ) ou dans des circonstances particulières. En dehors de ces zones ou circonstances, le véhicule doit pouvoir interrompre le trajet en toute sécurité, par exemple ralentir et garer la voiture, si le conducteur ne reprend pas le contrôle. Un exemple serait un taxi robotisé ou un service de livraison robotisé qui couvre des emplacements sélectionnés dans une zone, à une heure et des quantités spécifiques.
- Niveau 5 (“volant en option”) : aucune intervention humaine n’est requise. Un exemple serait un véhicule robotisé qui fonctionne sur toutes sortes de surfaces, partout dans le monde, toute l’année, dans toutes les conditions météorologiques.
Dans la définition formelle SAE ci-dessous, une transition importante est du niveau SAE 2 au niveau SAE 3 dans lequel le conducteur humain n’est plus censé surveiller l’environnement en permanence. À SAE 3, le conducteur humain a toujours la responsabilité d’intervenir lorsque le système automatisé lui demande de le faire. À SAE 4, le conducteur humain est toujours relevé de cette responsabilité et à SAE 5, le système automatisé n’aura jamais besoin de demander une intervention.
| Niveau SAE | Nom | Définition narrative | Exécution de la direction et de l’accélération/ décélération |
Surveillance de l’environnement de conduite | Performance de repli de la tâche de conduite dynamique | Capacité du système (modes de conduite) | |
|---|---|---|---|---|---|---|---|
| Le conducteur humain surveille l’environnement de conduite | |||||||
| 0 | Aucune automatisation | L’exécution à temps plein par le conducteur humain de tous les aspects de la tâche de conduite dynamique, même “renforcée par des systèmes d’alerte ou d’intervention” | Conducteur humain | Conducteur humain | Conducteur humain | n / A | |
| 1 | Aide à la conduite | L’exécution spécifique au mode de conduite par un système d’assistance à la conduite de la direction ou de l’accélération/décélération | en utilisant des informations sur l’environnement de conduite et en s’attendant à ce que le conducteur humain exécute tous les aspects restants de la tâche de conduite dynamique | Pilote humain et système | Certains modes de conduite | ||
| 2 | Automatisation partielle | L’exécution spécifique au mode de conduite par un ou plusieurs systèmes d’assistance à la conduite de la direction et de l’accélération/décélération | Système | ||||
| Le système de conduite automatisé surveille l’environnement de conduite | |||||||
| 3 | Automatisation conditionnelle | La performance spécifique au mode de conduite par un système de conduite automatisé de tous les aspects de la tâche de conduite dynamique | dans l’attente que le conducteur humain réponde de manière appropriée à une demande d’intervention | Système | Système | Conducteur humain | Certains modes de conduite |
| 4 | Haute automatisation | même si un conducteur humain ne répond pas de manière appropriée à une demande d’intervention , la voiture peut s’arrêter en toute sécurité grâce au système de guidage | Système | De nombreux modes de conduite | |||
| 5 | Automatisation complète | dans toutes les conditions routières et environnementales pouvant être gérées par un conducteur humain | Tous les modes de conduite |
Critique de SAE
Les niveaux d’automatisation SAE ont été critiqués pour leur orientation technologique. Il a été avancé que la structure des niveaux suggère que l’automatisation augmente de manière linéaire et qu’une plus grande automatisation est préférable, ce qui n’est peut-être pas toujours le cas. [84] Les niveaux SAE ne tiennent pas non plus compte des changements qui peuvent être nécessaires à l’infrastructure [85] et au comportement des usagers de la route. [86] [87]
Technologie
| Apprendre encore plus Cette section est écrite comme une réflexion personnelle, un essai personnel ou un essai argumentatif qui énonce les sentiments personnels d’un éditeur de Wikipédia ou présente un argument original sur un sujet. ( avril 2022 ) Please help improve it by rewriting it in an encyclopedic style. (Learn how and when to remove this template message) |
Perspectives générales
Pour faire face à l’éventail des discussions technologiques concernant la voiture autonome, il existe peu de propositions pour sa classification. Parmi eux, il y a une proposition d’avoir une classification pour avoir les catégories suivantes ; navigation automobile, planification de trajectoire, perception de l’environnement et contrôle de la voiture. [88]
Dans les années 2020, ces technologies ont été reconnues comme étant beaucoup plus compliquées et impliquées que nous ne le pensions. [89] [90]
Et on dit qu’il a les caractéristiques suivantes; reprogrammable, modularité et homogénéisation.
Navigation hybride
La navigation hybride est l’utilisation simultanée de plusieurs systèmes de navigation pour la détermination des données de localisation, nécessaires à la navigation .
Les voitures autonomes
modernes utilisent généralement des algorithmes bayésiens de localisation et de cartographie simultanées (SLAM), [91] qui fusionnent les données de plusieurs capteurs et une carte hors ligne dans les estimations de localisation actuelles et les mises à jour de carte. Waymo a développé une variante de SLAM avec détection et suivi d’autres objets en mouvement (DATMO), qui gère également les obstacles tels que les voitures et les piétons. Des systèmes plus simples peuvent utiliser des technologies de système de localisation en temps réel en bordure de route (RTLS) pour faciliter la localisation. Les capteurs typiques incluent le lidar (détection et télémétrie de la lumière), la Vision stéréo , le GPS et l’ IMU . [92] [93]
En mai 2018, des chercheurs du Massachusetts Institute of Technology ont annoncé qu’ils avaient construit une voiture automatisée capable de naviguer sur des routes non cartographiées. [94] Des chercheurs de leur Laboratoire d’informatique et d’intelligence artificielle (CSAIL) ont développé un nouveau système, appelé MapLite, qui permet aux voitures autonomes de rouler sur des routes qu’elles n’ont jamais empruntées auparavant, sans utiliser de cartes 3D. Le système combine la position GPS du véhicule, une “carte topologique clairsemée” telle que OpenStreetMap , (c’est-à-dire n’ayant que des caractéristiques 2D des routes) et une série de capteurs qui observent les conditions de la route. [95]
Fusion de capteurs
Les systèmes de contrôle des voitures automatisées peuvent utiliser la fusion de capteurs , qui est une approche qui intègre des informations provenant de divers capteurs sur la voiture pour produire une vue plus cohérente, précise et utile de l’environnement. [96]
Planification de chemin La planification de
chemin est un problème de calcul pour trouver une séquence de configurations valides qui déplace l’objet de la source à la destination. La trajectoire à grande échelle du véhicule peut être déterminée à l’aide d’un diagramme de Voronoi , d’une cartographie de grille d’occupation ou d’un algorithme de couloirs de conduite. [97] Cependant, ces approches traditionnelles ne sont pas suffisantes pour un véhicule qui interagit avec d’autres objets en mouvement, et plusieurs approches avancées sont en cours de développement. [90]
Conduit par cable
La technologie d’entraînement par fil dans l’industrie automobile est l’utilisation de systèmes électriques ou électromécaniques pour exécuter des fonctions de véhicule traditionnellement réalisées par des liaisons mécaniques.
Communication véhiculaire
Les communications véhiculaires sont un domaine en pleine expansion des communications entre les véhicules et comprennent les infrastructures de communication en bordure de route. Les systèmes de communication véhiculaire utilisent des véhicules et des unités routières comme nœuds de communication dans un réseau pair à pair, se fournissant mutuellement des informations. Cette connectivité permet aux véhicules autonomes d’interagir avec le trafic non autonome et les piétons pour accroître la sécurité. [98] [99] Et les véhicules autonomes devront se connecter au cloud pour mettre à jour leurs logiciels et leurs cartes, et fournir des informations en retour pour améliorer les cartes et les logiciels utilisés par leur fabricant. [90]
Reprogrammable
Les véhicules autonomes ont des systèmes logiciels qui pilotent le véhicule, ce qui signifie que les mises à jour par reprogrammation ou modification du logiciel peuvent améliorer les avantages du propriétaire (par exemple, mise à jour pour mieux distinguer les personnes aveugles des non-aveugles afin que le véhicule redouble de prudence à l’approche une personne aveugle). Une caractéristique de cette partie reprogrammable des véhicules autonomes est que les mises à jour ne doivent pas seulement provenir du fournisseur, car grâce à l’apprentissage automatique, les véhicules autonomes intelligents peuvent générer certaines mises à jour et les installer en conséquence (par exemple, de nouvelles cartes de navigation ou de nouveaux systèmes informatiques de carrefour). Ces caractéristiques reprogrammables du numérique et la possibilité de smart machine learning donnent aux constructeurs de véhicules autonomes l’opportunité de se différencier sur le logiciel.
Modularité
Les véhicules autonomes sont plus modulaires puisqu’ils sont constitués de plusieurs modules qui seront expliqués ci-après à travers une architecture modulaire en couches. L’architecture modulaire en couches étend l’architecture des véhicules purement physiques en incorporant quatre couches faiblement couplées d’appareils, de réseaux, de services et de contenus dans les véhicules autonomes. Ces couches faiblement couplées peuvent interagir via certaines interfaces standardisées.
- La première couche de cette architecture est constituée de la couche périphérique. Cette couche se compose des deux parties suivantes : capacité logique et machinerie physique. La machinerie physique fait référence au véhicule lui-même (par exemple, le châssis et la carrosserie). Lorsqu’il s’agit de technologies numériques, la machinerie physique s’accompagne d’une couche de capacités logiques sous la forme de systèmes d’exploitation qui aident à guider les véhicules eux-mêmes et à les rendre autonomes. La capacité logique permet de contrôler le véhicule et de le connecter aux autres couches.;
- Au-dessus de la couche périphérique vient la couche réseau. Cette couche se compose également de deux parties différentes : le transport physique et la transmission logique. La couche de transport physique fait référence aux radars, capteurs et câbles des véhicules autonomes qui permettent la transmission d’informations numériques. À côté de cela, la couche réseau des véhicules autonomes dispose également d’une transmission logique qui contient des protocoles de communication et une norme de réseau pour communiquer les informations numériques avec d’autres réseaux et plates-formes ou entre les couches. Cela augmente l’accessibilité des véhicules autonomes et permet la puissance de calcul d’un réseau ou d’une plate-forme.;
- La couche de service contient les applications et leurs fonctionnalités qui servent le véhicule autonome (et ses propriétaires) lorsqu’ils extraient, créent, stockent et consomment du contenu en ce qui concerne leur propre historique de conduite, les embouteillages, les routes ou les capacités de stationnement par exemple ; et
- La dernière couche du modèle est la couche de contenu. Cette couche contient les sons, les images et les vidéos. Les véhicules autonomes stockent, extraient et utilisent pour agir et améliorer leur conduite et leur compréhension de l’environnement. La couche de contenu fournit également des métadonnées et des informations de répertoire sur l’origine du contenu, la propriété, le droit d’auteur, les méthodes d’encodage, les balises de contenu, les horodatages géographiques, etc. (Yoo et al., 2010).
Homogénéisation
Pour que les véhicules autonomes perçoivent leur environnement, ils doivent utiliser différentes techniques, chacune accompagnée de ses propres informations numériques (par exemple, radar, GPS, capteurs de mouvement et vision par ordinateur). L’homogénéisation nécessite que les informations numériques issues de ces différentes sources soient transmises et stockées sous la même forme. Cela signifie que leurs différences sont découplées et que les informations numériques peuvent être transmises, stockées et calculées de manière à ce que les véhicules et leur système d’exploitation puissent mieux les comprendre et agir en conséquence.
Dans le domaine de la normalisation internationale, l’ ISO /TC 204 est en charge des systèmes d’information, de communication et de contrôle dans le domaine des transports terrestres urbains et ruraux dans le domaine des systèmes de transport intelligents (ITS). [100] Des normes internationales ont été activement élaborées dans les domaines des fonctions AD/ADAS, de la connectivité, de l’interaction humaine, des systèmes embarqués, de la gestion/ingénierie, de la cartographie dynamique et du positionnement, de la confidentialité et de la sécurité. [101]
Défis
Obstacles
Les avantages potentiels d’une automatisation accrue des véhicules décrits peuvent être limités par des défis prévisibles tels que des litiges sur la responsabilité, [102] [103] le temps nécessaire pour transformer le parc existant de véhicules non automatisés en véhicules automatisés, [104] et donc une longue période de partage des routes par les humains et les véhicules autonomes, la résistance des individus à perdre le contrôle de leur voiture, [105] les préoccupations concernant la sécurité, [106] et la mise en œuvre d’un cadre juridique et de réglementations gouvernementales mondiales cohérentes pour les voitures autonomes. [107]
D’autres obstacles pourraient inclure la déqualification et des niveaux inférieurs d’expérience du conducteur pour faire face à des situations et des anomalies potentiellement dangereuses, [108] des problèmes éthiques où le logiciel d’un véhicule automatisé est obligé, lors d’un accident inévitable, de choisir entre plusieurs modes d’action nuisibles (“le chariot ‘ ), [109] [110] les inquiétudes concernant le fait de mettre au chômage un grand nombre de personnes actuellement employées comme chauffeurs, le potentiel d’une surveillance de masse plus intrusive de la localisation, de l’association et des déplacements en raison de l’accès de la police et des agences de renseignement aux grands ensembles de données générés par des capteurs et une IA à reconnaissance de formes, et éventuellement une compréhension insuffisante des sons verbaux, des gestes et des signaux non verbaux par la police, les autres conducteurs ou les piétons.[111]
 Des véhicules de livraison autonomes bloqués au même endroit en tentant de s’éviter les uns les autres.
Des véhicules de livraison autonomes bloqués au même endroit en tentant de s’éviter les uns les autres.
Les obstacles technologiques possibles pour les voitures automatisées sont : [ nécessite une mise à jour ]
- L’intelligence artificielle n’est toujours pas en mesure de fonctionner correctement dans les environnements chaotiques des centres-villes. [112]
- L’ordinateur d’une voiture pourrait potentiellement être compromis, tout comme un système de communication entre les voitures. [113] [114] [115] [116] [117]
- Sensibilité des systèmes de détection et de navigation de la voiture à différents types de conditions météorologiques (comme la neige) ou interférences délibérées, y compris le brouillage et l’usurpation d’identité. [111]
- L’évitement des grands animaux nécessite une reconnaissance et un suivi, et Volvo a constaté que les logiciels adaptés au Caribou , au cerf et au wapiti étaient inefficaces avec les kangourous . [118]
- Les voitures autonomes peuvent nécessiter des cartes haute définition pour fonctionner correctement. Là où ces cartes pourraient être obsolètes, elles devraient pouvoir se rabattre sur des comportements raisonnables.
- Concurrence pour le spectre radio souhaité pour la communication de la voiture. [119]
- La programmabilité sur le terrain des systèmes nécessitera une évaluation minutieuse du développement des produits et de la chaîne d’approvisionnement des composants. [117]
- L’infrastructure routière actuelle peut nécessiter des modifications pour que les voitures automatisées fonctionnent de manière optimale. [120]
- Défi de validation de la conduite automatisée et besoin de nouvelles approches basées sur la simulation comprenant des jumeaux numériques et une simulation de trafic basée sur des agents. [121]
Problèmes
Réglementation
Dans les années 2010, il s’était inquiété de l’incertitude selon laquelle une future réglementation potentielle pourrait retarder le déploiement de voitures automatisées sur la route. [122] Cependant, comme indiqué dans le document UNECE WP.29 GRVA , la réglementation internationale pour le niveau 3 a été établie en douceur en 2020 et l’incertitude a été résolue. À partir de 2022 [update], dans la pratique, il est en fait très difficile d’être approuvé au niveau 3.
Marketing trompeur
Comme le “Full Self-Driving (FSD)” de Tesla correspond en fait au niveau 2, [123] les sénateurs ont demandé une enquête à la Federal Trade Commission (FTC) sur leurs allégations marketing en août 2021. [124] Et en décembre 2021 en Japon, Mercedes-Benz Japan Co., Ltd. a été puni par l’ Agence de la consommation pour les descriptions dans leurs documents qui sont différentes de la réalité. [125]
C’est en juillet 2016, à la suite d’un accident mortel d’une voiture Tesla fonctionnant en mode “Pilote automatique”, que Mercedes-Benz a également été critiquée en erreur sur leur publicité de modèles de Classe E qui étaient disponibles avec “Drive Pilot”. [126] À cette époque, Mercedes-Benz a arrêté sa campagne publicitaire de “voiture autonome” qui était en cours aux États-Unis, après avoir rejeté une fois les allégations. [127] [128]
Emploi Les
entreprises travaillant sur la technologie ont un problème de recrutement croissant dans la mesure où le bassin de talents disponibles n’a pas augmenté avec la demande. [129] Ainsi, l’éducation et la formation par des organisations tierces telles que les fournisseurs de cours en ligne et les projets communautaires autodidactes tels que DIY Robocars [130] et Formula Pi ont rapidement gagné en popularité, tandis que les programmes parascolaires de niveau universitaire des programmes tels que Formula Student Driver-less [131] ont renforcé l’expérience des diplômés. L’industrie multiplie régulièrement les sources d’informations librement disponibles, telles que le code, [132] les ensembles de données [133] et les glossaires [134] pour élargir le vivier de recrutement.
Sécurité nationale
Dans les années 2020, de l’importance du secteur automobile pour la nation, la voiture autonome est devenue un sujet de sécurité nationale. Les préoccupations concernant la cybersécurité et la protection des données ne sont pas seulement importantes pour la protection des utilisateurs, mais aussi dans le contexte de la sécurité nationale. La mine de données collectées par les voitures autonomes, associée aux vulnérabilités de la cybersécurité, crée une cible attrayante pour la collecte de renseignements. Les voitures autonomes doivent être considérées d’une manière nouvelle en ce qui concerne le risque d’espionnage. [135]
C’est en juillet 2018 qu’un ancien ingénieur d’Apple a été arrêté par le Federal Bureau of Investigation (FBI) à l’aéroport international de San Jose (SJC) alors qu’il s’apprêtait à embarquer sur un vol vers la Chine et accusé d’avoir volé des informations confidentielles liées au projet de voiture autonome d’Apple. . [136] Et en janvier 2019, un autre employé d’Apple a été accusé d’avoir volé les secrets d’un projet de voiture autonome. [137]
De plus, les technologies émergentes Cellular V2X (Cellular Vehicle-to-Everything) sont basées sur les réseaux sans fil 5G .
Les facteurs humains
Obstacles mobiles
Les voitures autonomes explorent déjà les difficultés de déterminer les intentions des piétons, des cyclistes et des animaux, et des modèles de comportement doivent être programmés dans des algorithmes de conduite. [9] Les usagers humains de la route ont également le défi de déterminer les intentions des véhicules autonomes, où il n’y a pas de conducteur avec qui établir un contact visuel ou échanger des signaux manuels. Drive.ai teste une solution à ce problème qui implique des panneaux LED montés à l’extérieur du véhicule, annonçant des statuts tels que “allez maintenant, ne traversez pas” par rapport à “en attendant que vous traversiez”. [138]
Transfert et compensation des risques
Deux défis liés au facteur humain sont importants pour la sécurité. L’un est le passage de la conduite automatisée à la conduite manuelle. La recherche sur les facteurs humains sur les systèmes automatisés a montré que les gens sont lents à détecter un problème d’automatisation et lents à comprendre le problème une fois qu’il est détecté. Lorsque des échecs d’automatisation se produisent, des transitions inattendues nécessitant la prise en charge d’un pilote se produisent soudainement et le pilote peut ne pas être prêt à prendre le relais. [139]
Le deuxième défi est connu sous le nom de compensation des risques : à mesure qu’un système est perçu comme plus sûr, au lieu de bénéficier entièrement de toute la sécurité accrue, les gens adoptent des comportements plus risqués et bénéficient d’autres avantages. Il a été démontré que les voitures semi-automatisées souffrent de ce problème, par exemple avec des utilisateurs de Tesla Autopilot ignorant la route et utilisant des appareils électroniques ou d’autres activités contre l’avis de l’entreprise selon lequel la voiture n’est pas capable d’être complètement autonome. Dans un avenir proche, les piétons et les cyclistes pourraient se déplacer dans la rue de manière plus risquée s’ils pensent que les voitures autonomes sont capables de les éviter.
Confiance
Pour que les gens achètent des voitures autonomes et votent pour que le gouvernement les autorise sur les routes, la technologie doit être considérée comme sûre. [140] [141] Les ascenseurs autonomes ont été inventés en 1900, mais le nombre élevé de personnes refusant de les utiliser a ralenti leur adoption pendant plusieurs décennies jusqu’à ce que les grèves des opérateurs augmentent la demande et que la confiance s’établisse avec la publicité et des fonctionnalités telles que le bouton d’arrêt d’urgence. [142] [143] Il existe trois types de confiance entre l’humain et l’automatisation. [144] Il existe une confiance dispositionnelle, la confiance entre le conducteur et le produit de l’entreprise ; [144] il existe une confiance situationnelle, ou la confiance de différents scénarios ; [144]et il y a confiance apprise où la confiance est établie entre des événements similaires. [144]
Problèmes moraux
| Apprendre encore plus Le ton ou le style de cette section peut ne pas refléter le ton encyclopédique utilisé sur Wikipédia . ( avril 2022 ) See Wikipedia’s guide to writing better articles for suggestions. (Learn how and when to remove this template message) |
Justification de la responsabilité
Il existe différentes opinions sur la responsabilité en cas d’accident, en particulier lorsque des personnes sont blessées. [145] Outre le fait que le constructeur automobile serait la source du problème dans une situation où une voiture s’écrase en raison d’un problème technique, il existe une autre raison importante pour laquelle les constructeurs automobiles pourraient être tenus responsables : le propriétaire de l’auto-conduite la voiture doit être tenue responsable lorsque l’accident de voiture se produit. Une étude suggère de demander aux propriétaires de voitures autonomes de signer des accords de licence d’utilisateur final (CLUF), leur attribuant la responsabilité de tout accident. [146] D’autres études suggèrent d’introduire une taxe ou des assurances qui protégeraient les propriétaires et les utilisateurs de véhicules automatisés des réclamations faites par les victimes d’un accident.[145] D’autres parties possibles qui peuvent être tenues responsables en cas de défaillance technique comprennent les ingénieurs en logiciel qui ont programmé le code pour le fonctionnement automatisé des véhicules et les fournisseurs de composants du VA. [147]
Problème de chariot
Les véhicules automatisés doivent être programmés pour se comporter dans une situation d’urgence où les passagers ou les autres participants à la circulation tels que les piétons, les cyclistes et les autres conducteurs sont en danger. Un dilemme moral auquel un Ingénieur logiciel ou un constructeur automobile pourrait être confronté lors de la programmation du logiciel d’exploitation est décrit dans une expérience de pensée éthique, le problème du chariot : un conducteur de chariot a le choix de rester sur la voie prévue et de courir plus de cinq personnes, ou tourner le chariot sur une piste où il ne tuerait qu’une seule personne, en supposant qu’il n’y a pas de circulation dessus. [148]Lorsqu’une voiture autonome se trouve dans le scénario suivant : elle roule avec des passagers et soudain une personne apparaît sur son chemin. La voiture doit choisir entre les deux options, soit écraser la personne, soit éviter de la heurter en faisant une embardée contre un mur, tuant les passagers. [149] Il y a deux considérations principales qui doivent être abordées. Les chercheurs ont suggéré, en particulier, deux théories éthiques applicables au comportement des véhicules automatisés en cas d’urgence : la déontologie et l’ utilitarisme . [9] [150] Les trois lois de la robotique d’Asimovsont un exemple typique d’Éthique déontologique. La théorie suggère qu’une voiture automatisée doit suivre des règles écrites strictes qu’elle doit suivre dans n’importe quelle situation. L’utilitarisme suggère l’idée que toute décision doit être prise en fonction de l’objectif de maximiser l’utilité. Cela nécessite une définition de l’utilité qui pourrait être de maximiser le nombre de personnes survivant à un accident. Les critiques suggèrent que les véhicules automatisés devraient adapter un mélange de plusieurs théories pour pouvoir réagir moralement juste en cas d’accident. [9] [150] Récemment, certains cadres éthiques spécifiques, à savoir l’utilitarisme, la déontologie, le relativisme, l’absolutisme (monisme) et le pluralisme, sont étudiés empiriquement en ce qui concerne l’acceptation des voitures autonomes dans les accidents inévitables. [151]
Le MIT Media Lab a animé le problème du chariot dans le contexte des voitures autonomes dans un site Web appelé The Moral Machine. La machine morale génère des scénarios aléatoires dans lesquels les voitures autonomes fonctionnent mal et obligent l’utilisateur à choisir entre deux modes d’action nuisibles. L’expérience Moral Machine du MIT a collecté des données impliquant plus de 40 millions de décisions de personnes dans 233 pays pour déterminer les préférences morales des gens. L’étude du MIT met en lumière le fait que les préférences éthiques varient selon les cultures et les données démographiques et sont probablement en corrélation avec les institutions modernes et les caractéristiques géographiques. [152]
Les tendances mondiales de l’étude du MIT soulignent que, dans l’ensemble, les gens préfèrent sauver la vie des humains plutôt que d’autres animaux, donner la priorité à la vie de beaucoup plutôt qu’à quelques-uns et épargner la vie des jeunes plutôt que des personnes âgées. [152] Les hommes sont légèrement plus susceptibles d’épargner la vie des femmes, et les affiliés religieux sont légèrement plus susceptibles de donner la priorité à la vie humaine. La vie des criminels était plus prioritaire que celle des chats, mais la vie des chiens était plus prioritaire que celle des criminels. [153] La vie des sans-abri a été épargnée plus que celle des personnes âgées, mais la vie des sans-abri a été épargnée moins souvent que celle des obèses. [153]
Les gens expriment massivement une préférence pour que les véhicules autonomes soient programmés avec des idées utilitaires, c’est-à-dire d’une manière qui génère le moins de dommages et minimise les accidents de conduite. [154] Alors que les gens veulent que d’autres achètent des véhicules de promotion utilitaires, ils préfèrent eux-mêmes rouler dans des véhicules qui donnent la priorité à la vie des personnes à l’intérieur du véhicule à tout prix. [154] Cela présente un paradoxe dans lequel les gens préfèrent que d’autres conduisent des véhicules utilitaires conçus pour maximiser les vies préservées dans une situation mortelle, mais veulent rouler dans des voitures qui donnent la priorité à la sécurité des passagers à tout prix. [154]Les gens désapprouvent les réglementations qui promeuvent des vues utilitaires et seraient moins enclins à acheter une voiture autonome qui pourrait choisir de promouvoir le plus grand bien au détriment de ses passagers. [154]
Bonnefon et al. concluent que la réglementation des prescriptions éthiques des véhicules autonomes peut être contre-productive pour la sécurité de la société. [154] En effet, si le gouvernement impose une éthique utilitaire et que les gens préfèrent rouler dans des voitures auto-protectrices, cela pourrait empêcher la mise en œuvre à grande échelle des voitures autonomes. [154] Retarder l’adoption des voitures autonomes compromet la sécurité de la société dans son ensemble car cette technologie devrait sauver tant de vies. [154] Il s’agit d’un exemple paradigmatique de la tragédie des biens communs , dans laquelle des acteurs rationnels répondent à leurs préférences intéressées au détriment de l’utilité sociétale. [155]
Les problèmes liés à la confidentialité
découlent principalement de l’interconnectivité des voitures automatisées, ce qui en fait juste un autre appareil mobile qui peut recueillir toutes les informations sur un individu (voir l’exploration de données ). Cette collecte d’informations va du suivi des itinéraires empruntés, de l’enregistrement vocal, de l’enregistrement vidéo, des préférences dans les médias consommés dans la voiture, des modèles de comportement, à de nombreux autres flux d’informations. [156] [157] [158] L’infrastructure de données et de communication nécessaire pour prendre en charge ces véhicules peut également être capable de surveillance, en particulier si elle est couplée à d’autres ensembles de données et à des analyses avancées . [156]
Essai
Approches
Les essais de véhicules à divers degrés d’automatisation peuvent être effectués soit physiquement, dans un environnement fermé [159] ou, lorsque cela est autorisé, sur la voie publique (nécessitant généralement une licence ou un permis, [160] ou en respectant un ensemble spécifique de conditions d’exploitation ). principes), [161] ou dans un environnement virtuel, c’est-à-dire à l’aide de simulations informatiques. [162] [163] Lorsqu’ils sont conduits sur la voie publique, les véhicules automatisés exigent qu’une personne surveille leur bon fonctionnement et « prenne le relais » au besoin. Par exemple, l’État de New Yorka des exigences strictes pour le conducteur d’essai, de sorte que le véhicule puisse être corrigé à tout moment par un opérateur agréé ; mis en évidence par la candidature de Cardian Cube Company et les discussions avec les responsables de l’État de New York et le NYS DMV. [164]
Désengagements dans les années 2010
 Un prototype de la voiture autonome de Waymo , naviguant dans les rues publiques de Mountain View, Californie en 2017
Un prototype de la voiture autonome de Waymo , naviguant dans les rues publiques de Mountain View, Californie en 2017
En Californie, les constructeurs de voitures autonomes sont tenus de soumettre des rapports annuels pour partager la fréquence à laquelle leurs véhicules se sont désengagés du mode autonome lors des tests. [165] On a cru que nous apprendrions à quel point les véhicules deviennent fiables en fonction de la fréquence à laquelle ils ont besoin de «désengagements». [166]
En 2017, Waymo a signalé 63 désengagements sur 352 545 mi (567 366 km) de tests, une distance moyenne de 5 596 mi (9 006 km) entre les désengagements, la plus élevée parmi les entreprises déclarant de tels chiffres. Waymo a également parcouru une plus grande distance totale que toutes les autres sociétés. Leur taux de 0,18 désengagements par 1 000 mi (1 600 km) en 2017 était une amélioration par rapport aux 0,2 désengagements par 1 000 mi (1 600 km) en 2016 et 0,8 en 2015. En mars 2017, Uber a signalé une moyenne de seulement 0,67 mi (1,08 km). ) par désengagement. Au cours des trois derniers mois de 2017, Cruise (maintenant détenue par GM ) a parcouru en moyenne 5 224 mi (8 407 km) par désengagement sur une distance totale de 62 689 mi (100 888 km). [167]En juillet 2018, la première voiture de course électrique sans conducteur, “Robocar”, a bouclé une piste de 1,8 kilomètre, en utilisant son système de navigation et son intelligence artificielle. [168]
| Constructeur automobile | Californie, 2016 [167] | Californie, 2018 [169] | Californie, 2019 [170] | |||
|---|---|---|---|---|---|---|
| Distance entre désengagements |
Distance totale parcourue | Distance entre désengagements |
Distance totale parcourue | Distance entre désengagements |
Distance totale parcourue | |
| Waymo | 8 253 km | 635 868 mi (1 023 330 km) | 17 951 km | 1 271 587 mi (2 046 421 km) | 11 017 mi (17 730 km) | 1 450 000 mi (2 330 000 km) |
| BMW | 1 027 km | 1 027 km | ||||
| Nissan | 423 km (263 mi) | 9 746 km | 210 mi (340 km) | 8 808 km | ||
| Gué | 317 km | 950 km (590 mi) | ||||
| Moteurs généraux | 55 mi (89 km) | 13 126 km | 8 377 km | 720 376 km | 19 668 km | 1 337 430 km |
| Aptiv | 15 mi (24 km) | 4 278 km | ||||
| Tesla | 4,8 km | 550 mi (890 km) | ||||
| Mercedes Benz | 3,2 km | 1083 km (673 mi) | 1,5 mi (2,4 km) | 2 815 km | ||
| Bosch | 11 km | 983 mi (1 582 km) | ||||
| Zoox | 1 923 mi (3 095 km) | 30 764 mi (49 510 km) | 1 595 mi (2 567 km) | 67 015 mi (107 850 km) | ||
| Nuro | 1 654 km | 24 680 mi (39 720 km) | 3 254 km | 110 662 km | ||
| poney.ai | 1 022 mi (1 645 km) | 26 322 km | 10 422 km | 281 386 km | ||
| Baidu ( Apolong ) | 206 mi (332 km) | 29 118 km | 18 050 mi (29 050 km) | 108 300 mi (174 300 km) | ||
| Aurore | 100 mi (160 km) | 32 858 mi (52 880 km) | 280 mi (450 km) | 63 938 km | ||
| Pomme | 1,1 mi (1,8 km) | 128 337 km | 118 mi (190 km) | 12 141 km | ||
| Uber | 0,4 mi (0,64 km) | 43 290 km | 0 mi (0 km) |
Dans les années 2020
Conformité
En avril 2021, le WP.29 GRVA a publié le document principal sur la “Méthode d’essai pour la conduite automatisée (NATM)”. [171]
En octobre 2021, le test pilote européen complet de conduite automatisée sur la voie publique, L3Pilot, a présenté des systèmes automatisés pour voitures à Hambourg , en Allemagne, en conjonction avec le Congrès mondial ITS 2021 . Les fonctions SAE niveaux 3 et 4 ont été testées sur des routes ordinaires. [172] [173] Fin février 2022, les résultats définitifs du projet L3Pilot ont été publiés. [174]
En novembre 2021, le California Department of Motor Vehicles (DMV) a notifié à Pony.ai qu’il suspendait son permis de test sans conducteur à la suite d’une collision signalée à Fremont le 28 octobre. Cet incident se démarque car le véhicule était en mode autonome et n’a pas n’impliquer aucun autre véhicule. [175]
Dès 2022 [update], les « désengagements » sont au centre de la polémique. Le problème est que les entreprises déclarantes ont des définitions différentes de ce qui constitue un désengagement, et cette définition peut changer avec le temps. [176] [166]
Applications
Camions et camionnettes autonomes
Des entreprises comme Otto et Starsky Robotics se sont concentrées sur les camions autonomes. L’automatisation des camions est importante, non seulement en raison des aspects de sécurité améliorés de ces véhicules très lourds, mais également en raison de la capacité d’économies de carburant grâce au pelotonnage . Des camionnettes autonomes sont utilisées par des épiciers en ligne comme Ocado . [ citation nécessaire ]
Des recherches ont également indiqué que la distribution de marchandises au niveau macro (distribution urbaine) et micro ( livraison du dernier kilomètre ) pourrait être rendue plus efficace avec l’utilisation de véhicules autonomes [177] grâce à la possibilité de véhicules de plus petite taille.
Systèmes de transports
La Chine a suivi le premier bus public automatisé dans la province du Henan en 2015, sur une autoroute reliant Zhengzhou et Kaifeng. [178] [179] Baidu et King Long produisent un minibus automatisé, un véhicule de 14 places, mais sans siège de conduite. Avec 100 véhicules produits, 2018 sera la première année avec un service commercial automatisé en Chine. [180] [181]
En Europe, des villes de Belgique, de France, d’Italie et du Royaume-Uni prévoient d’exploiter des systèmes de transport pour voitures automatisées, [182] [183] [184] et l’Allemagne, les Pays-Bas et l’Espagne ont autorisé les tests publics dans la circulation. En 2015, le Royaume-Uni a lancé des essais publics du module automatisé LUTZ Pathfinder à Milton Keynes . [185] À partir de l’été 2015, le gouvernement français a autorisé PSA Peugeot-Citroën à faire des essais en conditions réelles en région parisienne. Les expérimentations devaient être étendues à d’autres villes comme Bordeaux et Strasbourg d’ici 2016. [186] L’alliance entre les entreprises françaises THALES et Valeo(fournisseur du premier système de voiture en libre-service qui équipe les premi Audi et Mercedes) teste son propre système. [187] La Nouvelle-Zélande envisage d’utiliser des véhicules automatisés pour les transports publics à Tauranga et Christchurch. [188] [189] [190] [191]
Incidents
Pilote automatique Tesla
Depuis novembre 2021 [update], le pilote automatique du système avancé d’assistance à la conduite (ADAS) de Tesla est classé au niveau 2. [192]
Le 20 janvier 2016, le premier des cinq accidents mortels connus d’une Tesla avec pilote automatique s’est produit dans la province chinoise du Hubei. [193] Selon la chaîne d’information chinoise 163.com , cela a marqué “le premier décès accidentel en Chine dû à la conduite automatique (système) de Tesla”. Initialement, Tesla a souligné que le véhicule était si gravement endommagé par l’impact que leur enregistreur n’a pas été en mesure de prouver de manière concluante que la voiture était en pilote automatique à l’époque ; cependant, 163.com a souligné que d’autres facteurs, tels que l’incapacité absolue de la voiture à prendre des mesures d’évitement avant l’accident à grande vitesse, et le bon dossier de conduite du conducteur, semblaient indiquer une forte probabilité que la voiture était sur pilote automatique à le temps. Un accident mortel similaire s’est produit quatre mois plus tard en Floride.[195] En 2018, dans une poursuite civile ultérieure entre le père du conducteur tué et Tesla, Tesla n’a pas nié que la voiture était en pilote automatique au moment de l’accident et a envoyé des preuves au père de la victime documentant ce fait. [196]
Le deuxième accident mortel connu impliquant un véhicule conduit seul a eu lieu à Williston, en Floride, le 7 mai 2016, alors qu’une voiture électrique Tesla Model S était en mode pilote automatique. L’occupant a été tué dans un accident avec un semi-remorque à 18 roues . Le 28 juin 2016, la National Highway Traffic Safety Administration (NHTSA) des États-Unis a ouvert une enquête officielle sur l’accident en collaboration avec la Florida Highway Patrol.. Selon la NHTSA, des rapports préliminaires indiquent que l’accident s’est produit lorsque le semi-remorque a effectué un virage à gauche devant la Tesla à une intersection sur une autoroute à accès non contrôlé et que la voiture n’a pas appliqué les freins. La voiture a poursuivi sa route après être passée sous la remorque du camion. [197] [198] L’évaluation préliminaire de la NHTSA a été ouverte pour examiner la conception et les performances de tout système de conduite automatisé utilisé au moment de l’accident, qui impliquait une population d’environ 25 000 voitures Model S. [199]Le 8 juillet 2016, la NHTSA a demandé à Tesla Motors de fournir à l’agence des informations détaillées sur la conception, le fonctionnement et les tests de sa technologie de pilote automatique. L’agence a également demandé des détails sur toutes les modifications de conception et les mises à jour du pilote automatique depuis son introduction, ainsi que sur le calendrier des mises à jour prévues par Tesla pour les quatre prochains mois. [200]
Selon Tesla, “ni le pilote automatique ni le conducteur n’ont remarqué le côté blanc du semi-remorque contre un ciel très éclairé, donc le frein n’a pas été appliqué”. La voiture a tenté de rouler à pleine vitesse sous la remorque, “le bas de la remorque heurtant le pare-brise de la Model S”. Tesla a également affirmé qu’il s’agissait du premier décès connu de pilote automatique de Tesla sur plus de 130 millions de miles (210 millions de kilomètres) parcourus par ses clients avec le pilote automatique engagé, mais par cette déclaration, Tesla refusait apparemment de reconnaître les affirmations selon lesquelles le décès de janvier 2016 dans le Hubei en Chine avait également été le résultat d’une erreur du système de pilote automatique. Selon Tesla, il y a un décès tous les 94 millions de miles (151 millions de kilomètres) parmi tous les types de véhicules aux États-Unis [197] [198] [201]Cependant, ce nombre comprend également les décès des accidents, par exemple, des conducteurs de moto avec des piétons. [202] [203]
En juillet 2016, le National Transportation Safety Board (NTSB) des États-Unis a ouvert une enquête officielle sur l’accident mortel alors que le pilote automatique était engagé. Le NTSB est un organisme d’enquête qui a le pouvoir de faire uniquement des recommandations politiques. Un porte-parole de l’agence a déclaré: “Cela vaut la peine d’y jeter un coup d’œil et de voir ce que nous pouvons apprendre de cet événement, afin que, à mesure que cette automatisation soit plus largement introduite, nous puissions le faire de la manière la plus sûre possible.” [204] En janvier 2017, le NTSB a publié le rapport concluant que Tesla n’était pas en faute; l’enquête a révélé que pour les voitures Tesla, le taux d’accident avait chuté de 40 % après l’installation du pilote automatique. [205]
En 2021, le président du NTSB a appelé Tesla à modifier la conception de son pilote automatique pour garantir qu’il ne puisse pas être utilisé à mauvais escient par les conducteurs, selon une lettre envoyée au PDG de l’entreprise. [192]
Waymo
 La voiture automatisée interne de Google
La voiture automatisée interne de Google
Waymo est né d’un projet de voiture autonome au sein de Google . En août 2012, Google a annoncé que ses véhicules avaient parcouru plus de 300 000 miles de conduite automatisée (500 000 km) sans accident, impliquant généralement une douzaine de voitures sur la route à un moment donné, et qu’ils commençaient à tester avec des conducteurs seuls à la place. de par paires. [206] Fin mai 2014, Google a révélé un nouveau prototype qui n’avait ni volant, ni pédale d’accélérateur, ni pédale de frein, et qui était entièrement automatisé. [207] En mars 2016 [update], Google avait testé sa flotte en mode automatisé sur un total de 1 500 000 mi (2 400 000 km). [208]En décembre 2016, Google Corporation a annoncé que sa technologie serait transférée à une nouvelle société appelée Waymo, Google et Waymo devenant des filiales d’une nouvelle société mère appelée Alphabet . [209] [210]
Selon les rapports d’accidents de Google au début de 2016, leurs voitures d’essai avaient été impliquées dans 14 collisions, dont d’autres conducteurs étaient en faute 13 fois, bien qu’en 2016, le logiciel de la voiture ait provoqué un accident. [211]
En juin 2015, Brin a confirmé que 12 véhicules avaient subi des collisions à cette date. Huit ont impliqué des collisions par l’arrière à un panneau d’arrêt ou à un feu de circulation, deux dans lesquelles le véhicule a été balayé latéralement par un autre conducteur, une dans laquelle un autre conducteur a traversé un panneau d’arrêt et une où un employé de Google contrôlait la voiture manuellement. [212] En juillet 2015, trois employés de Google ont subi des blessures mineures lorsque leur véhicule a été heurté par l’arrière par une voiture dont le conducteur n’a pas freiné à un feu de circulation. C’était la première fois qu’une collision faisait des blessés. [213]Le 14 février 2016, un véhicule de Google a tenté d’éviter que des sacs de sable ne bloquent son chemin. Au cours de la manœuvre, il a percuté un bus. Google a déclaré: “Dans ce cas, nous portons clairement une part de responsabilité, car si notre voiture n’avait pas bougé, il n’y aurait pas eu de collision.” [214] [215] Google a caractérisé le crash comme un malentendu et une expérience d’apprentissage. Aucun blessé n’a été signalé dans l’accident. [211]
Uber ATG
En mars 2018, Elaine Herzberg est devenue la première piétonne tuée par une voiture autonome aux États-Unis après avoir été percutée par un véhicule Uber, également à Tempe. Herzberg traversait à l’extérieur d’un passage pour piétons , à environ 400 pieds d’une intersection. [216] C’est la première fois qu’un individu est connu pour avoir été tué par un véhicule autonome et est considéré comme soulevant des questions sur la réglementation entourant l’industrie automobile autonome en plein essor. [217] Certains experts disent qu’un conducteur humain aurait pu éviter l’accident mortel. [218] Doug Ducey , gouverneur de l’Arizonaa ensuite suspendu la capacité de l’entreprise à tester et à faire fonctionner ses voitures automatisées sur les voies publiques, invoquant un “échec incontestable” de l’attente selon laquelle Uber ferait de la sécurité publique sa priorité absolue. [219] Uber s’est retiré de tous les tests de voitures autonomes en Californie à la suite de l’accident. [220] Le 24 mai 2018, le National Transport Safety Board des États-Unis a publié un rapport préliminaire. [221]
En septembre 2020, la conductrice suppléante a été inculpée d’homicide par négligence, car elle n’a pas regardé la route pendant plusieurs secondes alors que sa télévision diffusait The Voice diffusé par Hulu . Uber ne fait face à aucune accusation pénale car aux États-Unis, il n’y a aucune base de responsabilité pénale pour la société. La conductrice est supposée responsable de l’accident, car elle était dans le siège du conducteur en capacité d’éviter un accident (comme dans un niveau 3). Le procès est prévu pour février 2021. [222] [ nécessite une mise à jour ]
Système de conduite Navya Arma
Le 9 novembre 2017, un bus autonome automatisé Navya Arma avec passagers a été impliqué dans un accident avec un camion. Le camion s’est avéré responsable de l’accident, faisant marche arrière dans le bus automatisé à l’arrêt. L’autobus automatisé n’a pas pris de mesures d’évitement ni appliqué de techniques de conduite défensives telles que faire clignoter ses phares ou klaxonner. Comme l’a commenté un passager, “La navette n’avait pas la capacité de reculer. La navette est simplement restée immobile.” [223]
NIO Naviguer sur Pilote
Le 12 août 2021, un Chinois de 31 ans a été tué après que son NIO ES8 est entré en collision avec un véhicule de construction. [224] La fonction de conduite autonome de NIO est toujours en version bêta et ne peut pas encore gérer les obstacles statiques. [225] Bien que le manuel du véhicule indique clairement que le conducteur doit prendre le relais à l’approche des chantiers de construction, la question est de savoir si la caractéristique a été mal commercialisée et dangereuse. Les avocats de la famille du défunt ont également remis en question l’accès privé de NIO au véhicule, qui, selon eux, pourrait conduire à la falsification des données. [226]
Fonctionnement de la Toyota e-Palette
Le 26 août 2021, une Toyota e-Palette , un véhicule de mobilité utilisé pour soutenir la mobilité au sein du Village des athlètes aux Jeux Olympiques et Paralympiques de Tokyo 2020 , est entrée en collision avec un piéton malvoyant sur le point de traverser un passage pour piétons. [227] La suspension a été faite après l’accident, et a redémarré le 31 avec des mesures de sécurité améliorées. [228]
Sondages d’opinion publique
Dans une enquête en ligne réalisée en 2011 auprès de 2 006 consommateurs américains et britanniques par Accenture , 49 % ont déclaré qu’ils seraient à l’aise avec une « voiture sans conducteur ». [229]
Une enquête réalisée en 2012 auprès de 17 400 propriétaires de véhicules par JD Power and Associates a révélé que 37 % avaient initialement déclaré qu’ils seraient intéressés par l’achat d’une « voiture entièrement autonome ». Cependant, ce chiffre est tombé à 20% si on lui disait que la technologie coûterait 3 000 dollars de plus. [230]
Dans une enquête réalisée en 2012 auprès d’environ 1 000 conducteurs allemands par le chercheur automobile Puls, 22 % des personnes interrogées avaient une attitude positive envers ces voitures, 10 % étaient indécises, 44 % étaient sceptiques et 24 % étaient hostiles. [231]
Une enquête réalisée en 2013 auprès de 1 500 consommateurs dans 10 pays par Cisco Systems a révélé que 57% “ont déclaré qu’ils seraient susceptibles de rouler dans une voiture entièrement contrôlée par une technologie qui ne nécessite pas de conducteur humain”, le Brésil, l’Inde et la Chine étant les plus disposés à faire confiance technologie automatisée. [232]
Dans une enquête téléphonique américaine réalisée en 2014 par Insurance.com , plus des trois quarts des conducteurs titulaires d’un permis ont déclaré qu’ils envisageraient au moins d’acheter une voiture autonome, ce chiffre atteignant 86 % si l’assurance automobile était moins chère. 31,7 % ont déclaré qu’ils ne continueraient pas à conduire une fois qu’une voiture automatisée serait disponible à la place. [233]
Dans une enquête de février 2015 auprès des meilleurs journalistes automobiles, 46 % ont prédit que Tesla ou Daimler seraient les premiers sur le marché avec un véhicule entièrement autonome, tandis que (à 38 %) Daimler était censé être le plus fonctionnel, le plus sûr et le plus sûr. -demande de véhicule autonome. [234]
En 2015, une enquête par questionnaire de l’Université de technologie de Delft a exploré l’opinion de 5 000 personnes de 109 pays sur la conduite automatisée. Les résultats ont montré que les répondants, en moyenne, considéraient la conduite manuelle comme le mode de conduite le plus agréable. 22 % des personnes interrogées ne souhaitaient pas dépenser d’argent pour un système de conduite entièrement automatisé. Les répondants se sont avérés les plus préoccupés par le piratage/l’utilisation abusive des logiciels, et étaient également préoccupés par les problèmes juridiques et la sécurité. Enfin, les répondants des pays plus développés (en termes de statistiques d’accidents plus faibles, d’éducation plus élevée et de revenus plus élevés) étaient moins à l’aise avec leur véhicule transmettant des données. [235]L’enquête a également donné des résultats sur l’opinion des consommateurs potentiels concernant l’intérêt d’acheter une voiture automatisée, indiquant que 37 % des propriétaires actuels interrogés étaient “certainement” ou “probablement” intéressés par l’achat d’une voiture automatisée. [235]
En 2016, une enquête en Allemagne a examiné l’opinion de 1 603 personnes, représentatives en termes d’âge, de sexe et d’éducation de la population allemande, à l’égard des voitures partiellement, hautement et entièrement automatisées. Les résultats ont montré que les hommes et les femmes différaient dans leur volonté de les utiliser. Les hommes ressentaient moins d’anxiété et plus de joie envers les voitures automatisées, alors que les femmes montraient exactement le contraire. La différence entre les sexes vis-à-vis de l’anxiété était particulièrement prononcée entre les jeunes hommes et les femmes, mais diminuait avec l’âge des participants. [236]
En 2016, une enquête PwC , aux États-Unis, montrant l’opinion de 1 584 personnes, souligne que « 66 % des personnes interrogées ont déclaré qu’elles pensaient que les voitures autonomes sont probablement plus intelligentes que le conducteur humain moyen ». Les gens sont toujours inquiets pour la sécurité et surtout le fait de se faire pirater la voiture. Néanmoins, seuls 13% des personnes interrogées ne voient aucun avantage à ce nouveau type de voitures. [237]
En 2017, le Pew Research Center a interrogé 4 135 adultes américains du 1er au 15 mai et a constaté que de nombreux Américains anticipent des impacts significatifs de diverses technologies d’automatisation au cours de leur vie, de l’adoption généralisée de véhicules automatisés au remplacement de catégories d’emploi entières par des robots. ouvriers. [238]
En 2019, les résultats de deux sondages d’opinion auprès de 54 et 187 adultes américains respectivement ont été publiés. Un nouveau questionnaire standardisé, le modèle d’acceptation des véhicules autonomes (AVAM) a été développé, y compris une description supplémentaire pour aider les répondants à mieux comprendre les implications des différents niveaux d’automatisation. Les résultats ont montré que les utilisateurs acceptaient moins les niveaux d’autonomie élevés et affichaient une intention significativement plus faible d’utiliser des véhicules hautement autonomes. De plus, l’autonomie partielle (quel que soit le niveau) était perçue comme nécessitant un engagement du conducteur uniformément plus élevé (utilisation des mains, des pieds et des yeux) que l’autonomie complète. [239]
Régulation
Conventions sur la circulation routière
La Convention de Genève sur la circulation routière, souscrite par plus de 101 pays dans le monde, exige que le conducteur ait 18 ans.
La Convention de Vienne sur la circulation routière de 1968 , souscrite par 83 pays dans le monde, établit des principes régissant le code de la route. L’un des principes fondamentaux de la convention était le concept selon lequel un conducteur est toujours entièrement maître et responsable du comportement d’un véhicule dans la circulation. [240] En 2016, une réforme de la convention a ouvert des possibilités de fonctionnalités automatisées pour les pays ratifiés. [241]
En janvier 2021, la proposition d’amendement à l’article 1 et au nouvel article 34 bis de la Convention de Vienne de 1968 sur la circulation routière a été transmise à un délai d’un an pour acceptation. [242] Le 14 janvier 2022, l’amendement à la convention a été accepté et il devrait entrer en vigueur le 14 juillet 2022. [243]
CEE-ONU WP.29 GRVA
En février 2018, le Comité des transports intérieurs (ITC) de la CEE -ONU a reconnu l’importance des activités du WP.29 liées aux véhicules automatisés, autonomes et connectés et a demandé au WP.29 d’envisager la création d’un groupe de travail dédié. Suite à cette demande, le WP.29, à sa session de juin 2018, a décidé de transformer le Groupe de travail des freins et des organes de roulement (GRRF) en un nouveau Groupe de travail des véhicules automatisés/autonomes et connectés (GRVA). [244]
En juin 2020, la réunion virtuelle du WP.29 a approuvé les rapports du GRVA sur sa cinquième session sur les “véhicules automatisés/autonomes et connectés” et sa sixième session sur “la cybersécurité et les mises à jour logicielles”. [245] Le nouveau règlement sur la cybersécurité a été attribué en tant que règlement 155 et le nouveau règlement sur les mises à jour de logiciels a été attribué en tant que règlement 156. De cette manière, le règlement de l’ONU sur le niveau 3 a été établi. [246]
En mars 2021, les règlements CEE-ONU suivants ont été publiés :
- Règlement 155 : Cybersécurité et système de gestion de la cybersécurité [247]
- Règle 156 : Mise à jour logicielle et système de gestion des mises à jour logicielles [248]
- Règlement 157 : Systèmes automatisés de suivi de voie (ALKS) [249]
Le 22 janvier 2022, ces réglementations entrent en vigueur dans certains pays. [ citation nécessaire ]
Législation et réglementation au Japon
Le Japon est un pays non signataire de la Convention de Vienne. En 2019, le Japon a amendé deux lois, “Road Traffic Act” et “Road Transport Vehicle Act”, [250] et elles sont entrées en vigueur en avril 2020. Dans l’ancienne loi, les voitures autonomes de niveau 3 sont devenues autorisées sur les routes publiques. [251] Dans cette dernière loi, le processus de désignation des types de certification de sécurité pour la fonction de conduite autonome de niveau 3 du système de conduite autonome (ADS) et le processus de certification pour le type affirmé ont été légalement définis. [252] Grâce au processus d’amendement, les réalisations du projet national “SIP-adus” mené par le Cabinet Office depuis 2014 ont été pleinement prises en compte et acceptées. [253]
En 2020, la prochaine étape du plan de feuille de route au niveau national a été officiellement publiée, qui avait pris en compte le déploiement social et l’acceptabilité du niveau 4. [254] [255] Fin 2020, le ministère des Terres, des Infrastructures, des Transports et du Tourisme (MLIT) a modifié son “Règlement de sécurité pour les véhicules de transport routier” pour refléter les engagements de la CEE -ONU WP.29 GRVA sur la cybersécurité et les mises à jour logicielles, et le règlement est entré en vigueur en janvier 2021. [256] [257]
En avril 2021, l’Agence nationale de police (NPA) a publié le rapport de son comité d’experts de l’exercice 2020 sur un résumé des problèmes de recherche pour réaliser des services de mobilité de niveau 4, y compris les problèmes de modification juridique requis. [258] [259] [260] Au cours de l’été 2021, le ministère de l’Économie, du Commerce et de l’Industrie (METI) s’est préparé avec le MLIT à lancer un projet “Road to the L4” pour couvrir la R&D avec déploiement social pour réaliser une mobilité de niveau 4 acceptable service et a mis à jour ses informations publiques en septembre. Dans le cadre de ce projet, le problème de responsabilité en droit civil reflétant l’évolution des rôles sera clarifié. [261] [262]
Concernant les représentations trompeuses dans le marketing, l’article 5 de la “Loi contre les primes injustifiées et les représentations trompeuses” s’applique. [263] [264] [125]
Fin 2021, la NPA a proposé un projet de loi d’amendement sur le «Road Traffic Act» pour inclure l’approbation du schéma pour les services de niveau 4. [265] En mars 2022, le gouvernement japonais a adopté le projet de loi modifiant la loi. [266] En avril 2022, le projet de loi a été délibéré à la session ordinaire de la Diète nationale et adopté. En vertu de la loi modifiée, un système de licence sera introduit pour les opérateurs de services de transport utilisant des véhicules sans pilote de niveau 4, qui ne nécessite aucun conducteur dans le véhicule surveillé à distance dans une zone limitée. Ces véhicules devraient être utilisés pour les résidents des zones dépeuplées. [267]
Statut juridique aux États-Unis
Aux États-Unis, pays non signataire de la Convention de Vienne, les codes des véhicules des États n’envisagent généralement pas, mais n’interdisent pas nécessairement, les véhicules hautement automatisés à partir de 2012 [update]. [268] [269] Pour clarifier le statut juridique de ces véhicules et autrement réglementer ces véhicules, plusieurs États ont promulgué ou envisagent des lois spécifiques. [270] En 2016, sept États (Nevada, Californie, Floride, Michigan, Hawaï, Washington et Tennessee), ainsi que le district de Columbia , ont promulgué des lois sur les véhicules automatisés. Des incidents tels que le premier accident mortel du système Autopilot de Tesla ont conduit à des discussions sur la révision des lois et des normes pour les voitures automatisées.
En 2017, la Chambre des représentants contrôlée par les républicains a adopté à l’unanimité le “SELF DRIVE Act” qui accélérerait l’adoption des voitures autonomes et empêcherait les États de fixer des normes de performance. Cependant, un projet de loi complémentaire au Sénat , “AV START”, n’a pas été adopté après que les démocrates ont soulevé des objections selon lesquelles il ne faisait pas assez pour répondre aux problèmes de sécurité et de responsabilité. [271] Aux États-Unis, aucune structure réglementaire complète n’a encore vu le jour, que ce soit au niveau fédéral ou au niveau des États. [272]
Politiques fédérales
En septembre 2016, le Conseil économique national des États-Unis et le Département des transports des États-Unis (USDOT) ont publié la Federal Automated Vehicles Policy [273] , qui sont des normes qui décrivent comment les véhicules automatisés doivent réagir en cas de défaillance de leur technologie, comment protéger la vie privée des passagers et comment les coureurs doivent être protégés en cas d’accident. Les nouvelles directives fédérales visent à éviter un patchwork de lois étatiques, tout en évitant d’être trop autoritaires pour étouffer l’innovation. [274] Depuis lors, l’USDOT a publié plusieurs mises à jour :
- Systèmes de conduite automatisés : une vision pour la sécurité 2.0 (12 septembre 2017) [275]
- Se préparer pour l’avenir des transports : Véhicules automatisés 3.0 (4 octobre 2018) [276]
- Assurer le leadership américain dans les technologies de véhicules automatisés : véhicules automatisés 4.0 (8 janvier 2020) [277]
La National Highway Traffic Safety Administration (NHTSA) a publié pour commentaires publics le Occupant Protection for Automated Driving System le 30 mars 2020, [278] suivi du Framework for Automated Driving System Safety le 3 décembre 2020. [279] Occupant Protection vise à moderniser les normes fédérales de sécurité des véhicules automobiles en envisageant la suppression des commandes manuelles avec des systèmes de conduite automatisés, [280] tandis que le cadreLe document vise à fournir un moyen objectif de définir et d’évaluer la compétence du système de conduite automatisée pour assurer la sécurité des véhicules à moteur tout en restant flexible pour s’adapter au développement de fonctionnalités visant à améliorer la sécurité. [281]
Historiquement, un véhicule sans commandes de conduite telles qu’un volant, une pédale d’accélérateur et une pédale de frein ne serait pas conforme aux normes fédérales de sécurité des véhicules automobiles (FMVSS), l’équipement de sécurité minimum nécessaire pour vendre légalement un véhicule au public. Le 10 mars 2022, la NHTSA a mis à jour et finalisé la règle sur les exigences de sécurité pour la protection des occupants qui permet désormais à un véhicule sans commandes de conduite de se conformer à la réglementation américaine. [282] [283]
Politiques de l’État 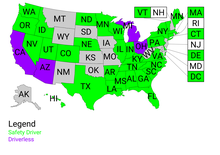 États américains qui autorisent les essais de véhicules autonomes sur la voie publique à partir de juin 2018 [update]
États américains qui autorisent les essais de véhicules autonomes sur la voie publique à partir de juin 2018 [update]
Vue
d’ensemble En avril 2022 [update], 38 États avaient des lois ou des décrets relatifs aux véhicules autonomes. [284] [285]
Nevada
En juin 2011, la législature du Nevada a adopté une loi autorisant l’utilisation de voitures automatisées. Le Nevada est ainsi devenu la première juridiction au monde où les véhicules automatisés pourraient être légalement exploités sur les routes publiques. Selon la loi, le département des véhicules à moteur du Nevada est responsable de l’établissement des normes de sécurité et de performance et l’agence est responsable de la désignation des zones où les voitures automatisées peuvent être testées. [286] [287] [288] Cette législation a été soutenue par Google dans le but de mener légalement des tests supplémentaires de sa voiture sans conducteur Google . [289] La loi du Nevada définit un véhicule automatisé comme « un véhicule à moteur qui utilisel’intelligence artificielle , les capteurs et les coordonnées du système de positionnement global pour se conduire sans l’intervention active d’un opérateur humain”. La loi reconnaît également que l’opérateur n’aura pas besoin de faire attention pendant que la voiture fonctionne elle-même. Google avait en outre fait pression pour une exemption de une interdiction de la distraction au volant pour permettre aux occupants d’envoyer des SMS tout en étant assis derrière le volant, mais cela n’est pas devenu une loi. [289] [290] [291] lors des essais [292]
Floride
En avril 2012, la Floride est devenue le deuxième État à autoriser les essais de voitures automatisées sur la voie publique. [293]
 Une Toyota Prius modifiée par Google pour fonctionner comme une voiture sans conducteur
Une Toyota Prius modifiée par Google pour fonctionner comme une voiture sans conducteur
Californie
La Californie est devenue le troisième État à autoriser les tests de voitures automatisés lorsque le gouverneur Jerry Brown a promulgué la loi SB 1298 en septembre 2012 au siège de Google à Mountain View . [294]
Le 19 février 2016, le projet de loi 2866 de l’Assemblée de Californie a été introduit en Californie, qui permettrait aux véhicules automatisés de circuler sur les routes publiques, y compris ceux sans conducteur, volant, pédale d’accélérateur ou pédale de frein. Le projet de loi stipule que le California Department of Motor Vehicles devrait se conformer à ces réglementations d’ici le 1er juillet 2018 pour que ces règles entrent en vigueur. En novembre 2016 [update], ce projet de loi n’avait pas encore été adopté par la maison d’origine. [295] La Californie a publié des discussions sur la proposition de politique fédérale sur les véhicules automatisés en octobre 2016. [296]
En décembre 2016, le California Department of Motor Vehicles a ordonné à Uber de retirer ses véhicules autonomes de la route en réponse à deux infractions aux feux rouges. Uber a immédiatement imputé les violations à une erreur humaine et a suspendu les chauffeurs. [297]
Dans le code du district de Washington, DC :
« Véhicule autonome » désigne un véhicule capable de naviguer sur les routes du district et d’interpréter les dispositifs de contrôle de la circulation sans qu’un conducteur n’active activement l’un des systèmes de contrôle du véhicule. Le terme “véhicule autonome” exclut un véhicule à moteur équipé de systèmes de sécurité active ou de systèmes d’assistance à la conduite, y compris les systèmes d’assistance électronique dans les angles morts, d’évitement de collision, de freinage d’urgence, d’aide au stationnement, de régulateur de vitesse adaptatif, d’assistance au maintien de voie, – l’avertissement de départ ou l’assistance aux embouteillages et aux files d’attente, à moins que le système seul ou en combinaison avec d’autres systèmes ne permette au véhicule sur lequel la technologie est installée de rouler sans contrôle actif ni surveillance par un opérateur humain.
Dans le même code de district, il est considéré que :
Un véhicule autonome peut circuler sur la voie publique ; à condition que le véhicule :
- (1) Dispose d’une fonction de commande manuelle qui permet au conducteur de prendre le contrôle du véhicule autonome à tout moment ;
- (2) Dispose d’un conducteur assis dans le siège de contrôle du véhicule pendant son fonctionnement qui est prêt à prendre le contrôle du véhicule autonome à tout moment ; et
- (3) Est capable de fonctionner conformément aux lois sur la circulation et aux lois sur les véhicules à moteur applicables du district et aux dispositifs de contrôle de la circulation.
Michigan et autres
En décembre 2013, le Michigan est devenu le quatrième État à autoriser les essais de voitures sans conducteur sur la voie publique. [298] En juillet 2014, la ville de Coeur d’Alene, dans l’Idaho, a adopté une ordonnance sur la robotique qui comprend des dispositions autorisant les voitures autonomes. [299]
Législation au Royaume-Uni
En 2013, le gouvernement du Royaume-Uni a autorisé les essais de voitures automatisées sur la voie publique. [300] Avant cela, tous les essais de véhicules robotiques au Royaume-Uni avaient été effectués sur une propriété privée. [300]
En juillet 2018, la « Loi de 2018 sur les véhicules automatisés et électriques » a reçu la sanction royale . [301]
En mars 2019, le Royaume-Uni est devenu un pays signataire de la Convention de Vienne. [302]
En 2021, le Royaume-Uni a travaillé sur un projet de loi autorisant les systèmes de maintien de voie automatisés autonomes (ALKS) jusqu’à 37 mph (ou 60 km/h [303] ) après une réaction mitigée d’experts lors de la consultation lancée à l’été 2020. [ 304] Ce système serait autorisé à redonner le contrôle au conducteur lorsque des “événements imprévus” tels que la construction de routes ou des intempéries se produisent. [305] Le Centre for Connected and Autonomous Vehicles (CCAV) a demandé à la Law Commission of England and Wales et à la Scottish Law Commissionentreprendre une révision en profondeur du cadre juridique des véhicules “automatisés” et de leur utilisation dans le cadre des réseaux de transport public et des services de transport à la demande. Les équipes ont élaboré une politique et le rapport d’analyse complet a été publié en janvier 2022. [306] [307]
À propos de la représentation trompeuse dans le marketing, la Society of Motor Manufacturers and Traders (SMMT) a publié les principes directeurs suivants :
- Un dispositif de conduite automatisée doit être décrit de manière suffisamment claire pour ne pas induire en erreur, notamment en précisant les circonstances dans lesquelles ce dispositif peut fonctionner.
- Une fonction de conduite automatisée doit être décrite de manière suffisamment claire pour être distinguée d’une fonction de conduite assistée.
- Lorsque des fonctions de conduite automatisée et de conduite assistée sont décrites, elles doivent être clairement distinguées l’une de l’autre.
- Une fonction de conduite assistée ne doit pas être décrite d’une manière qui pourrait donner l’impression qu’il s’agit d’une fonction de conduite automatisée.
- Le nom d’une fonction de conduite automatisée ou assistée ne doit pas induire en erreur en laissant entendre qu’il s’agit de l’autre – des mots auxiliaires peuvent être nécessaires pour éviter toute confusion – par exemple pour une fonction de conduite assistée, en indiquant clairement que le conducteur doit avoir le contrôle à tout moment fois. [308]
En avril 2022, le gouvernement britannique a confirmé les changements prévus au « code de la route », en réponse à une consultation publique. Les changements clarifieront les responsabilités des conducteurs dans les véhicules autonomes, y compris lorsqu’un conducteur doit être prêt à reprendre le contrôle. [309]
Législation en Europe
UE
En novembre 2019, le règlement (UE) 2019/2144 du Parlement européen et du Conseil relatif aux exigences en matière de réception par type des véhicules à moteur a défini des exigences spécifiques relatives aux véhicules automatisés et aux véhicules entièrement automatisés. Cette loi est applicable à partir de 2022 et est basée sur des procédures uniformes et des spécifications techniques pour les systèmes et autres éléments. [310]
France
La France est un pays signataire de la Convention de Vienne. En 2014, le gouvernement français a annoncé que les essais de voitures automatisées sur la voie publique seraient autorisés en 2015. 2000 km de route seraient ouverts à travers le territoire national, notamment à Bordeaux, en Isère, en Île-de-France et à Strasbourg. Lors du congrès mondial ITS 2015, conférence dédiée aux systèmes de transport intelligents, la toute première démonstration de véhicules automatisés sur route ouverte en France a été réalisée à Bordeaux début octobre 2015. [311]
En mai 2018, le gouvernement a publié la première version de la stratégie française de développement de la mobilité routière automatisée pour mettre en place le cadre législatif, et elle a abouti en décembre 2019 à « La loi d’orientation de la mobilité ». [312] [313]
En décembre 2020, le gouvernement a mis à jour la stratégie pour faire de la France le lieu privilégié en Europe pour le déploiement des services automatisés de mobilité routière. [312]
Le cadre législatif et réglementaire du déploiement des véhicules et systèmes de transport automatisés a été fixé par une ordonnance en avril 2021 et un décret suivant en juin 2021. [314] Le cadre législatif et réglementaire de l’exploitation des véhicules automatisés résultant de l’article 31 du ” la loi d’orientation de la mobilité » devrait être finalisée au premier trimestre de 2022. [315]
Allemagne
L’Allemagne est un pays signataire de la Convention de Vienne. En juillet 2021, la “loi fédérale modifiant la loi sur la circulation routière et la loi sur l’assurance obligatoire” est entrée en vigueur. La loi autorise les véhicules à moteur dotés de capacités de conduite autonomes, c’est-à-dire les véhicules capables d’effectuer des tâches de conduite de manière autonome sans qu’une personne ne conduise, dans des zones d’exploitation spécifiées sur la voie publique. Les dispositions relatives à la conduite autonome dans les zones d’exploitation appropriées correspondent au niveau 4. [316]
En février 2022, le ministère fédéral du numérique et des transports (BMDV) a soumis au Bundesrat allemand l'”Ordonnance sur l’agrément et l’exploitation des véhicules à moteur dotés de fonctions de conduite autonomes dans des zones d’exploitation spécifiées – Ordonnance sur l’agrément et l’exploitation des véhicules autonomes (AFGBV)” pour approbation. [317]
Législation en Amérique du Nord
Canada
Le Canada est un pays non signataire de la Convention de Vienne. Au niveau fédéral, la « Loi sur la sécurité automobile » réglemente les véhicules à moteur, qui a été modifiée pour la dernière fois en février 2020. [318]
En août 2021, Transports Canada a publié la version 2.0 des « Lignes directrices pour l’essai des systèmes de conduite automatisés au Canada ». [319]
Législation en Asie
Chine
Pour des raisons historiques, la Chine n’est pas un pays signataire de la Convention de Genève de 1949 [320] bien qu’elle soit un pays signataire de la Convention de Vienne de 1968. [321] Les lois sont élaborées par l’Assemblée populaire nationale et son Comité permanent qui sont sous le contrôle du Parti communiste chinois .
En 2018, la Chine a introduit des réglementations de test pour réglementer les voitures autonomes, pour l’automatisation conditionnelle, l’automatisation de haut niveau et l’automatisation complète (correspondant approximativement au niveau 3, au niveau 4 et au niveau 5). [322] Les règles énoncent les exigences selon lesquelles les véhicules doivent d’abord être testés dans des zones non publiques, que les tests routiers ne peuvent avoir lieu que dans des rues désignées et qu’une personne qualifiée doit toujours s’asseoir à la place du conducteur, prête à prendre le contrôle. [323]
En février 2020, onze départements constitutifs, représentés par la Commission nationale du développement et de la réforme (NDRC), ont publié conjointement la “Stratégie pour l’innovation et le développement des véhicules intelligents” qui décrit le plan de feuille de route jusqu’en 2025. Ce plan indique la nécessité de réviser le ” Loi sur la sécurité routière », et loi sur la topographie et la cartographie des véhicules intelligents. [324]
En mars 2020, le ministère de l’Industrie et des Technologies de l’information (MIIT) a publié un projet GB/T sur le cadre de classification à 6 niveaux pour la conduite de l’automatisation, qui correspond essentiellement aux niveaux SEA. Et en avril 2020, le MIIT a publié l’objectif de l’année qui est d’achever la formulation d’un cadre pour les fonctions d’assistance à la conduite et la conduite autonome de bas niveau (niveau 3). [325] En janvier 2021, le MIIT prévoyait d’ajouter des autoroutes à la liste des routes où les autorités provinciales et municipales pouvaient autoriser les voitures automatisées. [326]
En mars 2021, le ministère de la Sécurité publique (MPS) a publié un projet d’amendements proposés à la “loi sur la sécurité routière”. [327] En août 2021, l’ Administration du cyberespace de Chine (CAC) et le MIIT ont publié “les dispositions sur la gestion de la sécurité des données automobiles (essai)”. [328] En septembre 2021, la « loi sur la sécurité des données » est entrée en vigueur, ce qui étend largement la portée extraterritoriale des règles chinoises existantes en matière de données. [329]
En février 2022, le MIIT a publié le deuxième projet de “Mesures administratives pour la sécurité des données dans les domaines de l’industrie et des technologies de l’information”. Et en mars 2022, le MIIT a publié “les Lignes directrices pour la construction du système standard de cybersécurité et de sécurité des données de l’Internet des véhicules”. [330]
Législation en Océanie
Australie L’
Australie est un pays non signataire de la Convention de Vienne. La Commission nationale des transports (NTC) est chargée de réformer les lois actuelles tout en assurant la cohérence au niveau national. [331] En février 2022, NTC a publié un document d’orientation pour présenter des propositions sur le cadre réglementaire de bout en bout pour le déploiement commercial de véhicules automatisés. [332]
Le Département des Infrastructures, des Transports, du Développement Régional et des Communications (DITRDC) est chargé d’élaborer leurs politiques et projets de loi sur la première fourniture et la loi sur les véhicules automatisés en service. [333]
Nouvelle-Zélande
La Nouvelle -Zélande est un pays non signataire de la Convention de Vienne. La législation néo-zélandaise n’exige pas spécifiquement qu’un conducteur soit présent pour qu’un véhicule puisse être conduit légalement sur une voie publique. Cependant, la plupart des réglementations et des cadres internationaux pertinents impliquent fortement la présence d’un conducteur dans le véhicule étant donné que « l’automatisation » n’était pas une considération au moment de la rédaction de la législation. [334]
Depuis avril 2022 [update], le ministère des Transports travaille sur un “programme de travail sur les véhicules autonomes” avec un “briefing d’informations à long terme (LTIB)” qui comprendra des questions de législation. [335]
Législation au Moyen-Orient
Israël
Israéliens un pays signataire de la Convention de Vienne. Depuis avril 2022 [update], l’Autorité israélienne de l’innovation (OCS) travaille à l’élaboration d’un cadre réglementaire pour les essais et l’utilisation de véhicules autonomes avec le ministère des Transports et de la Sécurité routière (MOT) et le ministère de la Justice . [336]
En mars 2022, la Knesset a adopté une loi qui permettra aux entreprises de piloter un transport partagé autonome avec des passagers dans le véhicule mais sans chauffeur de sécurité sur les routes israéliennes. La législation permet aux entreprises et aux exploitants de véhicules d’obtenir des licences spéciales du MOT et de mener des essais avec des voitures autonomes, y compris dans le but de transporter des passagers payants et lorsqu’un système de conduite indépendant remplace le conducteur. [337]
Responsabilité
La responsabilité des voitures autonomes est un domaine juridique et politique en développement qui déterminera qui est responsable lorsqu’une voiture automatisée cause des dommages physiques à des personnes ou enfreint les règles de la route. [1] [338] Lorsque les voitures automatisées transfèrent le contrôle de la conduite des humains à la technologie des voitures automatisées, le conducteur devra consentir à partager la responsabilité opérationnelle [339] , ce qui nécessitera un cadre juridique. Il peut être nécessaire que les lois existantes sur la responsabilité évoluent afin d’identifier équitablement les parties responsables des dommages et des blessures, et de traiter le potentiel de conflits d’intérêts entre les occupants humains, l’opérateur du système, les assureurs et les deniers publics. [340]
Lancement anticipé des voitures
Entre les véhicules à conduite manuelle (niveau SAE 0) et les véhicules entièrement autonomes (niveau SAE 5), il existe une variété de types de véhicules qui peuvent être décrits comme ayant un certain degré d’ automatisation . Ceux-ci sont collectivement connus sous le nom de véhicules semi-automatisés. Comme il pourrait s’écouler un certain temps avant que la technologie et l’infrastructure ne soient développées pour une automatisation complète, il est probable que les véhicules auront des niveaux d’automatisation croissants. Ces véhicules semi-automatisés pourraient potentiellement exploiter de nombreux avantages des véhicules entièrement automatisés, tout en gardant le conducteur responsable du véhicule. [341]
Niveau 2 anticipé
Les véhicules Tesla sont équipés de matériel qui, selon Tesla, permettra une conduite entièrement autonome à l’avenir. En octobre 2020, Tesla a publié une version « bêta » de son logiciel « Full Self-Driving » à un petit groupe de testeurs aux États-Unis ; [342] Or, ce « Full Self-Driving » correspond à une autonomie de niveau 2. [343]
Niveau 3 anticipé
En décembre 2021, Mercedes-Benz est devenu le deuxième constructeur à recevoir l’approbation légale pour un niveau 3. Leur homologation de type était sur le règlement 157 pour le maintien de voie automatisé, [249] et c’est le premier cas pour le type, comme l’homologation de type de Honda pour Traffic Jam Pilot était sur un type différent. [344] [345] Le système de conduite autonome Mercedes de niveau 3 s’appelle Drive Pilot et sera disponible sur la berline Mercedes-Benz Classe S et le fleuron électrique EQS au premier semestre 2022. [346] Ils s’attendent à déployer la conduite autonome de niveau 3 aux États-Unis en 2022. [347]
En 2017, BMW avait tenté de fabriquer la Série 7 en tant que voiture automatisée sur les autoroutes urbaines publiques des États-Unis, d’Allemagne et d’Israël avant de les commercialiser en 2021. [348] Bien que cela ne se soit pas réalisé, BMW prépare toujours la Série 7 à devenir le prochain fabricant à atteindre le niveau 3 au second semestre 2022. [349] [350]
Bien qu’Audi ait dévoilé une berline A8 avec une technologie de niveau 3 insistante en 2017, des obstacles réglementaires l’ont empêchée d’atteindre le niveau 3 en 2020. [351] [352]
En septembre 2021, Stellantis a présenté les résultats d’un programme pilote testant des véhicules autonomes de niveau 3 sur les autoroutes publiques italiennes. Le chauffeur routier de Stellantis revendique des capacités de niveau 3, qui ont été testées sur les prototypes Maserati Ghibli et Fiat 500X . [353] Stellantis va déployer la capacité de niveau 3 dans ses voitures en 2024. [354]
Depuis février 2022 [update], Hyundai Motor Company est en train d’améliorer la cybersécurité des voitures connectées pour mettre la Genesis G90 autonome de niveau 3 sur les routes coréennes cette année. [355]
Niveau 4 anticipé
En juillet 2020, Toyota a commencé à tester avec des manèges de démonstration publics sur le TRI-P4 basé sur Lexus LS (cinquième génération) avec une capacité de niveau 4. [356] En août 2021, Toyota a exploité un service potentiellement de niveau 4 en utilisant e-Palette autour du village olympique de Tokyo 2020 . [15]
En septembre 2021, Honda a lancé un programme de test en vue du lancement de l’activité de services de mobilité de niveau 4 au Japon en collaboration avec Cruise et General Motors , en utilisant Cruise AV. [357] En octobre 2021, lors du Congrès mondial sur les systèmes de transport intelligents , Honda a annoncé qu’elle testait déjà la technologie de niveau 4 sur le Legend Hybrid EX modifié. [358] À la fin du mois, Honda a expliqué qu’elle menait un projet de vérification sur la technologie de niveau 4 sur un parcours d’essai dans la préfecture de Tochigi . Honda prévoit de tester sur la voie publique au début de 2022. [359]
En février 2022, General Motors et Cruise ont demandé à la NHTSA l’autorisation de construire et de déployer un véhicule autonome, le Cruise Origin, qui est sans commandes humaines comme les volants ou les pédales de frein. La voiture a été développée avec GM et l’investisseur de croisière Honda, et sa production devrait commencer fin 2022 à Detroit à l’usine zéro de GM . [360] [361] Depuis avril 2022 [update], la requête est en instance. [362]
En avril 2022, Honda a dévoilé ses partenaires de services de mobilité de niveau 4 à déployer dans le centre de Tokyo au milieu des années 2020 en utilisant le Cruse Origin. [363]
Voir également
-
![]()
![]() Portail des voitures
Portail des voitures
- Transit de guidage automatisé
- Exploitation automatique des trains
- Sécurité automobile
- Système de navigation automobile
- Pilote automatique
- Systèmes avancés d’aide à la conduite
- Vision par ordinateur
- Voiture connectée
- Grand défi DARPA : 2004 , Grand défi DARPA , 2007
- Défi robotique DARPA (2012)
- Initiative néerlandaise sur les véhicules automatisés
- Mort par GPS
- Tracteur sans conducteur
- Navigation hybride
- Système de transport intelligent
- Liste des fournisseurs de systèmes de conduite autonome
- Vision industrielle
- Mobilité en tant que service (transport)
- Transport rapide personnel
- Peloton (automobile)
- Rénovation
- Caméra intelligente
- Chômage technologique
- Véhicule terrestre sans pilote
- Véhicule aérien sans pilote
- Intégration de l’infrastructure du véhicule
- Technologie de sécurité des véhicules
- Unité de traitement de la vision
- Mesure de la distance libre assurée devant vous
- Contrôle de stabilité éléctronique
- Système de précollision
- L’apprentissage en profondeur
- Intelligence artificielle
- Camion autonome
Références
- ^ un bcd Taeihagh , Araz ; Lim, Hazel Si Min (2 janvier 2019). “Gouverner les véhicules autonomes: réponses émergentes pour la sécurité, la responsabilité, la confidentialité, la cybersécurité et les risques de l’industrie”. Avis sur les transports . 39 (1): 103–128. arXiv : 1807.05720 . doi : 10.1080/01441647.2018.1494640 . ISSN 0144-1647 . S2CID 49862783 .
- ^ Maki, Sydney; Sage, Alexandrie (19 mars 2018). “Une voiture Uber autonome tue une femme de l’Arizona qui traverse la rue” . Reuters . Récupéré le 14 avril 2019 .
- ^ Thrun, Sébastien (2010). “Vers des voitures robotiques”. Communications de l’ACM . 53 (4): 99–106. doi : 10.1145/1721654.1721679 . S2CID 207177792 .
- ^ un b Hu, Junyan; et al (2020). “Contrôle coopératif de pelotons de véhicules connectés hétérogènes : une approche adaptative de suivi de leader” . Lettres IEEE sur la robotique et l’automatisation . 5 (2): 977–984. doi : 10.1109/LRA.2020.2966412 . S2CID 211055808 .
- ^ Gehrig, Stefan K.; En ligneStein, Fridtjof J. (1999). Navigation à l’estime et cartographie par stéréovision pour une voiture automatisée . Conférence internationale IEEE/RSJ sur les robots et systèmes intelligents. Vol. 3. Kyongju. pages 1507–1512. doi : 10.1109/IROS.1999.811692 . ISBN 0-7803-5184-3.
- ^ Hu, J.; Bhowmick, P.; Jang, je. ; Arvin, F.; Lanzon, A., ” Un cadre de confinement de formation de cluster décentralisé pour les systèmes multirobots ” IEEE Transactions on Robotics, 2021.
- ^ Lassa, Todd (janvier 2013). “Le début de la fin de la conduite” . Tendance moteur . Récupéré le 1er septembre 2014 .
- ^ “Systèmes intelligents de feuille de route européenne pour la conduite automatisée” (PDF) . EPoSS . 2015. Archivé de l’original (PDF) le 12 février 2015.
- ^ un bcd Lim , THazel Si Min; Taeihagh, Araz (2019). « Prise de décision algorithmique dans les véhicules audiovisuels : comprendre les préoccupations éthiques et techniques pour les villes intelligentes » . Durabilité . 11 (20) : 5791. arXiv : 1910.13122 . Bibcode : 2019arXiv191013122L . doi : 10.3390/su11205791 . S2CID 204951009 .
- ^ Path to Autonomy: Explication des niveaux de voiture autonomes 0 à 5 – Car and Driver, octobre 2017
- ^ un b SAE International (30 avril 2021). “Taxonomie et définitions des termes liés aux systèmes d’automatisation de la conduite pour les véhicules à moteur routiers (SAE J3016)” . Archivé de l’original le 20 décembre 2021 . Récupéré le 25 décembre 2021 .
- ^ un b “Honda pour Commencer les Ventes de Légende avec la Nouvelle Honda SENSING Elite” . Honda . 4 mars 2021 . Récupéré le 6 mars 2021 .
- ^ un b “Honda va commencer à vendre la 1ère voiture autonome de niveau 3 au monde pour 103 000 $ le vendredi” . Nouvelles de Kyodo . 4 mars 2021 . Récupéré le 6 mars 2021 .
- ^ un b Beresford, Colin (4 mars 2021). “Honda Legend Sedan avec autonomie de niveau 3 disponible à la location au Japon” . Voiture et chauffeur . Récupéré le 6 mars 2021 .
- ^ un b River Davis (2 août 2021). “Hyperdrive Daily: La navette sans conducteur aidant Toyota à remporter l’or” . Actualités Bloomberg . Récupéré le 7 novembre 2021 .
- ^ “Nuro est sur le point d’être le premier service de livraison sans conducteur de Californie” . Nouvelles de la BBC . 24 décembre 2020 . Récupéré le 27 décembre 2020 .
- ^ “La technologie de voiture autonome Mercedes-Benz approuvée pour une utilisation” . Nouvelles des pieds . 9 décembre 2021 . Récupéré le 10 décembre 2021 .
- ^ Viknesh Vijayenthiran (2 février 2022). “Cruise ouvre le service de taxi sans conducteur au public à San Francisco” . Autorité motrice . Récupéré le 27 mars 2022 .
- ^ “Cahier du journaliste: un tour dans un robotaxi AutoX sans conducteur” . 23 mars 2021 . Récupéré le 21 juin 2021 .
- ^ “Baidu déploie le premier service de taxi payant et sans conducteur de Chine” . Nouvelles de la flotte . 5 mai 2021 . Récupéré le 21 juin 2021 .
- ^ ” ‘Phantom Auto’ will tour city” . The Milwaukee Sentinel . 8 décembre 1926 . Récupéré le 23 juillet 2013 .
- ^ Vanderblit, Tom (6 février 2012). “Les voitures autonomes à travers les âges” . Câblé . Récupéré le 26 juillet 2018 .
- ^ Weber, Marc (8 mai 2014). “Où aller ? Une histoire des véhicules autonomes” . Musée d’histoire de l’informatique . Récupéré le 26 juillet 2018 .
- ^ “Carnegie Mellon” . Navlab : Le laboratoire de navigation de l’Université Carnegie Mellon . L’institut de robotique . Récupéré le 20 décembre 2014 .
- ^ Kanade, Takeo (février 1986). “Projet de véhicule terrestre autonome au CMU”. Actes de la quatorzième conférence annuelle de l’ACM de 1986 sur l’informatique – CSC ’86 . CSC ’86 Actes de la quatorzième conférence annuelle de l’ACM de 1986 sur l’informatique . SCC ’86. p. 71–80. doi : 10.1145/324634.325197 . ISBN 9780897911771. S2CID 2308303 .
- ^ Wallace, Richard (1985). “Premiers résultats en robot de suivi de route” (PDF) . JCAI’85 Actes de la 9e Conférence conjointe internationale sur l’intelligence artificielle . Archivé de l’original (PDF) le 6 août 2014.
- ^ a b Schmidhuber, Jürgen (2009). “Prof. Schmidhuber’s highlights of robot car history”. Retrieved 15 July 2011.
- ^ Turk, M.A.; Morgenthaler, D.G.; Gremban, K.D.; Marra, M. (May 1988). “VITS-a vision system for automated land vehicle navigation”. IEEE Transactions on Pattern Analysis and Machine Intelligence. 10 (3): 342–361. doi:10.1109/34.3899. ISSN 0162-8828.
- ^ University, Carnegie Mellon. “Look, Ma, No Hands-CMU News – Carnegie Mellon University”. cmu.edu. Retrieved 2 March 2017.
- ^ “Détails Navlab 5” . cs.cmu.edu . Récupéré le 2 mars 2017 .
- ^ Crowe, Steve (3 avril 2015). “Retour vers le futur : la conduite autonome en 1995 – Tendances robotiques” . roboticstrends.com . Récupéré le 2 mars 2017 .
- ^ “Journal de la NHAA” . cs.cmu.edu . Récupéré le 5 mars 2017 .
- ^ Conseil, Recherche nationale (2002). Développement technologique pour les véhicules terrestres sans pilote de l’armée . doi : 10.17226/10592 . ISBN 9780309086202.
- ^ Ackerman, Evan (25 janvier 2013). “Vidéo vendredi: Bosch et les voitures, les ROV et les baleines, et les bras et les tronçonneuses Kuka” . Spectre IEEE . Récupéré le 26 février 2013 .
- ^ “Audi of America / news / Pool / Mission réaffirmée pour Audi TTS Pikes Peak autonome” . AudiUSA.com. Archivé de l’original le 10 juillet 2012 . Récupéré le 28 avril 2012 .
- ^ “La voiture Nissan roule et se gare au Ceatec” . BBC. 4 octobre 2012 . Récupéré le 4 janvier 2013 .
- ^ “Toyota sneak previews self-drive car ahead of tech show”. BBC. 4 January 2013. Retrieved 4 January 2013.
- ^ Rosen, Rebecca (9 August 2012). “Google’s Self-Driving Cars: 300,000 Miles Logged, Not a Single Accident Under Computer Control”. The Atlantic. Retrieved 10 August 2012.
- ^ “Vislab, University of Parma, Italy – 8000 miles driverless test begins”. Archived from the original on 14 November 2013. Retrieved 27 October 2013.
- ^ “VisLab Intercontinental Autonomous Challenge: Inaugural Ceremony – Milan, Italy”. Retrieved 27 October 2013.
- ^ Selyukh, Alina (29 June 2016). “A 24-Year-Old Designed A Self-Driving Minibus; Maker Built It in Weeks”. NPR. Retrieved 21 July 2016.
- ^ Novak, Matt. “The National Automated Highway System That Almost Was”. Smithsonian. Retrieved 8 June 2018.
- ^ “Back to the Future: Autonomous Driving in 1995 – Robotics Business Review”. Robotics Business Review. 3 April 2015. Retrieved 8 June 2018.
- ^ “This Is Big: A Robo-Car Just Drove Across the Country”. WIRED. Retrieved 8 June 2018.
- ^ Ramsey, John (1 June 2015). “Self-driving cars to be tested on Virginia highways”. Richmond Times-Dispatch. Retrieved 4 June 2015.
- ^ Meyer, Gereon (2018). European Roadmaps, Programs, and Projects for Innovation in Connected and Automated Road Transport. In: G. Meyer, S. Beiker, Road Vehicle Automation 5. Springer 2018. doi:10.1007/978-3-319-94896-6_3. S2CID 169808153.
- ^ European Commission (2019). STRIA Roadmap Connected and Automated Transport: Road, Rail and Waterborne (PDF).
- ^ Hawkins, Andrew J. (7 November 2017). “Waymo is first to put fully self-driving cars on US roads without a safety driver”. theverge.com. Retrieved 7 November 2017.
- ^ “Early rider program – FAQ – Early Rider Program – Waymo”. Waymo. Retrieved 30 November 2018.
- ^ “Gauging investment in self-driving cars”. 16 October 2017. Retrieved 21 June 2021.
- ^ “On the Road – Waymo”. Waymo. Archived from the original on 23 March 2018. Retrieved 27 July 2018.
- ^ “Waymo launches nation’s first commercial self-driving taxi service in Arizona”. Washington Post. Retrieved 6 December 2018.
- ^ “Waymo’s Self-Driving Future Looks Real Now That the Hype Is Fading”. Bloomberg.com. 21 January 2021. Retrieved 5 March 2021.
- ^ a b Ackerman, Evan (4 March 2021). “What Full Autonomy Means for the Waymo Driver”. IEEE Spectrum: Technology, Engineering, and Science News. Retrieved 8 March 2021.
- ^ Hawkins, Andrew J. (8 October 2020). “Waymo will allow more people to ride in its fully driverless vehicles in Phoenix”. The Verge. Retrieved 5 March 2021.
- ^ “Robocar: Watch the world’s fastest autonomous car reach its record-breaking 282 km/h”. Guinness World Records. 17 October 2019. Retrieved 30 June 2020.
- ^ “Tesla Crash Investigation Yields 9 NTSB Safety Recommendations” (Press release). National Transportation Safety Board. 25 February 2020. Retrieved 28 July 2020.
- ^ “世界初! 自動運転車(レベル3)の型式指定を行いました” [The world’s first! approval of level-3 type designation for certification]. MLIT, Japan (in Japanese). 11 November 2020. Retrieved 6 March 2021.
- ^ Morris, David (8 November 2020). “What’s in a name? For Tesla’s Full Self Driving, it may be danger”. Fortune. Retrieved 8 March 2021.
- ^ Leggett, Theo (22 May 2018). “Who is to blame for ‘self-driving car’ deaths?”. BBC News – via BBC.
- ^ Boudette, Neal E. (23 March 2021). “Tesla’s Autopilot Technology Faces Fresh Scrutiny”. The New York Times. Archived from the original on 28 December 2021. Retrieved 15 June 2021.
- ^ Cellan-Jones, Rory (12 June 2018). “Insurers warning on ‘autonomous’ cars”. BBC News – via BBC.
- ^ Umar Zakir Abdul, Hamid; et al. (2021). “Adopting Aviation Safety Knowledge into the Discussions of Safe Implementation of Connected and Autonomous Road Vehicles”. SAE Technical Papers (SAE WCX Digital Summit) (2021–01–0074). Retrieved 12 April 2021.
- ^ SMMT publishes guiding principles for marketing automated vehicles, SMMT, 22 novembre 2021
- ^ a b Antsaklis, Panos J.; Passino, Kevin M.; Wang, S.J. (1991). “An Introduction to Autonomous Control Systems” (PDF). IEEE Control Systems Magazine. 11 (4): 5–13. CiteSeerX 10.1.1.840.976. doi:10.1109/37.88585. Archived from the original (PDF) on 16 May 2017. Retrieved 21 January 2019.
- ^ “Autonomous Emergency Braking – Euro NCAP”. euroncap.com.
- ^ a b c Regulation (EU) 2019/2144
- ^ HancocksMon, Simon; Oct 2020, 26. “The ABI and Thatcham warn against automated driving plans”. Visordown.{{cite web}}: CS1 maint: numeric names: authors list (link)
- ^ Automated and Electric Vehicles Act 2018
- ^ “Nissan’s Path to Self-Driving Cars? Humans in Call Centers”. Wired.
- ^ “self-driving car Definition from PC Magazine Encyclopedia”. pcmag.com.
- ^ “Self-Driving Cars Explained”. Union of Concerned Scientists.
- ^ “Automated and Electric Vehicles Act 2018 becomes law”. www.penningtonslaw.com. Retrieved 24 March 2021.
- ^ “Support – Autopilot”. Tesla. 13 February 2019. Archived from the original on 10 April 2019. Retrieved 6 September 2019.
- ^ Roberto Baldwin (9 March 2021). “Tesla Tells California DMV that FSD Is Not Capable of Autonomous Driving”. Car and Driver.
- ^ SAE International
- ^ “Federal Automated Vehicles Policy” (PDF). NHTSA, U.S. September 2016. p. 9. Retrieved 1 December 2021.
- ^ “JASO TP 18004: 自動車用運転自動化システムのレベル分類及び定義” [JASO TP 18004: Taxonomy and Definitions for Terms Related to Driving Automation Systems] (PDF). JASO, Japan. 1 February 2018. Retrieved 1 December 2021.
- ^ a b “Automated Driving – Levels of Driving Automation are Defined in New SAE International Standard J3016” (PDF). SAE International. 2014. Archived (PDF) from the original on 1 July 2018.
- ^ “SAE Self-Driving Levels 0 to 5 for Automation – What They Mean”. 23 January 2020.
- ^ Daily, Mike; Medasani, Swarup; Behringer, Reinhold; Trivedi, Mohan (December 2017). “Self-Driving Cars”. Computer. 50 (12): 18–23. doi:10.1109/MC.2017.4451204. ISSN 1558-0814.
- ^ “Traffic Jam Chauffeur: Autonomous driving in traffic jams”. 28 August 2016.
- ^ “BMW, Mercedes, Bosch welcome regulatory boost for ‘eyes-off’ self-driving tech”. 26 June 2020.
- ^ Stayton, E.; Stilgoe, J. (September 2020). “It’s Time to Rethink Levels of Automation for Self-Driving Vehicles [Opinion]”. IEEE Technology and Society Magazine. 39 (3): 13–19. doi:10.1109/MTS.2020.3012315. ISSN 1937-416X.
- ^ “Preparing the UK’s motorways for self-driving vehicles: New £1m research project announced in partnership with Highways England”. Loughborough University. Retrieved 13 April 2021.
- ^ Cavoli, Clemence; Phillips, Brian (2017). Tom Cohen. “Social and behavioural questions associated with Automated Vehicles A Literature Review” (PDF). UCL Transport Institute.
- ^ Parkin, John; Clark, Benjamin; Clayton, William; Ricci, Miriam; Parkhurst, Graham (27 October 2017). “Autonomous vehicle interactions in the urban street environment: a research agenda”. Proceedings of the Institution of Civil Engineers – Municipal Engineer. 171 (1): 15–25. doi:10.1680/jmuen.16.00062. ISSN 0965-0903.
- ^ Zhao, Jianfeng; Liang, Bodong; Chen, Qiuxia (2 January 2018). “The key technology toward the self-driving car”. International Journal of Intelligent Unmanned Systems. 6 (1): 2–20. doi:10.1108/IJIUS-08-2017-0008. ISSN 2049-6427.
- ^ Andrew J. Hawkins (9 December 2019). “Waymo’s driverless car: ghost-riding in the back seat of a robot”. The Verge. Retrieved 11 April 2022.
- ^ a b c “2020 Autonomous Vehicle Technology Report”. Wevolver. 20 February 2020. Retrieved 11 April 2022.
- ^ Durrant-Whyte, H.; Bailey, T. (5 June 2006). “Simultaneous localization and mapping”. IEEE Robotics & Automation Magazine. 13 (2): 99–110. CiteSeerX 10.1.1.135.9810. doi:10.1109/mra.2006.1638022. ISSN 1070-9932. S2CID 8061430.
- ^ Huval, Brody; Wang, Tao; Tandon, Sameep; Kiske, Jeff; Song, Will; Pazhayampallil, Joel (2015). “An Empirical Evaluation of Deep Learning on Highway Driving”. arXiv:1504.01716 [cs.RO].
- ^ Corke, Peter; Lobo, Jorge; Dias, Jorge (1 June 2007). “An Introduction to Inertial and Visual Sensing”. The International Journal of Robotics Research. 26 (6): 519–535. CiteSeerX 10.1.1.93.5523. doi:10.1177/0278364907079279. S2CID 206499861.
- ^ Hawkins, Andrew J. (13 May 2018). “MIT built a self-driving car that can navigate unmapped country roads”. theverge.com. Retrieved 14 May 2018.
- ^ Connor-Simons, Adam; Gordon, Rachel (7 May 2018). “Self-driving cars for country roads: Today’s automated vehicles require hand-labeled 3-D maps, but CSAIL’s MapLite system enables navigation with just GPS and sensors”. Retrieved 14 May 2018.
- ^ “How Self-Driving Cars Work”. 14 December 2017. Retrieved 18 April 2018.
- ^ Deepshikha Shukla (16 August 2019). “Design Considerations For Autonomous Vehicles”. Retrieved 18 April 2018.
- ^ Mike Beevor (11 April 2019). “Driving autonomous vehicles forward with intelligent infrastructure”. Smart Cities World. Retrieved 27 April 2022.
- ^ “Frequency of Target Crashes for IntelliDrive Safety Systems” (PDF). NHTSA. October 2010. Retrieved 27 April 2022.
- ^ “ISO/TC 204: Intelligent transport systems”. ISO. Retrieved 23 November 2021.
- ^ “Standards Collection”. connected automated driving.eu. Retrieved 23 November 2021.
- ^ Negroponte, Nicholas (1 January 2000). Being digital. Vintage Books. ISBN 978-0679762904. OCLC 68020226.
- ^ Adhikari, Richard (11 February 2016). “Feds Put AI in the Driver’s Seat”. Technewsworld. Retrieved 12 February 2016.
- ^ Nichols, Greg (13 February 2016). “NHTSA chief takes conservative view on autonomous vehicles: “If you had perfect, connected autonomous vehicles on the road tomorrow, it would still take 20 to 30 years to turn over the fleet.””. ZDNet. Retrieved 17 February 2016.
- ^ “New Allstate Survey Shows Americans Think They Are Great Drivers – Habits Tell a Different Story”. PR Newswire. 2 August 2011. Retrieved 7 September 2013.
- ^ Henn, Steve (31 July 2015). “Remembering When Driverless Elevators Drew Skepticism”. NPR.org. NPR. Retrieved 14 August 2016.
- ^ “Will Regulators Allow Self-Driving Cars in a Few Years?”. Forbes. 24 September 2013. Retrieved 5 January 2014.
- ^ Newton, Casey (18 November 2013). “Reliance on autopilot is now the biggest threat to flight safety, study says”. The Verge. Retrieved 19 November 2013.
- ^ Lin, Patrick (8 October 2013). “The Ethics of Autonomous Cars”. The Atlantic.
- ^ Skulmowski, Alexander; Bunge, Andreas; Kaspar, Kai; Pipa, Gordon (16 December 2014). “Forced-choice decision-making in modified trolley dilemma situations: a virtual reality and eye tracking study”. Frontiers in Behavioral Neuroscience. 8: 426. doi:10.3389/fnbeh.2014.00426. PMC 4267265. PMID 25565997.
- ^ a b Gomes, Lee (28 August 2014). “Hidden Obstacles for Google’s Self-Driving Cars”. MIT Technology Review. Retrieved 22 January 2015.
- ^ SingularityU The Netherlands (1 September 2016), Carlo van de Weijer on real intelligence, archived from the original on 30 October 2021, retrieved 21 November 2016
- ^ “Hackers find ways to hijack car computers and take control”. Financial Post. 3 September 2013. Retrieved 7 September 2013.
- ^ Ross, Philip E. (11 April 2014). “A Cloud-Connected Car Is a Hackable Car, Worries Microsoft”. IEEE Spectrum. Retrieved 23 April 2014.
- ^ Moore-Colyer, Roland (12 February 2015). “Driverless cars face cyber security, skills and safety challenges”. v3.co.uk. Retrieved 24 April 2015.
- ^ Petit, J.; Shladover, S.E. (1 April 2015). “Potential Cyberattacks on Automated Vehicles”. IEEE Transactions on Intelligent Transportation Systems. 16 (2): 546–556. doi:10.1109/TITS.2014.2342271. ISSN 1524-9050. S2CID 15605711.
- ^ a b Tussy, Ron (29 April 2016). “Challenges facing Autonomous Vehicle Development”. AutoSens. Retrieved 5 May 2016.
- ^ Zhou, Naaman (1 July 2017). “Volvo admits its self-driving cars are confused by kangaroos”. The Guardian. Retrieved 1 July 2017.
- ^ Garvin, Glenn (21 March 2014). “Automakers say self-driving cars are on the horizon”. Miami Herald. Retrieved 22 March 2014.
- ^ Badger, Emily (15 January 2015). “5 confounding questions that hold the key to the future of driverless cars”. The Washington Post. Retrieved 22 January 2015.
- ^ Hallerbach, S.; Xia, Y.; Eberle, U.; Koester, F. (2018). “Simulation-Based Identification of Critical Scenarios for Cooperative and Automated Vehicles”. SAE International Journal of Connected and Automated Vehicles. SAE International. 1 (2): 93–106. doi:10.4271/2018-01-1066.
- ^ Brodsky, Jessica (2016). “Autonomous Vehicle Regulation: How an Uncertain Legal Landscape May Hit the Brakes on Self-Driving Cars”. Berkeley Technology Law Journal. 31 (Annual Review 2016): 851–878. Retrieved 29 November 2017.
- ^ Stumpf, Rob. “Tesla Admits Current ‘Full Self-Driving Beta’ Will Always Be a Level 2 System: Emails”. The Drive. Retrieved 29 August 2021.
- ^ Keith Barry. “Senators Call for Investigation of Tesla’s Marketing Claims of Its Autopilot and ‘Full Self-Driving’ Features”. Consumer Reports. Retrieved 13 April 2020.
- ^ a b “メルセデス・ベンツ日本に措置命令 事実と異なる記載 消費者庁” [Administrative order to Mercedes-Benz Japan Co., Ltd. for the descriptions that are different from the fact – The Consumer Affairs Agency]. NHK, Japan (in Japanese). 10 December 2021. Retrieved 13 April 2022.
- ^ Steph Willems (28 July 2016). “Mercedes-Benz Slammed Over Misleading Commercial”. The Truth About Cars. Retrieved 15 April 2022.
- ^ Aaron Brown (29 July 2016). “Mercedes-Benz to Stop Running “Self-Driving Car” Ads”. The Drive. Retrieved 15 April 2022.
- ^ “Mercedes rejects claims about ‘misleading’ self-driving car ads”. Reuters. 25 April 2016. Retrieved 15 April 2022.
- ^ Silver, David (20 January 2018). “Limited talent pool is standing in the way of driverless cars”. The Next Web.
- ^ “DIY Robocars first year in review”.
- ^ Laursen, Lucas (28 August 2017). “The Tech That Won the First Formula Student Driverless Race”. IEEE Spectrum.
- ^ “udacity/self-driving-car”. GitHub. 31 December 2018.
- ^ “Berkeley Deep Drive”. bdd-data.berkeley.edu.
- ^ “Glossary – Level Five Jobs”. levelfivejobs.com. 27 July 2018.
- ^ James Andrew Lewis (28 June 2021). “National Security Implications of Leadership in Autonomous Vehicles”. CSIS. Retrieved 12 April 2022.
- ^ Allyson Chiu (11 July 2018). “Ex-Apple engineer arrested on his way to China, charged with stealing company’s autonomous car secrets”. The Washington Post. Retrieved 18 April 2022.
- ^ Sean O’Kane (30 January 2019). “A second Apple employee was charged with stealing self-driving car project secrets”. The Varge. Retrieved 18 April 2022.
- ^ “What’s big, orange and covered in LEDs? This start-up’s new approach to self-driving cars”. NBC News.
- ^ “Human Factors behind Autonomous Vehicles”. Robson Forensic. 25 April 2018. Retrieved 17 April 2022.
- ^ Gold, Christian; Körber, Moritz; Hohenberger, Christoph; Lechner, David; Bengler, Klaus (1 January 2015). “Trust in Automation – Before and After the Experience of Take-over Scenarios in a Highly Automated Vehicle”. Procedia Manufacturing. 3: 3025–3032. doi:10.1016/j.promfg.2015.07.847. ISSN 2351-9789.
- ^ “Survey Data Suggests Self-Driving Cars Could Be Slow To Gain Consumer Trust”. GM Authority. Retrieved 3 September 2018.
- ^ “Remembering When Driverless Elevators Drew Skepticism”. NPR.org.
- ^ “Episode 642: The Big Red Button”. NPR.org.
- ^ a b c d Narayanan, Santhanakrishnan; Chaniotakis, Emmanouil; Antoniou, Constantinos (1 February 2020). “Shared autonomous vehicle services: A comprehensive review”. Transportation Research Part C: Emerging Technologies. 111: 255–293. doi:10.1016/j.trc.2019.12.008. ISSN 0968-090X. S2CID 213859884.
- ^ a b Alexander Hevelke; Julian Nida-Rümelin. “Responsibility for Crashes of Autonomous Vehicles: An Ethical Analysis”. Sci Eng Ethics. 21. doi:10.1007/s11948-014-9565-5.
- ^ Pattinson, Jo-Ann; Chen, Haibo; Basu, Subhajit (2018). “Legal issues in automated vehicles: critically considering the potential role of consent and interactive digital interfaces”. Humanities and Social Sciences Communications. 7.
- ^ Gary E. Marchant; Rachel A. Lindor. “The Coming Collision Between Autonomous Vehicles and the Liability System”. Santa Clara Law Review. 52.
- ^ “The Trolley Problem”. The Yale Law Journal. 94 (6).
- ^ Himmelreich, Johannes (17 May 2018). “Never Mind the Trolley: The Ethics of Autonomous Vehicles in Mundane Situations”. Ethical Theory and Moral Practice. 21 (3): 669–684. doi:10.1007/s10677-018-9896-4. ISSN 1386-2820. S2CID 150184601.
- ^ a b Meyer, G.; Beiker, S (2014). Road vehicle automation. Springer International Publishing. pp. 93–102.
- ^ Karnouskos, Stamatis (2020). “Self-Driving Car Acceptance and the Role of Ethics”. IEEE Transactions on Engineering Management. 67 (2): 252–265. doi:10.1109/TEM.2018.2877307. ISSN 0018-9391. S2CID 115447875.
- ^ a b Edmond Awad; Sohan Dsouza; Richard Kim; Jonathan Schulz; Joseph Jenrich; Azim Shariff; Jean-François Bonnefon; Iyan Rahwan (2018). “The Moral Machine Experiment”. Nature. 563 (7729): 59–64. Bibcode:2018Natur.563…59A. doi:10.1038/s41586-018-0637-6. hdl:10871/39187. PMID 30356211. S2CID 53029241.
- ^ a b Hornigold, Thomas (31 October 2018). “Building a Moral Machine: Who Decides the Ethics of Self Driving Cars?”. Singularity Hub.
- ^ a b c d e f g Jean-François Bonnefon; Azim Shariff; Iyad Rahwan (2016). “The Social Dilemma of Autonomous Vehicles”. Science. 352 (6293): 1573–6. arXiv:1510.03346. Bibcode:2016Sci…352.1573B. doi:10.1126/science.aaf2654. PMID 27339987. S2CID 35400794.
- ^ Rawhwan, Iyad. “The Social Dilemma of Driverless Cars”. Youtube. TedXCambridge. Archived from the original on 30 October 2021.
- ^ a b Lim, Hazel Si Min; Taeihagh, Araz (2018). “Autonomous Vehicles for Smart and Sustainable Cities: An In-Depth Exploration of Privacy and Cybersecurity Implications”. Energies. 11 (5): 1062. arXiv:1804.10367. Bibcode:2018arXiv180410367L. doi:10.3390/en11051062. S2CID 13749987.
- ^ Lafrance, Adrienne (21 March 2016). “How Self-Driving Cars Will Threaten Privacy”. Retrieved 4 November 2016.
- ^ Jack, Boeglin (1 January 2015). “The Costs of Self-Driving Cars: Reconciling Freedom and Privacy with Tort Liability in Autonomous Vehicle Regulation”. Yale Journal of Law and Technology. 17 (1).
- ^ “Mcity testing center”. University of Michigan. 8 December 2016. Retrieved 13 February 2017.
- ^ “Adopted Regulations for Testing of Autonomous Vehicles by Manufacturers”. DMV. 18 June 2016. Retrieved 13 February 2017.
- ^ “The Pathway to Driverless Cars: A Code of Practice for testing”. 19 July 2015. Retrieved 8 April 2017.
- ^ “Automobile simulation example”. Cyberbotics. 18 June 2018. Retrieved 18 June 2018.
- ^ Hallerbach, Sven; Xia, Yiqun; Eberle, Ulrich; Koester, Frank (3 April 2018). “Simulation-based Identification of Critical Scenarios for Cooperative and Automated Vehicles”. Toolchain for simulation-based development and testing of Automated Driving. SAE World Congress 2018. SAE Technical Paper Series. Vol. 1. pp. 93–106. doi:10.4271/2018-01-1066. Retrieved 22 December 2018.
- ^ “Apply for an Autonomous Vehicle Technology Demonstration / Testing Permit”. 9 May 2017.
- ^ “Disengagement Reports”. California DMV. Retrieved 24 April 2022.
- ^ a b Brad Templeton (9 February 2021). “California Robocar Disengagement Reports Reveal Tidbits About Tesla, AutoX, Apple, Others”. Forbes. Retrieved 24 April 2022.
- ^ a b Wang, Brian (25 March 2018). “Uber’ self-driving system was still 400 times worse [than] Waymo in 2018 on key distance intervention metric”. NextBigFuture.com. Retrieved 25 March 2018.
- ^ “First self-driving race car completes 1.8 kilometre track”. euronews. 16 July 2018. Retrieved 17 July 2018.
- ^ California Department of Motor Vehicles. “The Self-Driving Car Companies Going The Distance”. Statista. Archived from the original on 25 February 2019. Retrieved 21 December 2019.
- ^ “California DMV releases autonomous vehicle disengagement reports for 2019”. VentureBeat. 26 February 2020. Retrieved 30 November 2020.
- ^ “(GRVA) New Assessment/Test Method for Automated Driving (NATM) – Master Document”. UNECE. 13 April 2021. Retrieved 23 April 2022.
- ^ “L3Pilot: Joint European effort boosts automated driving”. Connected Automated Driving. 15 October 2021. Retrieved 9 November 2021.
- ^ “From the Final Event Week: On Motorways”. L3Pilot. 13 October 2021. Retrieved 27 April 2022.
- ^ “L3Pilot Final Project Results published”. L3Pilot. 28 February 2022. Retrieved 27 April 2022.
- ^ Rita Liao (14 December 2021). “California suspends Pony.ai driverless test permit after crash”. TechCrunch. Retrieved 23 April 2022.
- ^ Rebecca Bellan (10 February 2022). “Despite a drop in how many companies are testing autonomous driving on California roads, miles driven are way up”. TechCrunch. Retrieved 25 April 2022.
- ^ Kassai, Evelyne (17 June 2020). “Scope of Using Autonomous Trucks and Lorries for Parcel Deliveries in Urban Settings”. Logistics. mdpi. 4 (3): 17. doi:10.3390/logistics4030017.
- ^ Metcalfe, John (5 October 2015). “China Rolls Out the ‘World’s First Driverless Bus”. Bloomberg.com. Bloomberg CityLab. Retrieved 25 July 2020.
- ^ Davies, Alex (7 October 2015). “China’s Self-Driving Bus Shows Autonomous Tech’s Real Potential”. Wired. Retrieved 25 July 2020.
- ^ “China’s first Level 4 self-driving shuttle enters volume production”. newatlas.com. 4 July 2018.
- ^ LLC, Baidu USA (4 July 2018). “Baidu Joins Forces with Softbank’s SB Drive, King Long to Bring Apollo-Powered Autonomous Buses to Japan”. GlobeNewswire News Room.
- ^ “Driverless cars take to the road”. E.U.CORDIS Research Program CitynetMobil. Retrieved 27 October 2013.
- ^ “Snyder OKs self-driving vehicles on Michigan’s roads”. Detroit News. 27 December 2013. Retrieved 1 January 2014.
- ^ “BBC News – UK to allow driverless cars on public roads in January”. BBC News. 30 July 2014. Retrieved 4 March 2015.
- ^ Burn-Callander, Rebecca (11 February 2015). “This is the Lutz pod, the UK’s first driverless car”. Daily Telegraph. Archived from the original on 11 February 2015. Retrieved 11 February 2015.
- ^ “Autonomous vehicle: the automated driving car of the future”. PSA PEUGEOT CITROËN. Archived from the original on 26 September 2015. Retrieved 2 October 2015.
- ^ Valeo Autonomous iAV Car Driving System CES 2015. YouTube. 5 January 2015. Archived from the original on 30 October 2021.
- ^ Hayward, Michael (26 January 2017). “First New Zealand autonomous vehicle demonstration kicks off at Christchurch Airport”. stuff.co.nz. Retrieved 23 March 2017.
- ^ “Self-driving car to take on Tauranga traffic this week”. Bay of Plenty Times. 15 November 2016. Retrieved 23 March 2017.
- ^ “NZ’s first self-drive vehicle demonstration begins”. stuff.co.nz. 17 November 2016. Retrieved 23 March 2017.
- ^ Frykberg, Eric (28 June 2016). “Driverless buses: ‘It is going to be big'”. Radio New Zealand. Retrieved 23 March 2017.
- ^ a b Kirsten Korosec (26 October 2021). “NTSB chair calls on Elon Musk to change design of Tesla Autopilot”. TechCrunch. Retrieved 12 November 2021.
- ^ “Tesla Fatalities Dataset”. datasetsearch.research.google.com. Retrieved 17 October 2020.
- ^ Horwitz, Josh; Timmons, Heather (20 September 2016). “There are some scary similarities between Tesla’s deadly crashes linked to Autopilot”. Quartz. Retrieved 19 March 2018.
- ^ “China’s first accidental death due to Tesla’s automatic driving: not hitting the front bumper”. China State Media (in Chinese). 14 September 2016. Retrieved 18 March 2018.
- ^ Felton, Ryan (27 February 2018). “Two Years On, A Father Is Still Fighting Tesla Over Autopilot And His Son’s Fatal Crash”. jalopnik.com. Retrieved 18 March 2018.
- ^ a b Yadron, Danny; Tynan, Dan (1 July 2016). “Tesla driver dies in first fatal crash while using autopilot mode”. The Guardian. San Francisco. Retrieved 1 July 2016.
- ^ a b Vlasic, Bill; Boudette, Neal E. (30 June 2016). “Self-Driving Tesla Involved in Fatal Crash”. The New York Times. Retrieved 1 July 2016.
- ^ Office of Defects Investigations, NHTSA (28 June 2016). “ODI Resume – Investigation: PE 16-007” (PDF). National Highway Traffic Safety Administration (NHTSA). Retrieved 2 July 2016.
- ^ Shepardson, David (12 July 2016). “NHTSA seeks answers on fatal Tesla Autopilot crash”. Automotive News. Retrieved 13 July 2016.
- ^ “A Tragic Loss” (Press release). Tesla Motors. 30 June 2016. Retrieved 1 July 2016. This is the first known fatality in just over 130 million miles where Autopilot was activated. Among all vehicles in the US, there is a fatality every 94 million miles. Worldwide, there is a fatality approximately every 60 million miles.
- ^ Abuelsamid, Sam. “Adding Some Statistical Perspective To Tesla Autopilot Safety Claims”. Forbes.
- ^ Administration, National Highway Traffic Safety. “FARS Encyclopedia”.
- ^ Levin, Alan; Plungis, Jeff (8 July 2016). “NTSB to scrutinize driver automation with probe of Tesla crash”. Automotive News. Retrieved 11 July 2016.
- ^ “Fatal Tesla Autopilot accident investigation ends with no recall ordered”. The Verge. 19 January 2016. Retrieved 19 January 2017.
- ^ Self-driving Car Logs More Miles, googleblog
- ^ A First Drive. YouTube. 27 May 2014. Archived from the original on 30 October 2021.
- ^ “Google Self-Driving Car Project, Monthly Report, March 2016” (PDF). Archived from the original (PDF) on 17 September 2016. Retrieved 23 March 2016.
- ^ “Waymo”. Waymo.
- ^ Davies, Alex (13 December 2016). “Meet the Blind Man Who Convinced Google Its Self-Driving Car Is Finally Ready”. Wired.
- ^ a b “For the first time, Google’s self-driving car takes some blame for a crash”. Washington Post. 29 February 2016.
- ^ “Google founder defends accident records of self-driving cars”. Los Angeles Times. Associated Press. 3 June 2015. Retrieved 1 July 2016.
- ^ Mathur, Vishal (17 July 2015). “Google Autonomous Car Experiences Another Crash”. Government Technology. Retrieved 18 July 2015.
- ^ “Google’s Self-Driving Car Caused Its First Crash”. Wired. February 2016.
- ^ “Passenger bus teaches Google robot car a lesson”. Los Angeles Times. 29 February 2016.
- ^ Bensinger, Greg; Higgins, Tim (22 March 2018). “Video Shows Moments Before Uber Robot Car Rammed into Pedestrian”. The Wall Street Journal. Retrieved 25 March 2018.
- ^ Lubben, Alex (19 March 2018). “Self-driving Uber killed a pedestrian as human safety driver watched”. Vice News. Retrieved 18 November 2021.
- ^ “Human Driver Could Have Avoided Fatal Uber Crash, Experts Say”. Bloomberg.com. 22 March 2018 – via www.bloomberg.com.
- ^ “Governor Ducey suspends Uber from automated vehicle testing”. KNXV-TV. Associated Press. 27 March 2018. Retrieved 27 March 2018.
- ^ Said, Carolyn (27 March 2018). “Uber puts the brakes on testing robot cars in California after Arizona fatality”. San Francisco Chronicle. Retrieved 8 April 2018.
- ^ “Preliminary Report Released for Crash Involving Pedestrian, Uber Technologies, Inc., Test Vehicle” (PDF). 24 May 2018.
- ^ “Uber’s self-driving operator charged over fatal crash”. BBC News. 16 September 2020.
- ^ Gibbs, Samuel (9 November 2017). “Self-driving bus involved in crash less than two hours after Las Vegas launch”. The Guardian. Retrieved 9 November 2017.
- ^ “Believing too much in the words “automatic driving”, the CEO of a Chinese startup company crashed into a construction vehicle in self-driving mode and died | T客邦”. News Directory 3. 20 August 2021. Retrieved 17 February 2022.
- ^ Rearick, Brenden; Aug 16, InvestorPlace Assistant News Writer; 2021; EST, 12:56 pm (16 August 2021). “NIO Stock: 10 Things to Know About the Fatal Crash Dragging Down Nio Today”. InvestorPlace. Retrieved 17 February 2022.{{cite web}}: CS1 maint: numeric names: authors list (link)
- ^ Ruffo, Gustavo Henrique (17 August 2021). “Nio’s Autopilot, NOP, Faces Intense Scrutiny With First Fatal Crash in China”. autoevolution. Retrieved 17 February 2022.
- ^ “Statement Regarding a Collision between a Pedestrian and a Toyota e-Palette Vehicle at the Tokyo 2020 Olympic and Paralympic Athletes’ Village”. ToyotaTimes. 27 August 2021. Retrieved 17 November 2021.
- ^ “Toyota self-driving buses in Paralympic village to restart on Aug. 31”. Kyodo News. 30 August 2021. Retrieved 17 November 2021.
- ^ “Consumers in US and UK Frustrated with Intelligent Devices That Frequently Crash or Freeze, New Accenture Survey Finds”. Accenture. 10 October 2011. Retrieved 30 June 2013.
- ^ Yvkoff, Liane (27 April 2012). “Many car buyers show interest in autonomous car tech”. CNET. Retrieved 30 June 2013.
- ^ “Große Akzeptanz für selbstfahrende Autos in Deutschland”. motorvision.de. 9 October 2012. Archived from the original on 15 May 2016. Retrieved 6 September 2013.
- ^ “Autonomous Cars Found Trustworthy in Global Study”. autosphere.ca. 22 May 2013. Retrieved 6 September 2013.
- ^ “Autonomous cars: Bring ’em on, drivers say in Insurance.com survey”. Insurance.com. 28 July 2014. Retrieved 29 July 2014.
- ^ “Autonomous Vehicle Predictions: Auto Experts Offer Insights on the Future of Self-Driving Cars”. PartCatalog.com. 16 March 2015. Retrieved 18 March 2015.
- ^a b Kyriakidis, M.; Happee, R.; De Winter, J. C. F. (2015). “Public opinion on automated driving: Results of an international questionnaire among 5,000 respondents”. Transportation Research Part F: Traffic Psychology and Behaviour. 32: 127–140. doi:10.1016/j.trf.2015.04.014.
- ^ Hohenberger, C.; Spörrle, M.; Welpe, I. M. (2016). “How and why do men and women differ in their willingness to use automated cars? The influence of emotions across different age groups”. Transportation Research Part A: Policy and Practice. 94: 374–385. doi:10.1016/j.tra.2016.09.022.
- ^ Hall-Geisler, Kristen (22 December 2016). “Autonomous cars seen as smarter than human drivers”. TechCrunch. Retrieved 26 December 2016.
- ^ Smith, Aaron; Anderson, Monica (4 October 2017). “Automation in Everyday Life”.
- ^ Hewitt, Charlie; Politis, Ioannis; Amanatidis, Theocharis; Sarkar, Advait (2019). “Assessing public perception of self-driving cars: the autonomous vehicle acceptance model”. Proceedings of the 24th International Conference on Intelligent User Interfaces. ACM Press: 518–527. doi:10.1145/3301275.3302268. S2CID 67773581.
- ^ “GAR – 1968 Vienna Convention”. 1 December 2017. Archived from the original on 1 December 2017.
- ^ “UNECE paves the way for automated driving by updating UN international convention”. UNECE. 26 March 2016. Retrieved 3 November 2021.
- ^ “Proposal of amendment to Article 1 and new Article 34 bis to the convention” (PDF). UNECE. 15 January 2021. Retrieved 6 April 2022.
- ^ “Acceptance of amendment to Article 1 and new Article 34 bis to the convention” (PDF). UNECE. 14 January 2022. Retrieved 6 April 2022.
- ^ “Working Party on Automated/Autonomous and Connected Vehicles – Introduction”. UNECE. Retrieved 5 November 2021.
- ^ “181st session, Geneva (online)” (PDF). UNECE. 24 June 2020. p. 8. Retrieved 5 November 2021.
- ^ Nick Bowyer (August 2020). “New UN ECE Regulations on Cyber Security and Software Updates Adopted”. InterRegs. Retrieved 6 November 2021.
- ^ “UN Regulation No. 155 – Cyber security and cyber security management system”. UNECE. 4 March 2021. Retrieved 20 March 2022.
- ^ “UN Regulation No. 156 – Software update and software update management system”. UNECE. 4 March 2021. Retrieved 20 March 2022.
- ^ un b “UN Regulation No. 157 – Automated Lane Keeping Systems (ALKS)”. UNECE. 5 March 2021. Retrieved 20 March 2022.
- ^ Imai, Takeyoshi (décembre 2019). “Réglementation juridique de la technologie de conduite autonome : conditions et problèmes actuels au Japon” . IATSS Research. 43 (4): 263–267. doi:10.1016/j.iatssr.2019.11.009.
- ^ “昭和三十五年法律第百五号 道路交通法 (令和二年法律第五十二号による改正)” [Road Traffic Act of 1960 no.105 (amended by 2019 act no.52)]. e-Gov Japan. Retrieved 10 March 2021.
- ^ “道路運送車両法(昭和二十六年法律第百八十五号)(令和元年法律第十四号による改正)” [Road Transport Vehicle Act of 1951 no.185 (amended by 2019 act no.14)]. e-Gov Japan. Retrieved 10 March 2021.
- ^ “About SIP 2nd Phase”. SIP-adus. Retrieved 10 March 2021.
- ^ “官民ITS構想・ロードマップ2020” [Initiative STI public-privé : Feuilles de route 2020] (PDF). Cabinet Secretariat, Japan (in Japanese). 15 July 2020. Retrieved 21 March 2021.
- ^ Junji Kikushima (novembre 2020). « Initiative STI public-privé : feuilles de route 2020 » (PDF). SIP-adus (in Japanese). Retrieved 6 April 2021.
- ^ “自動運転技術に関する国際基準等を導入します” [Introducing international regulations about autonomous driving technology]. MLIT, Japan (in Japanese). 25 December 2020. Retrieved 17 October 2021.
- ^ “道路運送車両の保安基準(昭和二十六年運輸省令第六十七号)(令和二年国土交通省令第百号による改正)” [Safety Regulation for Road Transport Vehicle, Ministry of Transport Ministerial ordinance 1951 no.67 (amended by MLIT Ministerial ordinance 2020 no.100)]. e-Gov Japan. Retrieved 17 October 2021.
- ^ “自動運転の実現に向けた調査研究報告書” [Rapport de recherche sur la réalisation de la conduite autonome] (PDF) . National Police Agency (in Japanese). 1 April 2021. Retrieved 2 April 2021.
- ^ “Le Japon à l’amendement de la loi Mull pour les services de mobilité sans pilote” . Jiji Press. 1 April 2021. Retrieved 2 April 2021.
- ^ “‘Level 4’ self-driving transit cars in Japan won’t require licensed passengers: expert panel”. Mainichi Shimbun. 2 April 2021. Retrieved 10 November 2021.
- ^ “「自動運転レベル4等先進モビリティサービス研究開発・社会実装プロジェクト(RoAD to the L4)」について” [About project “RoAD to the L4”: Covering R&D with social deployment to realize acceptable Level 4 mobility service]. METI, Japan (in Japanese). 27 September 2021. Retrieved 2 November 2021.
- ^ Shiho Takezawa (7 September 2021). “Japan steps up self-driving to revive rural areas and aid older population”. Japan Times. Retrieved 7 November 2021.
- ^ “不当景品類及び不当表示防止法(昭和三十七年法律第百三十四号)(令和元年法律第十六号による改正)” [Act against Unjustifiable Premiums and Misleading Representations of 1962 no.134 (amended by 2019 act no.16)]. e-Gov Japan. Retrieved 29 December 2021.
- ^ “メルセデス・ベンツ日本株式会社に対する景品表示法に基づく措置命令について” [Administrative order to Mercedes-Benz Japan Co., Ltd. based on Act against Unjustifiable Premiums and Misleading Representations]. Consumer Affairs Agency, Japan (in Japanese). 10 December 2021. Retrieved 29 December 2021.
- ^ “National Police Agency preparing for fully automated driving in limited areas”. The Japan Times. 23 December 2021. Retrieved 31 December 2021.
- ^ “Japan Govt OKs Bill for Level 4 Autonomous Mobility Services”. Jiji Press. 4 March 2022. Retrieved 6 March 2022.
- ^ “Japan’s traffic law revised to add rules for next-gen vehicles”. The Japan Times. 19 April 2022. Retrieved 19 April 2022.
- ^ Bryant Walker Smith (1 November 2012). “Automated Vehicles Are Probably Legal in The United States”. The Center for Internet and Society (CIS) at Stanford Law School. Retrieved 31 January 2013.
- ^ Canis, Bill (19 September 2017). Issues in Autonomous Vehicle Deployment (PDF). Washington, DC: Congressional Research Service. Retrieved 16 October 2017.
- ^ Bryant Walker Smith. “Automated Driving: Legislative and Regulatory Action”. The Center for Internet and Society (CIS) at Stanford Law School. Retrieved 31 January 2013.
- ^ Andrew J. Hawkins (11 February 2020). “We still can’t agree how to regulate self-driving cars”. The Verge. Retrieved 16 March 2022.
- ^ “White Paper: Autonomous Vehicles: Legal and Regulatory Developments in the United States” (pdf). Jones Day. July 2021. pp. 6–8. Retrieved 19 March 2022.
- ^ “Federal Automated Vehicles Policy”. Department of Transportation. 14 September 2016. Retrieved 20 October 2016.
- ^ Kang, Cecilia (19 September 2016). “Self-Driving Cars Gain Powerful Ally: The Government”. The New York Times. ISSN 0362-4331. Retrieved 28 September 2016.
- ^ “USDOT Automated Vehicles 2.0 Activities”. U.S. Department of Transportation. Retrieved 28 April 2021.
- ^ “Preparing for the Future of Transportation: Automated Vehicles 3.0”. U.S. Department of Transportation. Retrieved 28 April 2021.
- ^ “Ensuring American Leadership in Automated Vehicle Technologies: Automated Vehicles 4.0”. U.S. Department of Transportation. Retrieved 28 April 2021.
- ^ 85 FR 17624
- ^ 85 FR 78058
- ^ “NHTSA Issues First-Ever Proposal to Modernize Occupant Protection Safety Standards for Vehicles Without Manual Controls” (Press release). National Highway Traffic Safety Administration. 17 March 2020. Retrieved 28 April 2021.
- ^ “U.S. Department of Transportation Seeks Public Comment on Automated Driving System Safety Principles” (Press release). National Highway Traffic Safety Administration. 19 November 2020. Retrieved 28 April 2021.
- ^ “NHTSA Finalizes First Occupant Protection Safety Standards for Vehicles Without Driving Controls” (Press release). National Highway Traffic Safety Administration. 10 March 2022. Retrieved 11 March 2022.
- ^ Bellan, Rebecca (11 March 2022). “Buckle up, autonomous vehicles finally get federal safety standards”. TechCrunch. Retrieved 11 March 2022.
- ^ “Autonomous Vehicles”. GHSA. Retrieved 24 April 2022.
- ^ “Autonomous vehicle laws”. IIHS. Retrieved 24 April 2022.
- ^ “Nevada enacts law authorizing autonomous (driverless) vehicles”. Green Car Congress. 25 June 2011. Retrieved 25 June 2011.
- ^ Knapp, Alex (22 June 2011). “Nevada Passes Law Authorizing Driverless Cars”. Forbes. Archived from the original on 28 June 2011. Retrieved 25 June 2011.
- ^ Dobby, Christine (24 June 2011). “Nevada state law paves the way for driverless cars”. Financial Post. Retrieved 25 June 2011.
- ^ a b Markoff, John (10 May 2011). “Google Lobbies Nevada To Allow Self-Driving Cars”. The New York Times. Retrieved 11 May 2011.
- ^ “Bill AB511 Nevada Legislature” (PDF). Nevada Legislature. Retrieved 25 June 2011.
- ^ Healey, Tim (24 June 2011). “Nevada Passes Law Allowing Self-Driving Cars”. Motor Trend. Retrieved 25 June 2011.
- ^ Ryan, Cy (7 May 2012). “Nevada issues Google first license for self-driving car”. Las Vegas Sun. Retrieved 12 May 2012.
- ^ Valdes, Ana M. (5 July 2012). “Florida embraces self-driving cars, as engineers and lawmakers prepare for the new technology”. WPTV. Archived from the original on 12 April 2013.
- ^ Oram, John (27 September 2012). “Governor Brown Signs California Driverless Car Law at Google HQ”. Archived from the original on 30 September 2012.
- ^ “Bill Text – AB-2866 Autonomous vehicles”. leginfo.legislature.ca.gov. Retrieved 2 November 2019.
- ^ “Public Workshop Autonomous Vehicles” (PDF). 19 October 2016. Retrieved 20 September 2017.
- ^ Levin, Sam (15 December 2016). “Uber blames humans for self-driving car traffic offenses as California orders a halt”. The Guardian. Retrieved 15 December 2016.
- ^ “New Law Allows Driverless Cars on Michigan Roads”. CBS Detroit. 28 December 2013. Retrieved 2 November 2014.
- ^ Selle, Jeff (7 August 2014). “Aye, Robot: Cd’A City Council approves robot ordinance”. Coeur d’Alene Press.
- ^ a b “UK to road test driverless cars”. BBC. 16 July 2013. Retrieved 17 July 2013.
- ^ “Automated and Electric Vehicles Act 2018”. Legislation.gov.uk. Retrieved 20 March 2022.
- ^ “Convention on Road Traffic”. UN Treaty Collection. Retrieved 8 December 2021.
- ^ “Self-Driving Cars May Hit the UK Highways Later This Year, Concerns About Safety Raised”. 28 April 2021.
- ^ “”Self-driving” cars could be legalised on UK roads later this year”. 28 April 2021.
- ^ “‘Don’t believe the hype, self-driving cars are not coming this year'”.
- ^ “Automated Vehicles: Current project status”. Law Commission. Retrieved 29 January 2022.
- ^ “New regulations to govern driverless cars in the UK”. Mayer Brown. Retrieved 28 March 2022.
- ^ “Marketing automated vehicles”. SMMT, UK. 22 November 2021. Retrieved 30 December 2021.
- ^ “Britain moves closer to a self-driving revolution”. gov.uk. 20 April 2022. Retrieved 20 April 2022.
- ^ “Regulation (EU) 2019/2144 of the European Parliament and of the Council of 27 November 2019”. EUR-Lex. 16 December 2019. Retrieved 21 March 2022.
- ^ “Des véhicules autonomes sur route ouverte à Bordeaux en octobre 2015”. usine-digitale.fr.
- ^ a b “The French strategy for the development of automated road mobility”. Ministry of the Ecological Transition, France. 17 March 2022. Retrieved 21 March 2022.
- ^ “Mobility Orientation Law”. CARA. 9 June 2021. Retrieved 21 March 2022.
- ^ “Decree No. 2021-873 of 29 June 2021 implementing Ordinance No. 2021-443 of 14 April 2021 relating to the system of criminal liability applicable in the event of the circulation of a vehicle with driver delegation and its conditions of use”. Légifrance. Retrieved 15 April 2022.
- ^ “The French strategy for the development of automated road mobility 2020-2022” (PDF). Ministry of the Ecological Transition, France. 2022. Retrieved 13 April 2022.
- ^ “German Act Amending the Road Traffic Act and the Compulsory Insurance Act: Act on Autonomous Driving”. UNECE. 24 September 2021. Retrieved 21 March 2022.
- ^ Udo Steiniger (21 March 2022). “Part 12: The Autonomous Vehicles Approval and Operation Ordinance is on its way”. SafetyWissen. Retrieved 15 April 2022.
- ^ “Motor Vehicle Safety Act S.C. 1993, c. 16”. Justice Laws Website, Government of Canada. Retrieved 22 March 2022.
- ^ “Guidelines for testing automated driving systems in Canada”. Transport Canada. Retrieved 22 March 2022.
- ^ “1. Convention on Road Traffic: Geneva, 19 September 1949”. United Nations Treaty Collection. Retrieved 30 March 2022.
- ^ “19. Convention on Road Traffic: Vienna, 8 November 1968”. United Nations Treaty Collection. Retrieved 30 March 2022.
- ^ “China Issues Self-driving Car Road Testing Regulations”. 13 April 2018.
- ^ “China lays out self-driving rules in global race: China Daily”. Reuters. 13 April 2018.
- ^ King & Wood Mallesons (4 March 2020). “China Releases Big Plan for Autonomous Vehicles”. China Law Insight. Retrieved 2 April 2022.
- ^ Li Fusheng (20 April 2020). “China pushes forward with autonomous driving standards”. China Daily. Retrieved 2 April 2022.
- ^ “China Mulls Giving Green Light to Highway Self-Driving Car Tests – Caixin Global”.
- ^ King & Wood Mallesons (9 April 2021). “China’s Legislation on Autonomous Cars Rolls out”. China Law Insight. Retrieved 30 March 2022.
- ^ Mark Schaub; Atticus Zhao; Mark Fu (24 August 2021). “China MIIT formulating new rules on data security”. King & Wood Mallesons. Retrieved 23 April 2022.
- ^ “Why China’s New Data Security Law Is A Warning For The Future Of Data Governance”. Foreign Policy. 28 January 2022. Retrieved 20 April 2022.
- ^ Mark Schaub; Zhao Xinhua (23 February 2022). “China MIIT formulating new rules on data security”. King & Wood Mallesons. Retrieved 22 April 2022.
- ^ “Automated vehicle program”. NTC, Australia. Retrieved 19 March 2022.
- ^ “The regulatory framework for automated vehicles in Australia” (PDF). NTC, Australia. February 2022. Retrieved 15 April 2022.
- ^ “First supply and in-service automated vehicle law”. Department of Infrastructure, Transport, Regional Development and Communications, Australia. Retrieved 19 March 2022.
- ^ “Autonomous Vehicles Work Programme”. Ministry of Transport, New Zealand. Retrieved 15 March 2022.
- ^ “Long-term Insights Briefing: The impact of autonomous vehicles operating on New Zealand roads”. Ministry of Transport, New Zealand. 17 September 2021. Retrieved 15 March 2022.
- ^ “Forming Regulatory Framework for Trials and Use of Autonomous Vehicles in Israel”. Israel Innovation Authority. Retrieved 3 April 2022.
- ^ Ricky Ben-David (9 March 2022). “New legislation paves path for trial of driverless autonomous taxis in Israel”. The Times of Israel. Retrieved 4 March 2022.
- ^ Slone, Sean. “State Laws on Autonomous Vehicles”. Retrieved 11 December 2016.
- ^ Pattinson, Jo-Ann; Chen, Haibo; Basu, Subhajit (18 November 2020). “Legal issues in automated vehicles: critically considering the potential role of consent and interactive digital interfaces”. Humanities and Social Sciences Communications. 7 (1): 1–10. doi:10.1057/s41599-020-00644-2. ISSN 2662-9992. S2CID 227061202.
- ^ Anderson, James M.; Kalra, Nidhi; Stanley, Karlyn D.; Sorensen, Paul; Samaras, Constantine; Oluwatola, Oluwatobi A. (2016). “Autonomous Vehicle Technology: A Guide for Policymakers”. RAND Corporation. Retrieved 30 October 2016.
- ^ Hancock, P. A.; Nourbakhsh, Illah; Stewart, Jack (16 April 2019). “On the future of transportation in an era of automated and autonomous vehicles”. Proceedings of the National Academy of Sciences of the United States of America. 116 (16): 7684–7691. doi:10.1073/pnas.1805770115. ISSN 0027-8424. PMC 6475395. PMID 30642956.
- ^ Stoklosa, Alexander (22 October 2020). “Tesla Puts “Beta” Version of Full Self-Driving Capability In Hands of Select Few”. Motor Trend. Retrieved 25 October 2020.
- ^ Stumpf, Rob. “Tesla Admits Current ‘Full Self-Driving Beta’ Will Always Be a Level 2 System: Emails”. The Drive. Retrieved 29 August 2021.
- ^ Christopher Smith (10 December 2021). “Mercedes Gets International Approval For Level 3 Autonomous Tech”. Motor1.com. Retrieved 14 December 2021.
- ^ “Honda Receives Type Designation for Level 3 Automated Driving in Japan”. Honda. 11 November 2020. Retrieved 14 December 2021.
- ^ Jack Quick (23 March 2022). “Mercedes accepts legal liability for Level 3 Drive Pilot system”. Car Expert. Retrieved 10 April 2022.
- ^ “Mercedes hopes to roll out Level 3 self-driving in U.S. this year, CEO says”. Automotive News. 24 February 2022. Retrieved 28 March 2022.
- ^ Angel Sergeev (31 March 2017). “BMW Details Plan For Fully Automated Driving By 2021”. Motor1.com.
- ^ Michael Taylor; Carly Schaffner (4 November 2021). “BMW 7 Series To Reach Level 3 Autonomy Next Year”. Forbes Wheels. Retrieved 22 November 2021.
- ^ Nico DeMattia (5 November 2021). “2022 BMW 7 Series Will Get Level 3 Autonomous Driving Next Year”. BMWBLOG. Retrieved 22 November 2021.
- ^ “Why the 2019 Audi A8 won’t get Level 3 partial automation in the US”. Roadshow. 14 May 2018. Retrieved 5 March 2021.
- ^ Stephen Edelstein (28 April 2020). “Audi gives up on Level 3 autonomous driver-assist system in A8”. Motor Authority. Retrieved 26 November 2021.
- ^ Paul Myles (17 September 2021). “Stellantis Shows Off its Level 3 Technology”. Informa. Retrieved 29 November 2021.
- ^ Nick Gibbs (9 December 2021). “Stellantis will roll out Level 3 self-driving in 2024”. Automotive News. Retrieved 25 April 2022.
- ^ Seo Jin-woo; Jung You-jung; Lee Ha-yeon (16 February 2022). “Korean firms enhance car cybersecurity before Level 3 autonomous car releases”. Pulse by Maeil Business Newspaper. Retrieved 22 April 2022.
- ^ “Toyota to Offer Rides in SAE Level-4 Automated Vehicles on Public Roads in Japan Next Summer” (Press release). Toyota. 24 October 2019. Retrieved 17 March 2022.
- ^ “Honda to Start Testing Program in September Toward Launch of Autonomous Vehicle Mobility Service Business in Japan” (Press release). Honda. 8 September 2021. Retrieved 16 March 2022.
- ^ Martin Bigg (12 October 2021). “Honda Is Beating Tesla In Driverless Car Race”. CarBuzz. Retrieved 10 November 2021.
- ^ “Honda testing Level 4 autonomous driving technology”. NHK World. 30 October 2021. Retrieved 24 November 2021.
- ^ David Shepardson (19 February 2021). “GM seeks U.S approval to deploy self-driving vehicles”. Reuters. Retrieved 18 April 2022.
- ^ Jon Brodkin (22 February 2021). “GM seeks US approval to deploy self-driving car without a steering wheel”. Ars Technica. Retrieved 18 April 2022.
- ^ David Shepardson (26 April 2022). “U.S. Senate Democrats urge Buttigieg to develop autonomous vehicle rules”. Reuters. Retrieved 29 April 2022.
- ^ “Honda Signs Memorandum of Understanding with Teito Motor Transportation and kokusai motorcars as Part of Aim to Launch Autonomous Vehicle Mobility Service in Central Tokyo” (Press release). Honda. Retrieved 21 April 2022.
Further reading
![]() Media related to Self-driving car at Wikimedia Commons
Media related to Self-driving car at Wikimedia Commons
- O’Toole, Randal (18 January 2010). Gridlock: Why We’re Stuck in Traffic and What To Do About It. Cato Institute. ISBN 978-1-935308-24-9.
- Macdonald, Iain David Graham (2011). A Simulated Autonomous Car (PDF) (thesis). The University of Edinburgh. Retrieved 17 April 2013.
- Knight, Will (22 October 2013). “The Future of Self-driving Cars”. MIT Technology Review. Retrieved 22 July 2016.
- Taiebat, Morteza; Brown, Austin; Safford, Hannah; Qu, Shen; Xu, Ming (2019). “A Review on Energy, Environmental, and Sustainability Implications of Connected and Automated Vehicles”. Environmental Science & Technology. 52 (20): 11449–11465. arXiv:1901.10581. Bibcode:2019arXiv190110581T. doi:10.1021/acs.est.8b00127. PMID 30192527. S2CID 52174043.
- Glancy, Dorothy (2016). A Look at the Legal Environment for Driverless Vehicles (PDF) (Report). National Cooperative Highway Research Program Legal Research Digest. Vol. 69. Washington, DC: Transportation Research Board. ISBN 978-0-309-37501-6. Retrieved 22 July 2016.
- Newbold, Richard (17 June 2015). “The driving forces behind what would be the next revolution in the haulage sector”. The Loadstar. Retrieved 22 July 2016.
- Bergen, Mark (27 October 2015). “Meet the Companies Building Self-Driving Cars for Google and Tesla (And Maybe Apple)”. re/code.
- John A. Volpe National Transportation Systems Center (March 2016). “Review of Federal Motor Vehicle Safety Standards (FMVSS) for Automated Vehicles: Identifying potential barriers and challenges for the certification of automated vehicles using existing FMVSS” (PDF). National Transportation Library. US Department of Transportation.
- Slone, Sean (August 2016). “State Laws on Autonomous Vehicles” (PDF). Capitol Research – Transportation Policy. Council of State Governments. Retrieved 28 September 2016.
- Henn, Steve (31 July 2015). “Remembering When Driverless Elevators Drew Skepticism”.
- Anderson, James M.; et al. (2016). “Autonomous Vehicle Technology: A Guide for Policymakers” (PDF). RAND Corporation.
- Gereon Meyer, Sven Beiker (Eds.), Road Vehicle Automation, Springer International Publishing 2014, ISBN 978-3-319-05990-7, and following issues: Road Vehicle Automation 2 (2015), Road Vehicle Automation 3 (2016), Road Vehicle Automation 4 (2017), Road Vehicle Automation 5 (2018), Road Vehicle Automation 6 (2019). These books are based on presentations and discussions at the Automated Vehicles Symposium organized annually by TRB and AUVSI.
- Kemp, Roger (2018). « Véhicules autonomes – qui sera responsable des accidents ? . [15 Examen du droit relatif à la preuve numérique et à la signature électronique (2018) 33 – 47].