Rover (exploration spatiale)
Un rover (ou parfois un rover planétaire ) est un dispositif d’ exploration de surface planétaire conçu pour se déplacer sur la surface solide d’une planète ou d’autres Corps célestes de masse planétaire . Certains rovers ont été conçus comme des véhicules terrestres pour transporter les membres d’un équipage de vol spatial habité ; d’autres ont été des robots partiellement ou totalement autonomes . Les rovers sont généralement créés pour atterrir sur une autre planète (autre que la Terre ) via un vaisseau spatial de type atterrisseur , [1] chargé de collecter des informations sur le terrain et de prendre des échantillons de croûte tels que la poussière, le sol, les roches et même les liquides. Ce sont des outils essentiels dans l’exploration spatiale .
 Trois modèles différents de rover martien : Sojourner , MER et Curiosity
Trois modèles différents de rover martien : Sojourner , MER et Curiosity  Les roues de Curiosity sur Mars, 2017
Les roues de Curiosity sur Mars, 2017  Comparaison des distances parcourues par divers véhicules à roues à la surface de la Lune et de Mars
Comparaison des distances parcourues par divers véhicules à roues à la surface de la Lune et de Mars
Caractéristiques
Les rovers arrivent sur les engins spatiaux et sont utilisés dans des conditions très différentes de celles de la Terre, ce qui impose certaines exigences à leur conception.
Fiabilité
Les rovers doivent résister à des niveaux élevés d’accélération, à des températures élevées et basses, à la pression , à la poussière, à la corrosion , aux Rayons cosmiques , restant fonctionnels sans réparation pendant une période de temps nécessaire.
 Le rover martien Sojourner en configuration de croisière
Le rover martien Sojourner en configuration de croisière
Autonomie
Les rovers qui atterrissent sur des Corps célestes éloignés de la Terre, tels que les rovers d’exploration de Mars , ne peuvent pas être contrôlés à distance en temps réel car la vitesse à laquelle les signaux radio se propagent est beaucoup trop lente pour une communication en temps réel ou en temps quasi réel . Par exemple, envoyer un signal de Mars à la Terre prend entre 3 et 21 minutes. Ces rovers sont ainsi capables de fonctionner de manière autonome avec peu d’assistance du contrôle au sol en ce qui concerne la navigation et l’acquisition de données , bien qu’ils nécessitent toujours une intervention humaine pour identifier les cibles prometteuses à la distance à laquelle conduire et déterminer comment se positionner pour maximiser énergie solaire.[2] Donner à un rover des capacités d’identification visuelle rudimentaires pour faire des distinctions simples peut permettre aux ingénieurs d’accélérer la reconnaissance. [2] Au cours du défi du centenaire du robot de retour d’échantillons de la NASA, un rover, nommé Cataglyphis , a démontré avec succès des capacités de navigation, de prise de décision et de détection, de récupération et de retour d’échantillons autonomes. [3]
Approches sans roues
D’autres conceptions de rover qui n’utilisent pas d’approches à roues sont possibles. Des mécanismes qui utilisent la “marche” sur des jambes robotiques , des sauts, des roulades, etc. sont possibles. Par exemple, des chercheurs de l’Université de Stanford ont proposé “Hedgehog”, un petit rover en forme de cube qui peut sauter de manière contrôlée – ou même sortir d’un gouffre sablonneux en tirant vers le haut pour s’échapper – pour l’exploration en surface de Corps célestes à Faible gravité . [4]
Histoire
 Sites d’atterrissage des missions de retour d’échantillons et de rovers
Sites d’atterrissage des missions de retour d’échantillons et de rovers
Lunokhod 0 (n°201)
Le rover soviétique était censé être le premier robot télécommandé itinérant sur la Lune , mais s’est écrasé lors d’un démarrage raté du lanceur le 19 février 1969.
Lunokhod 1
 Le rover lunaire Lunokhod 1
Le rover lunaire Lunokhod 1
Le rover Lunokhod 1 a atterri sur la Lune en novembre 1970. [5] C’était le premier robot télécommandé itinérant à atterrir sur un corps céleste. L’ Union soviétique a lancé Lunokhod 1 à bord du vaisseau spatial Luna 17 le 10 novembre 1970, et il est entré en orbite lunaire le 15 novembre. Le vaisseau spatial a atterri en douceur dans la Mer des pluies .région le 17 novembre. L’atterrisseur avait des rampes doubles à partir desquelles Lunokhod 1 pouvait descendre vers la surface lunaire, ce qu’il a fait à 06h28 TU. Du 17 novembre 1970 au 22 novembre 1970, le rover a parcouru 197 m et, pendant 10 sessions de communication, a rendu 14 images rapprochées de la Lune et 12 vues panoramiques. Il a également analysé le sol lunaire. La dernière session de communication réussie avec Lunokhod 1 a eu lieu le 14 septembre 1971. Après avoir travaillé pendant 11 mois, [6] Lunokhod 1 a détenu le record de durabilité des rovers spatiaux pendant plus de 30 ans, jusqu’à ce qu’un nouveau record soit établi par les Mars Exploration Rovers . .
Véhicule itinérant lunaire Apollo
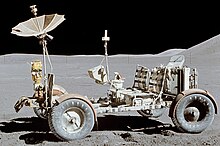 Véhicule itinérant lunaire Apollo 15
Véhicule itinérant lunaire Apollo 15
La NASA a inclus des Lunar Roving Vehicles dans trois missions Apollo : Apollo 15 (qui a atterri sur la Lune le 30 juillet 1971), Apollo 16 (qui a atterri le 21 avril 1972) et Apollo 17 (qui a atterri le 11 décembre 1972). [7]
Lunokhod 2
 Le rover lunaire Lunokhod 2
Le rover lunaire Lunokhod 2
Le Lunokhod 2 était le deuxième des deux rovers lunaires sans pilote posés sur la Lune par l’ Union soviétique dans le cadre du Programme Lunokhod . Le rover est devenu opérationnel sur la Lune le 16 janvier 1973. [8] C’était le deuxième robot télécommandé itinérant à atterrir sur n’importe quel corps céleste. L’ Union soviétique a lancé Lunokhod 2 à bord du vaisseau spatial Luna 21 le 8 janvier 1973, et le vaisseau spatial a atterri en douceur sur le bord est de la Mare Serenitatis.région le 15 janvier 1973. Lunokhod 2 est descendu des doubles rampes de l’atterrisseur sur la surface lunaire à 01h14 UT le 16 janvier 1973. Lunokhod 2 a fonctionné pendant environ quatre mois, a couvert 39 km (24 mi) de terrain, y compris vallonné les zones montagneuses et les rainures , et a renvoyé 86 images panoramiques et plus de 80 000 images TV. [9] [10] [11] Sur la base des rotations des roues, on pensait que Lunokhod 2 avait parcouru 37 km (23 mi), mais des scientifiques russes de l’Université d’État de géodésie et de cartographie de Moscou (MIIGAiK) ont révisé cela à une distance estimée d’environ 42,1 à 42,2 km (26,2 à 26,2 mi) d’après les images Lunar Reconnaissance Orbiter ( LRO ) de la surface lunaire. [12] [13]Des discussions ultérieures avec leurs homologues américains se sont terminées par une distance finale convenue de 39 km (24 mi), qui est restée bloquée depuis. [14] [15]
PrOP-M
Les atterrisseurs soviétiques Mars 2 et Mars 3 avaient chacun à bord un petit rover Mars de 4,5 kg, qui se serait déplacé sur la surface à skis tout en étant connecté à l’atterrisseur avec un ombilical de 15 mètres. Deux petites tiges métalliques ont été utilisées pour éviter les obstacles de manière autonome, car les signaux radio de la Terre auraient pris trop de temps pour piloter les rovers à l’aide de la télécommande. Le rover était prévu pour être posé en surface après atterrissage par un bras manipulateur et se déplacer dans le champ de vision des caméras de télévision et s’arrêter pour effectuer des mesures tous les 1,5 mètres. Les traces du rover dans le sol martien auraient également été enregistrées pour déterminer les propriétés des matériaux. En raison du crash de Mars 2 et de la panne de communication (15 secondes après l’atterrissage) de Mars 3, aucun rover n’a été déployé.
Lunokhod 3
Le rover soviétique était censé être le troisième robot télécommandé itinérant sur la Lune en 1977. La mission a été annulée en raison du manque de disponibilité et de financement du lanceur, bien que le rover ait été construit.
Marsokhod
Le Marsokhod était un rover soviétique (hybride, avec les deux commandes télécommande et automatique) visant Mars, faisant partie du Mars 4NM et prévu pour commencer après 1973 (selon les plans de 1970). Il devait être lancé par une Fusée N1 , qui n’a jamais volé avec succès. [16]
Séjourner
 Séjourner sur Mars
Séjourner sur Mars
La mission Mars Pathfinder comprenait Sojourner , le premier rover à se déployer avec succès sur une autre planète. La NASA , l’agence spatiale des États-Unis , a lancé Mars Pathfinder le 4 décembre 1996 ; il a atterri sur Mars dans une région appelée Chryse Planitia le 4 juillet 1997. [17] De son atterrissage jusqu’à la transmission finale des données le 27 septembre 1997, Mars Pathfinder a renvoyé 16 500 images de l’atterrisseur et 550 images de Sojourner , ainsi que des données de plus de 15 analyses chimiques de roches et de sols et de nombreuses données sur les vents et autres facteurs météorologiques. [17]
Outil de sous-surface planétaire Beagle 2
Beagle 2 a été conçu pour explorer Mars avec une petite “taupe” (Planetary Undersurface Tool, ou PLUTO), à déployer par le bras. PLUTO avait un mécanisme à ressort comprimé conçu pour lui permettre de se déplacer sur la surface à une vitesse de 20 mm par seconde et de s’enfouir dans le sol, collectant un échantillon souterrain dans une cavité à sa pointe. Beagle 2 a échoué en tentant d’atterrir sur Mars en 2003.
Mars Exploration Rover Esprit

Spirit est un rover robotique sur Mars , actif de 2004 à 2010. C’était l’un des deux rovers de la mission Mars Exploration Rover en cours de la NASA . Il a atterri avec succès sur Mars à 04h35 UTC le 4 janvier 2004, trois semaines avant que son jumeau, Opportunity (MER-B), n’atterrisse de l’autre côté de la planète. Son nom a été choisi dans le cadre d’un concours de rédaction d’étudiants parrainé par la NASA . Le rover est resté bloqué fin 2009 et sa dernière communication avec la Terre a été envoyée le 22 mars 2010.
Yutu Rover de Chang’e 3
Chang’e 3 est une mission lunaire chinoise qui comprend un rover lunaire robotique Yutu , nommé d’après le lapin de compagnie de Chang’e , la déesse de la Lune dans la mythologie chinoise. Lancé en 2013 avec la mission Chang’e 3 , c’est le premier rover lunaire chinois, le premier atterrissage en douceur sur la Lune depuis 1976 et le premier rover à y opérer depuis que le Lunokhod 2 soviétique a cessé ses activités le 11 mai 1973. [18] Il a été déployé sur la Lune le 14 décembre 2013, et le rover a rencontré des difficultés opérationnelles vers la fin du deuxième jour lunaire [19] après avoir survécu et récupéré avec succès la première nuit lunaire de 14 jours (environ un mois sur la Lune), [20] et n’a pas pu bouger après la fin de la deuxième nuit lunaire, bien qu’il ait continué à recueillir des informations utiles pendant quelques mois après. [21] En octobre 2015, Yutu a établi le record de la plus longue période opérationnelle pour un rover sur la Lune. [22] Le 31 juillet 2016, Yutu a cessé de fonctionner après un total de 31 mois, bien au-delà de sa durée de vie initialement prévue de trois mois. [23]
Opportunité d’ exploration de Mars
Opportunity est un rover robotique sur la planète Mars , actif de 2004 à début 2019. Lancé de la Terre le 7 juillet 2003, il a atterri sur le martien Meridiani Planum le 25 janvier 2004 à 05h05 UTC au sol (environ 13h15 heure locale ), trois semaines après que son jumeau Spirit (MER-A) se soit posé de l’autre côté de la planète. Le 28 juillet 2014, la NASA a annoncé qu’Opportunity , après avoir parcouru plus de 40 km (25 mi) sur la planète Mars , a établi un nouveau record “hors du monde” en tant que rover ayant parcouru la plus grande distance, dépassant le précédent record détenu par le rover Lunokhod 2 de l’Union soviétiquequi avait parcouru 39 km (24 mi). [24] [25] ( image associée )
Missions de rover actives
Emplacements actifs du rover martien en contexte

![]()
![]() ( voir • discuter ) Carte-image interactive de la topographie globale de Mars , superposée avec les emplacements des sites Mars Lander et Rover . Survolez l’image pour voir les noms de plus de 60 caractéristiques géographiques importantes et cliquez pour les lier. La coloration de la carte de base indique les élévations relatives , sur la base des données de l’ altimètre laser Mars Orbiter sur Mars Global Surveyor de la NASA . Les blancs et les bruns indiquent les altitudes les plus élevées ( +12 à +8 km ); suivi des roses et des rouges ( +8 à +3km ); le jaune est 0km ; les verts et les bleus sont des altitudes inférieures (jusqu’à −8km ). Les axes sont la latitude et la longitude ; Les régions polaires sont notées. (Voir aussi : carte de Mars ; carte / liste des monuments commémoratifs de Mars ) ( ROVER actif • Inactif • LANDER actif • Inactif • Futur )
( voir • discuter ) Carte-image interactive de la topographie globale de Mars , superposée avec les emplacements des sites Mars Lander et Rover . Survolez l’image pour voir les noms de plus de 60 caractéristiques géographiques importantes et cliquez pour les lier. La coloration de la carte de base indique les élévations relatives , sur la base des données de l’ altimètre laser Mars Orbiter sur Mars Global Surveyor de la NASA . Les blancs et les bruns indiquent les altitudes les plus élevées ( +12 à +8 km ); suivi des roses et des rouges ( +8 à +3km ); le jaune est 0km ; les verts et les bleus sont des altitudes inférieures (jusqu’à −8km ). Les axes sont la latitude et la longitude ; Les régions polaires sont notées. (Voir aussi : carte de Mars ; carte / liste des monuments commémoratifs de Mars ) ( ROVER actif • Inactif • LANDER actif • Inactif • Futur ) ![]()
![]() ← Beagle 2 (2003)
← Beagle 2 (2003) ![]()
![]() Curiosité (2012) →
Curiosité (2012) → ![]()
![]() Espace Profond 2 (1999) →
Espace Profond 2 (1999) → ![]()
![]() Aperçu (2018) →
Aperçu (2018) → ![]()
![]() 2 Mars (1971) →
2 Mars (1971) → ![]()
![]() ← 3 Mars (1971)
← 3 Mars (1971) ![]()
![]() 6 mars (1973) →
6 mars (1973) → ![]()
![]() Atterrisseur polaire (1999) ↓
Atterrisseur polaire (1999) ↓ ![]()
![]() ↑ Opportunité (2004)
↑ Opportunité (2004) ![]()
![]() ← Persévérance (2021)
← Persévérance (2021) ![]()
![]() ← Phénix (2008)
← Phénix (2008) ![]()
![]() Schiaparelli EDM (2016) →
Schiaparelli EDM (2016) → ![]()
![]() ← Séjourner (1997)
← Séjourner (1997) ![]()
![]() Esprit (2004) ↑ ↓ Zhurong (2021)
Esprit (2004) ↑ ↓ Zhurong (2021) ![]()
![]() Viking 1 (1976) →
Viking 1 (1976) → ![]()
![]() Viking 2 (1976) →
Viking 2 (1976) →
Mars Science Laboratory Rover Curiosity
 Le rover Curiosity du Mars Science Laboratory
Le rover Curiosity du Mars Science Laboratory
Le 26 novembre 2011, la mission Mars Science Laboratory de la NASA a été lancée avec succès pour Mars. La mission a réussi à faire atterrir le rover robotique Curiosity à la surface de Mars en août 2012. Le rover aide actuellement à déterminer si Mars aurait pu soutenir la vie et à rechercher des preuves de la vie passée ou présente sur Mars . [26] [27]
Yutu-2 (Rover Chang’e 4)
La mission chinoise lancée le 7 décembre 2018, a atterri et déployé le rover le 3 janvier 2019 sur la face cachée de la Lune . C’était le tout premier rover qui opère de l’autre côté de la Lune.
En décembre 2019, Yutu 2 a battu le record de longévité lunaire, précédemment détenu par le rover Lunokhod 1 de l’Union soviétique , [28] qui a opéré sur la surface lunaire pendant onze jours lunaires (321 jours terrestres) et a parcouru une distance totale de 10,54 km (6,55 mi). [29]
En février 2020, des astronomes chinois ont rapporté, pour la première fois, une image haute résolution d’une séquence d’éjectas lunaires , ainsi qu’une analyse directe de son architecture interne. Celles-ci étaient basées sur des observations faites par le Lunar Penetrating Radar (LPR) à bord du rover Yutu-2 tout en étudiant la face cachée de la Lune . [30] [31]
Mars 2020 Le rover Persévérance
 Mars 2020 Perseverance rover design infographie détaillant les caméras
Mars 2020 Perseverance rover design infographie détaillant les caméras
Le rover Persévérance de la mission Mars 2020 est un rover martien développé par la NASA qui a été lancé en 2020 et a atterri sur Mars le 18 février 2021. Il est destiné à étudier un ancien environnement astrobiologiquement pertinent sur Mars, à étudier ses processus géologiques de surface et son histoire. , y compris l’évaluation de son habitabilité passée et du potentiel de préservation des biosignatures dans les matériaux géologiques accessibles. [32]
Tianwen-1 Zhurong
Tianwen-1 , un projet CNSA , a été lancé le 23 juillet 2020 et a atteint avec succès l’orbite de Mars le 10 février 2021. Le rover Zhurong a atterri sur Mars le 14 mai 2021 et a été déployé depuis l’atterrisseur le 22 mai 2021. [33 ] Il conduira des missions scientifiques.
Missions de rover prévues
| Apprendre encore plus Cette rubrique doit être mise à jour . ( août 2018 )Veuillez aider à mettre à jour cet article pour refléter les événements récents ou les informations nouvellement disponibles. |
Chandrayan 3
Chandrayaan-3 est une mission proposée par l’Inde, composée d’un atterrisseur lunaire et d’un rover. Il s’agirait d’une nouvelle tentative de démonstration d’un atterrissage en douceur, suite à l’échec de l’atterrisseur Vikram de Chandrayaan – 2 .
ExoMars Rosalind Franklin
L’Agence spatiale européenne (ESA) a conçu et réalisé les premiers prototypes et essais du rover Rosalind Franklin . À partir de 2020 [mettre à jour], le lancement du rover est prévu fin 2022. [34]
Voir également
- Liste des rovers sur des corps extraterrestres
- Prix Google Lunar X
- Atterrisseur (vaisseau spatial)
- LORAX
- Rover lunaire
- Mars Rover ( avec équipage )
- Tank on the Moon , film documentaire de 2007
Références
| Wikimedia Commons a des médias liés aux Rovers (exploration spatiale) . |
- ^ “Explorer Les Planètes – Outils d’Exploration – Rovers” . Musée de l’Air et de l’Espace . 2002 . Récupéré le 3 janvier 2013 .
- ^ un b Michael Schirber (8 juillet 2012). “Les rovers du futur pourraient prendre des décisions par eux-mêmes” . Revue d’Astrobiologie . Réseau Mère Nature.
- ^ Salle, Loura (2016-09-08). “La NASA attribue 750 000 $ au défi du robot de retour d’échantillon” . Récupéré le 17/09/2016 .
- ^ Chipman, Ian (2016-02-08). “Rencontrez” Hedgehog ” : des ingénieurs construisent un rover en forme de cube pour l’exploration d’astéroïdes et de comètes” . Phys.org . Récupéré le 11/02/2016 .
- ^ “Lunar Lost & Found: La recherche d’anciens vaisseaux spatiaux” . www.space.com . Récupéré le 18/03/2009 .
- ^ “Luna 17 et Lunokhod 1” . www.zarya.info . Récupéré le 23/08/2009 .
- ^ “Expérience: Véhicule Lunar Rover” . Ares.jsc.nasa.gov. Archivé de l’original le 2009-03-20 . Récupéré le 18/03/2009 .
- ^ “Luna 21 et Lunokhod 2” . www.zarya.info . Récupéré le 23/08/2009 .
- ^ Andrew Chaikin (1er mars 2004). “Les autres alunissages” . Air et espace/Smithsonian . Archivé de l’original le 11 mai 2014 . Consulté le 25 mai 2013 .
- ^ Lewis Page (16 mars 2012). “Nouveau cliché de la NASA du chariot électrique du développeur de jeux TROUVÉ SUR LA LUNE : Sonde en passe-bas au-dessus du rover radioactif de Garriott” . Le Registre . Consulté le 25 mai 2013 .
- ^ “Lunokhod 2 revisité” . NASA. 13 mars 2012 . Consulté le 25 mai 2013 .
- ^ Lakdawalla, Emily (21 juin 2013). “Est-ce que Opportunity est proche du record de distance de Lunokhod ? Pas aussi proche que nous le pensions !” . La société planétaire . Consulté le 26 juin 2013 .
- ^ Witze, Alexandra (19 juin 2013). “Rovers spatiaux en course record” . Nature . Nouvelles naturelles. 498 (7454): 284–285. Bibcode : 2013Natur.498..284W . doi : 10.1038/498284a . PMID 23783609 .
- ^ Inc., Réseaux météorologiques Pelmorex. “Opportunity bat le record du monde de conduite !” . MétéoMédia .
- ^ “Traverser à travers la Lune” . lroc.sese.asu.edu .
- ^ Советский грунт с Марса Archivé le 8 avril 2010 à la Wayback Machine
- ^ un b “Mars Pathfinder” . NASA . Récupéré le 18/03/2009 .
- ^ Molnár, László (24 mai 2013). “Chang’e-3 révélé – et c’est énorme !” . Tirez sur les technologies spatiales .
- ^ “Le premier rover lunaire de Chine a connu une” anomalie de contrôle mécanique ” . Australian Broadcasting Corporation. 26 janvier 2014.
- ^ Boyle, Alan (12 janvier 2014). “L’atterrisseur lunaire et le rover chinois se réveillent après des semaines de sommeil” . Nouvelles NBC. Archivé de l’original le 14 janvier 2014.
- ^ McKirdy, Euan (13 février 2014). “A terre mais pas dehors : Jade Rabbit revient d’entre les morts” . CNN .
- ^ Jeff Foust (30 octobre 2015). “Le rover immobile de la Chine passe une étape purement figurative” . SpaceNews.
- ^ Un (29 octobre 2015). “Le premier rover lunaire chinois établit le record du plus long séjour” . Xinhua.
- ^ Webster, Guy; Brown, Dwayne (28 juillet 2014). “NASA Mars Opportunity Rover à longue durée de vie établit un record de conduite hors du monde” . NASA . Consulté le 29 juillet 2014 .
- ^ Knapp, Alex (29 juillet 2014). “Le Rover Opportunity de la NASA établit un record pour la conduite hors du monde” . Forbes . Consulté le 29 juillet 2014 .
- ^ Personnel de la NASA (26 novembre 2011). “Laboratoire scientifique de Mars” . NASA . Récupéré le 26/11/2011 .
- ^ “La NASA lance un rover super-taille sur Mars : ‘Allez, allez!’ ” . New York Times . Associated Press. 26 novembre 2011 . Récupéré le 26/11/2011 .
- ^ Le Farside Moon Rover chinois bat le record de longévité lunaire. Léonard David, Space.com . 12 décembre 2019.
- ^ Howell, Elizabeth (19 décembre 2016). ” Lunokhod 1 : 1er rover lunaire réussi” , Space.com. Consulté le 31 mai 2018.
- ^ Chang, Kenneth (26 février 2020). “Le rover chinois découvre des couches de surprise sous la face cachée de la Lune – La mission Chang’e-4, la première à atterrir sur la face cachée de la Lune, démontre la promesse et le danger de l’utilisation d’un radar à pénétration de sol dans la science planétaire” . Le New York Times . Récupéré le 27 février 2020 .
- ^ Li, Chunlai; et coll. (26 février 2020). “La structure souterraine peu profonde de la face cachée de la Lune dévoilée par le radar pénétrant lunaire Chang’E-4” . Les avancées scientifiques . 6 (9). doi : 10.1126/sciadv.aay6898 . Récupéré le 27 février 2020 .
- ^ Keith Cowing (21 décembre 2012). “Équipe de définition scientifique pour le Mars Rover 2020″ . NASA . Sciences Réf . Récupéré le 21 décembre 2012 .
- ^ Gebhardt, Chris (10 février 2021). “La Chine, avec Tianwen-1, commence son mandat sur Mars avec une arrivée orbitale réussie” .
- ^ “ExoMars décollera pour la planète rouge en 2022” .