Quatre roues motrices
Les quatre roues motrices , également appelées 4×4 (“quatre par quatre”) ou 4WD , désignent une transmission de véhicule à deux essieux capable de fournir du couple à toutes ses roues simultanément. Il peut être à temps plein ou à la demande, et est généralement lié via une boîte de transfert fournissant un arbre d’entraînement de sortie supplémentaire et, dans de nombreux cas, des gammes de vitesses supplémentaires .
 Le Jeep Wrangler (sur la photo est un TJ Wrangler ) est un véhicule à 4 roues motrices avec une boîte de transfert pour sélectionner une transmission intégrale à gamme basse ou haute.
Le Jeep Wrangler (sur la photo est un TJ Wrangler ) est un véhicule à 4 roues motrices avec une boîte de transfert pour sélectionner une transmission intégrale à gamme basse ou haute.
Un véhicule à quatre roues motrices dont le couple est fourni aux deux essieux est décrit comme “toutes roues motrices” (AWD). Cependant, «quatre roues motrices» fait généralement référence à un ensemble de composants et de fonctions spécifiques, et à une application hors route prévue, qui est généralement conforme à l’utilisation moderne de la terminologie.
Définitions
Les systèmes à quatre roues motrices ont été développés sur de nombreux marchés différents et utilisés dans de nombreuses plates- formes de véhicules différentes . Il n’existe pas d’ensemble terminologique universellement accepté décrivant les différentes architectures et fonctions. [1] Les termes utilisés par divers fabricants reflètent souvent des considérations de marketing plutôt que d’ingénierie ou des différences techniques importantes entre les systèmes. [2] [3] La norme J1952 de SAE International recommande uniquement le terme « traction intégrale » avec des sous-classifications supplémentaires qui couvrent tous les types de systèmes AWD/4WD/4×4 trouvés sur les véhicules de série. [4]
4×4
“Quatre par quatre” ou “4 × 4” est fréquemment utilisé pour désigner une classe de véhicules en général. Syntaxiquement, le premier chiffre indique le nombre total de roues (ou plus précisément : bouts d’essieux) et le second indique le nombre de bouts d’essieux moteurs. Ainsi, 4×2 désigne un véhicule à quatre roues qui ne transmet le couple moteur qu’à deux bouts d’essieux : les deux avant en traction avant ou les deux arrière en traction arrière . [5] De même, un 6×4véhicule a trois essieux, dont deux fournissent un couple à deux extrémités d’essieu chacun. Si ce véhicule était un camion avec des roues arrière jumelées sur deux essieux arrière, donc ayant en fait dix roues, sa configuration serait toujours formulée en 6×4. Pendant la Seconde Guerre mondiale, l’armée américaine utilisait généralement des espaces et un “X” majuscule – comme “4 X 2” ou “6 X 4”. [6]
 Boîte de transfert centrale transmettant la puissance de la transmission à l’essieu arrière (droit) et à l’essieu avant (gauche)
Boîte de transfert centrale transmettant la puissance de la transmission à l’essieu arrière (droit) et à l’essieu avant (gauche)
4×4
Les quatre roues motrices (4WD) font référence aux véhicules à deux essieux fournissant un couple aux quatre extrémités des essieux. Sur le marché nord-américain, le terme fait généralement référence à un système optimisé pour les conditions de conduite hors route. [7] Le terme “4WD” est généralement désigné pour les véhicules équipés d’une boîte de transfert qui bascule entre les modes de fonctionnement 2WD et 4WD, soit manuellement, soit automatiquement. [8]
traction intégrale
La transmission intégrale (AWD) était historiquement synonyme de «quatre roues motrices» sur les véhicules à quatre roues, et de six roues motrices sur les 6 × 6 , etc., étant utilisée de cette manière au moins dès les années 1920. [9] [10] Aujourd’hui en Amérique du Nord, le terme s’applique à la fois aux véhicules lourds et aux véhicules de tourisme légers. Lorsqu’il s’agit de véhicules lourds, le terme est de plus en plus appliqué pour signifier « traction multiple permanente » sur les systèmes de transmission 2 × 2 , 4 × 4, 6 × 6 ou 8 × 8 qui incluent un différentiel entre l’avant et l’arrière. arbres de transmission. [11]Ceci est souvent associé à une sorte de technologie antidérapante, de plus en plus hydraulique, qui permet aux différentiels de tourner à différentes vitesses, tout en étant capable de transférer le couple d’une roue avec une mauvaise traction à une autre avec une meilleure. Les systèmes AWD typiques fonctionnent bien sur toutes les surfaces, mais ne sont pas destinés à une utilisation hors route plus extrême. [11] Lorsqu’il est utilisé pour décrire les systèmes AWD dans les véhicules de tourisme légers, il fait référence à un système qui applique un couple aux quatre roues (en permanence ou à la demande) et/ou vise à améliorer la traction et les performances sur route (en particulier en cas d’intempéries). conditions), plutôt que pour les applications hors route. [7]
Certains véhicules électriques à traction intégrale utilisent un moteur pour chaque essieu, éliminant ainsi un différentiel mécanique entre les essieux avant et arrière. Un exemple en est la variante à deux moteurs de la Tesla Model S , qui contrôle électroniquement la répartition du couple entre ses deux moteurs. [12]
Pratiques recommandées par la SAE
Selon la norme internationale SAE J1952, AWD est le terme préféré pour tous les systèmes décrits ci-dessus. La norme subdivise les systèmes AWD en trois catégories. [4]
Les systèmes AWD à temps partiel nécessitent l’intervention du conducteur pour coupler et découpler l’essieu secondaire de l’essieu moteur principal, et ces systèmes n’ont pas de différentiel central (ou dispositif similaire). La définition note que les systèmes à temps partiel peuvent avoir une fourchette basse.
Les systèmes AWD permanents entraînent à tout moment les essieux avant et arrière via un différentiel central (interpont). La répartition du couple de ce différentiel peut être fixe ou variable selon le type de différentiel central. Ce système peut être utilisé sur n’importe quelle surface à n’importe quelle vitesse. La définition ne traite pas de l’inclusion ou de l’exclusion d’un rapport bas de gamme.
Les systèmes AWD à la demande entraînent l’essieu secondaire via un dispositif d’accouplement actif ou passif ou “par un système d’entraînement à alimentation indépendante”. La norme note que dans certains cas, le système d’entraînement secondaire peut également fournir la propulsion principale du véhicule. Un exemple est un véhicule hybride AWD où l’essieu primaire est entraîné par un moteur à combustion interne et l’essieu secondaire est entraîné par un moteur électrique. Lorsque le moteur à combustion interne est arrêté, l’essieu secondaire à entraînement électrique est le seul essieu moteur. Les systèmes à la demande fonctionnent principalement avec un seul essieu moteur jusqu’à ce que le couple soit requis par le deuxième essieu. À ce stade, un accouplement passif ou actif envoie un couple à l’essieu secondaire.
En plus des classifications primaires ci-dessus, la norme J1952 note des classifications secondaires résultant en un total de huit systèmes, désignés comme suit :
- Temps partiel non synchronisé
- Synchro à temps partiel
- Couple fixe permanent
- Passif à couple variable permanent
- Couple variable permanent actif
- Synchro passive à couple variable à la demande
- Couple variable synchro à la demande actif
- Couple variable alimenté indépendamment à la demande actif
Concevoir
Différentiels
 La Lamborghini Murciélago est une traction intégrale qui alimente l’avant via une unité de couplage visqueux si l’arrière patine
La Lamborghini Murciélago est une traction intégrale qui alimente l’avant via une unité de couplage visqueux si l’arrière patine 
 Pour éviter le patinage, certains véhicules sont équipés de commandes permettant de verrouiller indépendamment les différentiels centraux, avant et arrière.
Pour éviter le patinage, certains véhicules sont équipés de commandes permettant de verrouiller indépendamment les différentiels centraux, avant et arrière.
Limiter le glissement
De nombreux différentiels n’ont aucun moyen de limiter la quantité de puissance du moteur qui est envoyée à leurs arbres de sortie attachés. Par conséquent, si un pneu perd de la traction à l’accélération, soit en raison d’une situation de faible traction (par exemple, conduite sur du gravier ou de la glace) ou que la puissance du moteur dépasse la traction disponible, le pneu qui ne patine pas reçoit peu ou pas de puissance du moteur. moteur. Dans des situations de très faible traction, cela peut empêcher le véhicule de bouger du tout. Pour surmonter cela, plusieurs conceptions de différentiels peuvent soit limiter la quantité de glissement (ceux-ci sont appelés différentiels «à glissement limité») ou verrouiller temporairement les deux arbres de sortie ensemble pour garantir que la puissance du moteur atteint toutes les roues motrices de manière égale.
Les différentiels à blocage fonctionnent en bloquant temporairement ensemble les arbres de sortie d’un différentiel, ce qui fait tourner toutes les roues à la même vitesse, fournissant un couple en cas de patinage. Ceci est généralement utilisé pour le différentiel central, qui répartit la puissance entre les essieux avant et arrière. Alors qu’une transmission qui fait tourner toutes les roues de manière égale combattrait normalement le conducteur et causerait des problèmes de maniabilité, ce n’est pas un problème lorsque les roues patinent.
Les deux différentiels de verrouillage installés en usine les plus courants utilisent soit un embrayage multidisque contrôlé par ordinateur, soit une unité d’ accouplement visqueux pour joindre les arbres, tandis que d’autres différentiels sont plus couramment utilisés sur les véhicules tout-terrain utilisent généralement des dispositifs de verrouillage à commande manuelle. Dans l’embrayage multidisque, l’ordinateur du véhicule détecte le patinage et verrouille les arbres, provoquant une petite secousse lorsqu’il s’active, ce qui peut déranger le conducteur ou entraîner une perte de traction supplémentaire. Dans les différentiels à couplage visqueux, la contrainte de cisaillement des différences de vitesse d’arbre élevées provoque la solidification d’un fluide dilatant dans le différentiel, reliant les deux arbres. Cette conception souffre d’une dégradation des fluides avec l’âge et d’ unecomportement de verrouillage. [ citation nécessaire ] Certaines conceptions utilisent des engrenages pour créer une petite différence de rotation qui accélère le transfert de couple.
Une troisième approche pour limiter le glissement est prise par un différentiel Torsen , qui permet aux arbres de sortie de recevoir différentes quantités de couple. Cette conception ne fournit pas de traction lorsqu’une roue tourne librement, où aucun couple n’existe, mais offre une excellente maniabilité dans des situations moins extrêmes. [ citation nécessaire ] Un différentiel Torsen II typique peut fournir jusqu’à deux fois plus de couple du côté à haute traction avant que la traction ne soit dépassée du côté à faible traction.
Une innovation assez récente dans les automobiles est le contrôle de traction électronique. Il utilise généralement le système de freinage d’un véhicule pour ralentir une roue qui patine. Ce ralentissement forcé émule la fonction d’un différentiel à glissement limité et, en utilisant les freins de manière plus agressive pour s’assurer que les roues sont entraînées à la même vitesse, peut également émuler un différentiel à blocage. Cette technique nécessite normalement des capteurs de roue pour détecter le patinage d’une roue et ne s’active que lorsque le patinage de la roue est détecté. Par conséquent, il n’existe généralement aucun mécanisme pour empêcher activement le patinage des roues (c’est-à-dire qu’il n’est pas possible de verrouiller le différentiel avant le patinage des roues); au contraire, le système est conçu pour permettre expressément le patinage des roues, puis pour tenter d’envoyer un couple aux roues avec la meilleure traction. Si la prévention du patinage des roues est une exigence, il s’agit d’une conception limitative.
![]()
![]() Levier de sélection: 2H pour deux roues motrices, 4H pour 4WD haut de gamme, 4L pour 4WD bas de gamme et N pour neutre
Levier de sélection: 2H pour deux roues motrices, 4H pour 4WD haut de gamme, 4L pour 4WD bas de gamme et N pour neutre  Levier de sélection : 4×4 permanent, neutre et 4×4 bas de gamme à temps partiel
Levier de sélection : 4×4 permanent, neutre et 4×4 bas de gamme à temps partiel
Modes de fonctionnement
L’architecture d’un système AWD/4WD peut être décrite en montrant ses modes de fonctionnement possibles. [1] Un seul véhicule peut avoir la capacité de fonctionner dans plusieurs modes en fonction de la sélection du conducteur. Les différents modes sont :
- Mode deux roues motrices – Dans ce mode, un seul essieu (généralement l’essieu arrière) est entraîné. L’entraînement de l’autre essieu est déconnecté. Le rapport de répartition du couple de fonctionnement est de 0:100.
- Mode quatre roues motrices – Ici, selon la nature du transfert de couple aux essieux, trois sous-modes (ci-dessous) peuvent être définis.
- Mode temps partiel – Les essieux avant et arrière sont couplés de manière rigide dans la boîte de transfert. Étant donné que la transmission ne permet aucune différenciation de vitesse entre les essieux et entraînerait un enroulement de la transmission, ce mode est recommandé uniquement pour une utilisation à temps partiel dans des conditions hors route ou sur surface meuble où l’enroulement de la transmission est peu probable. Jusqu’au couple maximal pourrait aller à l’un ou l’autre des essieux, selon les conditions de la route et le poids sur les essieux.
- Mode temps plein – Les deux essieux sont entraînés en permanence, mais un différentiel interponts permet aux essieux de tourner à des vitesses différentes selon les besoins. Cela permet au véhicule d’être conduit à plein temps dans ce mode, quelle que soit la surface de la route, sans crainte d’enroulement de la transmission. Avec les différentiels à engrenages coniques standard, la répartition du couple est de 50:50. Les différentiels planétaires peuvent fournir des répartitions de couple asymétriques selon les besoins. Un système qui fonctionne en permanence en mode plein temps est parfois appelé tout le temps 4WD, transmission intégrale ou AWD. Si le différentiel interponts est verrouillé, le mode revient à un mode à temps partiel.
- Mode à la demande – Dans ce mode, la boîte de transfert fonctionne principalement en mode 2WD. Le couple est transféré à l’essieu secondaire selon les besoins en modulant l’embrayage de transfert d’un état ouvert à un état couplé rigide, tout en évitant tout enroulement de la transmission. La modulation de couple peut être réalisée par des systèmes de contrôle électroniques/hydrauliques actifs, ou par des dispositifs passifs, basés sur le patinage des roues ou le couple des roues, comme décrit dans la section sur les systèmes de contrôle de la traction.
En plus de ces modes de base, certaines implémentations peuvent combiner ces modes. Le système pourrait avoir un embrayage sur le différentiel central, par exemple, capable de moduler le couple de l’essieu avant d’un mode à temps plein avec la répartition du couple 30:70 du différentiel central à la répartition du couple 0:100 du mode 2WD.
Histoire
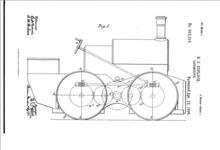 La locomotive à vapeur Diplock de 1893 a été le premier véhicule terrestre à 4 roues motrices au monde.
La locomotive à vapeur Diplock de 1893 a été le premier véhicule terrestre à 4 roues motrices au monde.  La Lohner-Porsche Mixte Hybrid était à la fois le premier véhicule hybride au monde et le premier véhicule à quatre roues motrices sans moteur à vapeur.
La Lohner-Porsche Mixte Hybrid était à la fois le premier véhicule hybride au monde et le premier véhicule à quatre roues motrices sans moteur à vapeur.
Fin des années 1800
En 1893, avant l’établissement de l’industrie automobile moderne en Grande-Bretagne, l’ingénieur anglais Bramah Joseph Diplock a breveté un système à quatre roues motrices [13] pour un moteur de traction à vapeur , comprenant quatre roues directrices et trois différentiels , qui a ensuite été construit. . Le développement a également incorporé le système de roues Pedrail de Bramah dans ce qui était l’une des premières automobiles à quatre roues motrices à afficher une capacité intentionnelle à se déplacer sur des surfaces routières difficiles. Cela découlait de l’idée précédente de Bramagh de développer un moteur qui réduirait la quantité de dommages aux routes publiques.
Ferdinand Porsche a conçu et construit un véhicule électrique à quatre roues motrices pour la kuk Hofwagenfabrik Ludwig Lohner & Co. à Vienne en 1899, présenté au public lors de l’Exposition universelle de 1900 à Paris. Le véhicule était une voiture Hybride de série qui utilisait un Moteur de moyeu électrique à chaque roue, alimenté par des batteries, qui étaient à leur tour chargées par un générateur à moteur à essence. [14] [15] Il était maladroitement lourd, et en raison de son statut inhabituel, le soi-disant Lohner-Porsche n’est pas souvent reconnu comme la première automobile à quatre roues motrices.
1900-1920
 Le Spyker 60-HP de 1903 était le premier 4 roues motrices au monde directement propulsé par un moteur à combustion interne et la première voiture de course 4 roues motrices.
Le Spyker 60-HP de 1903 était le premier 4 roues motrices au monde directement propulsé par un moteur à combustion interne et la première voiture de course 4 roues motrices.  Les quads Jeffery / Nash ont été les premiers véhicules 4 roues motrices produits en nombre à cinq chiffres (1913-1928).
Les quads Jeffery / Nash ont été les premiers véhicules 4 roues motrices produits en nombre à cinq chiffres (1913-1928).
La première voiture à quatre roues motrices au monde directement propulsée par un moteur à combustion interne, et la première avec un moteur avant à quatre roues motrices , était la néerlandaise Spyker 60 HP, commandée pour la course Paris-Madrid de 1903 , il a été présenté cette année-là par les frères Jacobus et Hendrik-Jan Spijker d’ Amsterdam . [16] [17] La voiture de sport à deux places comportait une transmission intégrale permanente et était également la première voiture équipée d’un moteur à six cylindres, ainsi que d’un freinage aux quatre roues. Plus tard utilisé comme coureur de côte, il est maintenant exposé au musée Louwman (l’ancien musée Nationaal Automobiel) à La Haye , aux Pays-Bas. [18]
Les conceptions pour les quatre roues motrices en Amérique sont d’abord venues de la Twyford Motor Car Company .
Le Reynolds-Alberta Museum possède un véhicule à quatre roues motrices, nommé ” Michigan “, de 1905 dans un entrepôt non restauré.
Les premiers véhicules à quatre roues motrices à entrer en production de masse ont été construits par (ce qui est devenu) l’American Four Wheel Drive Auto Company (FWD) du Wisconsin , fondée en 1908. [19] (à ne pas confondre avec le terme “FWD ” comme acronyme pour traction avant )
Avec le Nash Quad de 1 1 ⁄ 2 et 2 tonnes (voir ci-dessous), le modèle B de 3 tonnes à traction avant est devenu un camion militaire standard à quatre roues motrices pour les États-Unis. L’armée pendant la Première Guerre mondiale. Quelque 16 000 camions FWD modèle B ont été construits pour les Britanniqueset les armées américaines pendant la Première Guerre mondiale – environ la moitié par FWD et le reste par d’autres fabricants sous licence. Seuls environ 20 % des camions construits étaient des 4×4, mais les 4×4 étaient plus souvent en première ligne. [20] [21]
Environ 11 500 camions Jeffery / Nash Quad ont été construits pour un usage similaire entre 1913 et 1919. Le Quad était non seulement équipé de quatre roues motrices et de freins à quatre roues, mais également d’une Direction à quatre roues. [21] Le Quad a été l’un des premiers véhicules à quatre roues motrices à avoir jamais été fabriqué, et sa production s’est poursuivie pendant 15 ans avec un total de 41 674 unités fabriquées en 1928. [22]
Daimler-Benz a également une histoire dans le domaine des quatre roues motrices. Après que la Daimler Motoren Gesellschaft eut construit en 1907 un véhicule à quatre roues motrices appelé Dernburg-Wagen , également équipé d’une Direction à quatre roues motrices , qui fut utilisé par le fonctionnaire colonial allemand Bernhard Dernburg en Namibie ; Mercedes et BMW, en 1926, ont introduit des transmissions intégrales plutôt sophistiquées, les G1, G4 et G4 suivantes. Mercedes et BMW l’ont développé plus avant en 1937.
années 1930
 La voiture de reconnaissance Kurogane Type 95 de 1936 à 1944 (Japon)
La voiture de reconnaissance Kurogane Type 95 de 1936 à 1944 (Japon)  Le phaéton à quatre roues motrices GAZ-61 1938-1945 (Russie)
Le phaéton à quatre roues motrices GAZ-61 1938-1945 (Russie)  1940 GAZ-64 voiture de type jeep (Russie)
1940 GAZ-64 voiture de type jeep (Russie)
La société américaine Marmon-Herrington a été fondée en 1931 pour desservir un marché en pleine croissance de véhicules à quatre roues motrices à prix modéré. Marmon-Herrington s’est spécialisé dans la conversion de camions Ford en quatre roues motrices et a démarré avec succès en obtenant des contrats pour des camions de ravitaillement d’avions militaires et commerciaux, des châssis 4 × 4 pour le remorquage d’armes légères et une commande de l’Iraqi Pipeline Company pour quoi étaient les plus gros camions construits à l’époque. [23]
Les premiers Marmon-Herringtons se sont avérés être l’exception à la règle – les voitures et camions 4×4 développés dans les années 1930 étaient principalement construits pour les gouvernements, avec des applications de guerre (futures) à l’esprit.
Dodge a développé son premier camion à quatre roues motrices en 1934 – un militaire de 11⁄2 tonne désigné K-39-X-4 (USA), dont 796 unités ont été construites pour l’armée américaine dans plusieurs configurations. [24] Timken a fourni des essieux avant et des boîtes de transfert, ajoutés à la militarisation d’un camion civil. La boîte de transfert Timken était la première conception à temps partiel [25] qui permettait au conducteur d’engager ou de désengager la transmission intégrale à l’aide d’un levier à l’intérieur de la cabine. [26] [27] Malgré les budgets militaires américains limités des années 1930, le camion ’34 a été suffisamment apprécié pour qu’un camion plus moderne d’une tonne et demie ait été développé et 1 700 camions RF-40-X-4 (USA) ont été produits. en 1938 et 292 TF-40-X-4 (États-Unis) en 1939. [28] [24]
À partir de 1936, la société japonaise Tokyu Kurogane Kogyo a construit environ 4 700 roadsters à quatre roues motrices, appelés voiture de reconnaissance Kurogane Type 95 , utilisés par l’armée impériale japonaise de 1937 à 1944, pendant la seconde guerre sino-japonaise . Trois styles de carrosserie différents ont été fabriqués – un roadster à deux portes, une camionnette à deux portes et un phaeton à quatre portes, tous équipés d’une boîte de transfert qui engage les roues avant, propulsé par un moteur à air de 1,3 litre à deux cylindres. – moteur bicylindre en V OHV refroidi. [29]
La Mercedes-Benz G5 et la BMW 325 4 × 4 de 1937 étaient équipées d’une transmission intégrale permanente, d’une Direction à quatre roues, de trois différentiels verrouillables et d’une suspension entièrement indépendante. Ils ont été produits en raison d’une demande du gouvernement pour un véhicule de tourisme à quatre roues motrices. Les séries G / Wolf modernes telles que les G500 et G55 AMG présentent encore certains des attributs, à l’exception de la suspension entièrement indépendante, car elle peut compromettre la garde au sol. L’ Unimog est également issu de la technologie 4×4 de Mercedes.
Le premier véhicule à quatre roues motrices produit en Russie, également en partie à usage civil, était le GAZ-61 , développé en Union soviétique en 1938. “Usage civil” peut être un peu impropre, car la plupart, sinon tous , ont été utilisés par le gouvernement et l’armée soviétiques (comme voitures de commandement), mais la version GAZ-61-73 est le premier véhicule à quatre roues motrices avec une carrosserie de berline fermée normale . Des éléments du châssis ont été utilisés dans des véhicules militaires ultérieurs tels que le GAZ-64 de 1940 et le GAZ-67 de 1943 , ainsi que le GAZ-69 d’après-guerre et le GAZ-M-72 proprement civil, basé sur la propulsion arrière. GAZ-20″Victory” et construit de 1955 à 1958. La vie civile soviétique n’a pas permis la prolifération de produits civils tels que la Jeep en Amérique du Nord, mais dans les années 1960, la technologie des véhicules 4 × 4 soviétiques est restée à égalité avec les véhicules britanniques, allemands, et des modèles américains, le dépassant même à certains égards, et à des fins militaires tout aussi activement développées, produites et utilisées.
Seconde Guerre mondiale – un bond dans la prolifération des AWD
 La Jeep américaine Willys 1940-1945
La Jeep américaine Willys 1940-1945
Jusqu’à ce que les véhicules « passe-partout » soient nécessaires pour l’armée à grande échelle, les véhicules à quatre roues motrices et à traction intégrale n’avaient pas trouvé leur place. La Jeep de la Seconde Guerre mondiale , développée à l’origine par American Bantam , mais produite en série par Willys et Ford, est devenue le véhicule à quatre roues motrices le plus connu au monde pendant la guerre. [30] La série américaine Dodge WC et les variantes Chevrolet G506 4×4 ont également été produites par centaines de milliers, ainsi que les camions Canadian Military Pattern , dont les 4×4 étaient de loin les plus répandus de leurs diverses configurations de transmission. Au total, l’Amérique du Nord a construit environ 1+1 ⁄ 2 millions de véhicules 4×4 conduits pendant la guerre, [31] [32] [33]
La disponibilité de certains composants critiques, tels que les boîtes de transfert et en particulier les joints homocinétiques, a affecté le développement. Bien que peu utilisés sur les véhicules utilitaires, [nb 1] les véhicules à traction intégrale en avaient tous besoin ; et ils utiliseraient deux ou trois fois le nombre d’essieux moteurs, ce qui signifie plus de vitesses à couper pour tous les différentiels. Produites jusqu’à la guerre par quelques firmes spécialisées aux capacités limitées, à partir du printemps 1942, Ford, Dodge et Chevrolet s’associent pour les fabriquer en quantité plus de 100 fois supérieure à celle de 1939. [34]
Bien que la Russie ait eu son propre véhicule de type jeep (le GAZ-64) opérationnel en 1940, un an plus tôt que la jeep américaine, dans les premières années de la guerre, elle s’est largement appuyée sur les véhicules de prêt-bail , fournis par l’ouest. alliés. En 1943, ils lancent une version perfectionnée : le GAZ-67 .
En revanche, l’ équivalent le plus proche de la jeep des puissances de l’Axe , la VW Kübelwagen , dont seulement 50 000 exemplaires ont été construits, bien qu’étant équipée de moyeux à engrenages portiques , n’avait qu’une propulsion arrière.
1945-1960
 Une jeep Willys CJ-2A de 1945
Une jeep Willys CJ-2A de 1945  Une Dodge Power Wagon de première génération
Une Dodge Power Wagon de première génération
Willys a présenté le modèle CJ-2A en 1945, le premier véhicule à quatre roues motrices de série à vendre sur le marché général. En raison du succès omniprésent de la Jeep de la Seconde Guerre mondiale, son utilitarisme robuste a établi le modèle pour de nombreux véhicules à quatre roues motrices à venir. [35] Sur ses talons, Dodge a également commencé la production des camions civils 4WD Power Wagon , pour l’année modèle 1946. Le Willys et le Dodge ont tous deux été développés directement à partir de leurs prédécesseurs de la Seconde Guerre mondiale.
Tout aussi boxy que la Jeep, et également propulsé par quatre cylindres en ligne, le Land Rover est apparu au salon de l’automobile d’Amsterdam en 1948. Conçu à l’origine comme un produit provisoire pour le constructeur automobile Rover en difficulté, malgré un sous-investissement chronique, il a bien mieux réussi que leur voitures particulières. Inspiré par un Willys MB – la “jeep” omniprésente de la Seconde Guerre mondiale – qui était fréquemment conduite hors route dans la ferme appartenant à l’ingénieur en chef Maurice Wilks , Land Rover a développé le Range Rover de luxe à 4 roues motrices plus raffiné mais toujours capable de tout-terrain dans les années 1970.
Avec l’acquisition du nom “Jeep” en 1950, Willys avait accaparé la marque. Son successeur, Kaiser Jeep , a présenté un wagon révolutionnaire à 4 roues motrices appelé le Wagoneer en 1963. Non seulement il était techniquement innovant, avec une Suspension avant indépendante et la première transmission automatique couplée à 4 roues motrices, mais il était également équipé et fini comme une voiture de tourisme ordinaire. [36] En effet, c’était l’ancêtre du SUV moderne . Le Super Wagoneer de luxe à moteur AMC ou Buick V8 produit de 1966 à 1969 a placé la barre encore plus haut.
Jensen a appliqué le système de traction intégrale permanente Formula Ferguson (FF) à 318 unités de leur Jensen FF construites de 1966 à 1971, marquant la première utilisation de 4 roues motrices dans une voiture de sport GT de série. [37] Alors que la plupart des systèmes à 4 roues motrices répartissent le couple de manière égale, le Jensen répartit le couple d’environ 40 % à l’avant et 60 % à l’arrière en adaptant l’avant et l’arrière à des rapports différents.
Années 1970 à 1990
American Motors Corporation (AMC) a acquis la division Jeep de Kaiser en 1970 et a rapidement mis à niveau et élargi toute la gamme de véhicules tout-terrain à 4 roues motrices. Avec son contrôle technique accru, le Grand Wagoneer pleine grandeur haut de gamme a continué à rivaliser avec les voitures de luxe traditionnelles . [38] Partiellement construit à la main, il est resté relativement inchangé pendant sa production jusqu’en 1991, même après le rachat d’AMC par Chrysler .
Subaru a présenté le Leone en expansion de catégorie en 1972, un break compact bon marché avec un système de traction intégrale léger à temps partiel qui ne pouvait pas être engagé sur une chaussée sèche. En septembre, AMC a lancé Quadra Trac à traction intégrale à temps plein pour les Jeep Cherokee et Wagoneer de l’année modèle 1973. [39] En raison de la traction intégrale à temps plein, qui a soulagé le conducteur de sortir pour verrouiller les moyeux et d’avoir à sélectionner manuellement entre les modes 2WD et 4WD, il a dominé toutes les autres marques dans la compétition de rallye FIA. Gene Henderson et Ken Pogue ont remporté le championnat Press-on-Indépendamment Rally FIA avec une Jeep équipée de Quadra Trac en 1972. [40]
 1969 Jensen FF , premier 4 roues motrices au monde dans une voiture de sport GT de série
1969 Jensen FF , premier 4 roues motrices au monde dans une voiture de sport GT de série  Un wagon AWD AMC Eagle 1987 , le modèle le plus populaire de la gamme
Un wagon AWD AMC Eagle 1987 , le modèle le plus populaire de la gamme  Un cabriolet AMC Eagle AWD 1981
Un cabriolet AMC Eagle AWD 1981
American Motors a présenté l’innovant Eagle pour l’année modèle 1980. [41] Ce sont les premières voitures américaines de série à utiliser le système complet à quatre roues motrices à moteur avant. [42] L’AMC Eagle était proposé sous forme de berline , de coupé et de break avec des modèles de passagers à traction intégrale automatique permanente. Les nouveaux Eagles combinaient la technologie Jeep avec une plate-forme automobile de tourisme AMC existante et éprouvée . Ils ont inauguré une toute nouvelle catégorie de produits de “sport-utilitaire” ou VUS multisegment. Les Eagles d’AMC sont venus avec le confort et les rendez-vous de haut niveau attendus des modèles de passagers réguliers et ont utilisé la technologie tout-terrain pour une marge supplémentaire de sécurité et de traction. [43]
Le différentiel central à fluide visqueux épais de l’Eagle a fourni un transfert de puissance silencieux et en douceur qui a été dirigé proportionnellement vers l’essieu avec la plus grande traction. Il s’agissait d’un véritable système à plein temps fonctionnant uniquement en quatre roues motrices sans usure excessive des composants de la suspension ou de la transmission. Aucune plage basse n’a été utilisée dans la boîte de transfert. Cela est devenu le précurseur des conceptions qui ont suivi d’autres fabricants. [44] La presse automobile de l’époque a testé la traction des Eagles et l’a décrite comme bien supérieure à celle des Subaru et qu’elle pouvait battre de nombreux soi-disant véhicules tout-terrain. Le magazine Four Wheeler a conclu que l’AMC Eagle était “le début d’une nouvelle génération de voitures”. [45]
Les Eagles étaient populaires (en particulier dans la ceinture de neige ), avaient une capacité de remorquage et se déclinaient en plusieurs niveaux d’équipement, y compris des versions sport et de luxe. Deux modèles supplémentaires ont été ajoutés en 1981, la sous-compacte SX/4 et Kammback. Une transmission manuelle et une fonction de déconnexion de l’essieu avant ont également été mises à disposition pour une plus grande économie de carburant. En 1981 et 1982, un cabriolet unique a été ajouté à la gamme. La carrosserie monocoque de l’Eagle a été renforcée pour la conversion et avait une barre targa en acier avec une section de toit amovible en fibre de verre. [46] Le break Eagle est resté en production pendant une année modèle après que Chrysler a acquis AMC en 1987. La production totale d’AMC Eagle était de près de 200 000 véhicules.
Audi a également présenté une voiture de route à traction intégrale permanente, l’ Audi Quattro , en 1980. L’ingénieur châssis d’Audi, Jörg Bensinger , avait remarqué lors d’essais hivernaux en Finlande qu’un véhicule utilisé par l’ armée ouest-allemande , la Volkswagen Iltis , pourrait battre n’importe quelle Audi haute performance. Il a proposé de développer une voiture à quatre roues motrices qui serait également utilisée pour le rallye afin d’améliorer l’image conservatrice d’Audi. Le système Audi quattro est devenu une caractéristique des voitures de série.
En 1987, Toyota a également développé une voiture conçue pour la compétition dans les campagnes de rallye. [47] Un nombre limité de véhicules spéciaux d’ homologation FIA Celica GT-Four (connus sous le nom de Toyota Celica All-Trac Turbo en Amérique du Nord) ont été produits. Le système All-Trac a ensuite été disponible sur les modèles de série Toyota Camry , Toyota Corolla et Toyota Previa .
Certaines des premières voitures à quatre roues motrices à moteur central étaient les diverses voitures de rallye homologuées pour la route conçues pour l’homologation du groupe B , telles que la Ford RS200 fabriquée de 1984 à 1986. En 1989, le fabricant de niche Panther Westwinds a créé un quatre à moteur central. -roues motrices, le Panther Solo 2 .
2000-présent
Aux États-Unis, à la fin de 2013, les véhicules à traction intégrale représentaient 32 % des ventes de véhicules légers neufs, en hausse de 5 % depuis 2008. [48] Cela est en grande partie dû à la popularité du multisegment . [48] La plupart des multisegments offrent la technologie populaire, malgré l’augmentation du prix des véhicules et de la consommation de carburant. [49] Les constructeurs automobiles ont inondé les consommateurs de marketing proclamant la traction intégrale comme une caractéristique de sécurité, bien que l’avantage de la traction intégrale sur la traction avant se produise dans l’accélération, et non dans le freinage ou la direction. [50] Des tests ont montré que bien que la traction intégrale améliore l’accélération dans des conditions hivernales, elle n’aide pas au freinage. [51]
En 2008, Nissan a présenté la GT-R avec une boîte -pont montée à l’ arrière . Le système AWD nécessite deux arbres de transmission , un arbre principal du moteur à la boîte-pont et au différentiel et un deuxième Arbre de transmission de la boîte-pont aux roues avant. [52]
Les usages
Course sur route
Spyker est crédité de la construction et de la course de la première voiture de course à quatre roues motrices, la Spyker 60 HP en 1903. [53] [17]
Bugatti a créé un total de trois voitures de course à quatre roues motrices, la Type 53 , en 1932, mais les voitures étaient connues pour leur mauvaise maniabilité .
Miller a produit la première voiture 4×4 à se qualifier pour l’Indianapolis 500, la Miller Gulf Special de 1938 .
Ferguson Research Ltd. a construit la voiture de Formule 1 P99 à moteur avant qui a en fait remporté une course hors championnat du monde avec Stirling Moss en 1961. En 1968, l’équipe Lotus a couru des voitures dans l’ Indy 500 et trois ans plus tard en Formule 1 avec la Lotus 56. , qui avait à la fois des moteurs à turbine et 4WD, ainsi que le 4WD-Lotus 63 de 1969 qui avait le moteur Ford Cosworth V8 standard de 3 litres . Matra a également piloté une MS84 similaire et McLaren a inscrit sa M9A au Grand Prix de Grande-Bretagne., tandis que les motoristes Ford-Cosworth ont produit leur propre version, qui a été testée mais jamais courue. Toutes ces voitures de F1 étaient considérées comme inférieures à leurs homologues RWD, car l’avènement de l’appui aérodynamique signifiait qu’une traction adéquate pouvait être obtenue d’une manière plus légère et plus efficace sur le plan mécanique, et l’idée a été abandonnée, bien que Lotus ait essayé à plusieurs reprises.
Nissan et Audi ont eu du succès avec la transmission intégrale dans les courses sur route avec l’avènement de la Nissan Skyline GT-R en 1989. La voiture a connu un tel succès qu’elle a dominé le circuit japonais pendant les premières années de production, passant à de plus grandes et plus grandes. des victoires plus impressionnantes en Australie avant que les pénalités de poids ne finissent par imposer une interdiction de facto de la voiture. Le plus controversé a été la victoire remportée au Grand Prix de Macao en 1990 , où la voiture a mené du début à la fin. La domination d’Audi dans la série Trans-Am en 1988 était tout aussi controversée, car elle a conduit à une pénalité de poids à la mi-saison et à une révision des règles interdisant toutes les voitures AWD; sa domination en Super Touring a finalement conduit à une FIAinterdiction du système AWD en 1998.
La nouvelle réglementation des 24 Heures du Mans 2011 pourrait relancer les AWD/4WD dans les courses sur route, bien que de tels systèmes ne soient autorisés que dans les nouveaux prototypes Le Mans à propulsion hybride . [54] Un exemple est l’ Audi R18 e-tron quattro (vainqueur de la course 2012 , le premier hybride/4 roues motrices à remporter Le Mans), utilisant un moteur électrique dans l’essieu avant avec le moteur à essence à l’arrière. [55]
Dans les camions lourds
Les camions moyens et lourds ont récemment adopté des transmissions 4 × 4; Les camions 4 × 4 de poids moyen sont devenus courants après que Ford a commencé à vendre des camions Ford Super Duty . Ces camions partageaient de nombreuses pièces entre les véhicules légers et moyens, réduisant ainsi les coûts de production. L’ essieu avant Dana 60 est utilisé sur les camions Super Duty moyens et légers. De plus, les Big Three partagent/partagent des pièces entre les entreprises, ce qui réduit les coûts. Le Dana S 110 est actuellement utilisé pour la propulsion arrière, sous les camions de poids moyen Ford et Ram. Le Dana 110 a également été utilisé sur les 4 × 4 de General Motors . Camions Rama commencé à vendre des camions de poids moyen, 4 × 4 et 4 × 2, en 2008. General Motors a vendu un 4 × 4 pour les années modèles 2005–2009.
-
![]()
![]()
Camions moyens GM 4×4
-
![]()
![]()
Workstar international robuste
-
![]()
![]()
Transmission 4 × 4 Ford de poids moyen



Dans les engins de chantier
 Une chargeuse-pelleteuse Case avec 4 roues motrices
Une chargeuse-pelleteuse Case avec 4 roues motrices
Volvo a introduit la chargeuse-pelleteuse à quatre roues motrices modèle 646 en 1977. [56] Case Corporation a emboîté le pas aux États-Unis en 1987. [ citation nécessaire ]
Terminologie
En termes d’ingénierie, “quatre roues motrices” désigne un véhicule dont la puissance est délivrée aux quatre roues réparties sur au moins deux essieux. Le terme “4 × 4” (prononcé quatre par quatre ) était utilisé pour décrire les véhicules militaires nord-américains à quatre roues motrices dès les années 1940, [57] avec le premier chiffre indiquant le nombre d’embouts de roue sur un véhicule et le seconde indiquant le nombre de roues motrices.
Les camions équipés de pneus jumelés sur l’essieu arrière et de deux essieux moteurs sont désignés comme 4 × 4 malgré leurs six roues, car les roues arrière appariées se comportent comme une seule roue à des fins de traction et de classification. Les vrais véhicules 6 × 6 , qui ont trois essieux moteurs, sont classés comme 6 × 6, quel que soit le nombre de roues dont ils disposent. Des exemples de ceux-ci avec deux essieux arrière et un essieu avant sont le Pinzgauer à six roues, qui est populaire auprès des forces de défense du monde entier, et le GMC CCKW à 10 roues rendu célèbre par l’ armée américaine pendant la Seconde Guerre mondiale.
Quatre-roues est un terme connexe s’appliquant aux véhicules tout-terrain et à ne pas confondre avec quatre roues motrices. Le “quatre” dans l’exemple fait référence au véhicule à quatre roues, pas nécessairement toutes motrices.
Systèmes inhabituels
Poussé par un besoin perçu d’un véhicule tout-terrain simple et peu coûteux pour l’exploration pétrolière en Afrique du Nord, le constructeur automobile français Citroën a développé la 2CV Sahara en 1958. Contrairement aux autres véhicules 4 × 4, qui utilisent une boîte de transfert conventionnelle.pour entraîner les essieux avant et arrière, le Sahara avait deux moteurs, chacun entraînant indépendamment un essieu séparé, le moteur arrière étant tourné vers l’arrière. Les deux accélérateurs, embrayages et mécanismes de changement de vitesse pourraient être liés, de sorte que les deux moteurs de 12 ch (9 kW) 425 cm3 (26 pouces cubes) pourraient fonctionner ensemble, ou ils pourraient être séparés et la voiture entraînée uniquement par l’un ou l’autre moteur. Combinée à deux réservoirs de carburant et à deux batteries (qui pouvaient être configurées pour faire fonctionner l’un ou les deux moteurs), la redondance de deux groupes motopropulseurs séparés signifiait qu’ils pouvaient revenir à la civilisation même après des pannes mécaniques majeures. Seulement environ 700 de ces voitures ont été construites, et seulement 27 sont connues pour exister aujourd’hui. [58]
BMC a expérimenté une Mini Moke bimoteur (surnommée la “Twini Moke”) au milieu des années 1960, mais ne l’a jamais mise en production. Cela a profité de la disposition du « bloc d’alimentation » de la Mini , avec un moteur transversal et la boîte de vitesses dans le carter moteur . En installant simplement une deuxième unité moteur / boîte de vitesses à l’arrière, un système 4 × 4 rudimentaire pourrait être produit. Les premiers prototypes avaient des leviers de vitesse et des systèmes d’embrayage séparés pour chaque moteur. Les versions ultérieures envoyées pour évaluation par l’ armée britannique avaient des systèmes liés plus conviviaux.
En 1965, AJM Chadwick a breveté un système 4WD, GB 1113068, qui utilisait des roues hémisphériques pour un véhicule tout-terrain. Vingt ans plus tard, BTE Warne , breveté, GB 2172558, une amélioration de la conception de Chadwick qui n’utilisait pas d’ensembles d’engrenages différentiels. En utilisant des roues quasi sphériques avec la possibilité d’incliner et de tourner chaque roue de manière coordonnée, les roues motrices maintiennent une traction constante. De plus, toutes les roues motrices sont directrices, et comme l’appariement des roues n’est pas nécessaire, des véhicules avec un nombre impair de roues sont possibles sans affecter l’intégrité du système. La décélération progressive est rendue possible en modifiant dynamiquement les rapports de diamètre de roue effectifs avant/arrière.
Suzuki Motors a présenté la Suzuki Escudo Pikes Peak Edition en 1996. Les versions antérieures de Suzuki étaient bimoteurs; à partir de 1996, le moteur est un V6 biturbo de 2,0 litres, accouplé à une boîte manuelle séquentielle à six rapports.
Nissan Motors a développé un système appelé E-4WD , conçu pour les voitures qui sont normalement à traction avant ; cependant, les roues arrière sont alimentées par des moteurs électriques. Ce système a été introduit dans certaines variantes des Nissan Cube et Tiida . (Ceci est similaire au système utilisé sur le Ford Escape Hybrid AWD. [59] )
La division Jeep de Chrysler a lancé le concept Jeep Hurricane bimoteur de 670 ch (500 kW) au Salon international de l’auto de l’Amérique du Nord 2005 à Detroit . Ce véhicule a une capacité unique de “crab crawl”, qui lui permet de pivoter à 360° sur place. Ceci est accompli en entraînant les roues gauches par paire et les roues droites par paire, par opposition à l’entraînement des paires avant et arrière. Une boîte de vitesses centrale permet à un côté de rouler dans le sens opposé de l’autre. Il dispose également de deux Hemi V8.
Certains véhicules hybrides tels que le Lexus RX400h alimentent un système AWD via une paire de moteurs électriques, un aux roues avant et un à l’arrière. Dans le cas de la version modèle AWD du Lexus RX400h (et de son homologue de marque Toyota, le Harrier hybride), les roues avant peuvent également recevoir la puissance d’entraînement directement du moteur à essence du véhicule, ainsi que via les moteurs électriques, alors que le les roues arrière tirent leur puissance uniquement du deuxième moteur électrique. Le transfert de puissance est géré automatiquement par l’électronique interne en fonction des conditions de traction et des besoins, ce qui en fait un système de traction intégrale.
Le système 4RM utilisé dans la Ferrari FFen 2011 est unique en ce qu’il a une boîte-pont arrière avec une boîte-pont avant secondaire reliée directement au moteur. La voiture fonctionne principalement comme un véhicule à propulsion arrière. Les embrayages de la boîte-pont avant s’enclenchent lorsque les roues arrière patinent. L’entraînement aux roues avant est transmis par deux packs d’embrayage infiniment variables qui sont autorisés à “glisser” pour donner les vitesses de roue requises. La boîte-pont avant a trois vitesses, deux avant et arrière. Les deux vitesses avant de la transmission avant correspondent aux quatre vitesses avant inférieures de la transmission arrière. Il n’est pas utilisé dans les rapports supérieurs. La liaison entre cette boîte de vitesses et chaque roue avant se fait par des embrayages indépendants de type Haldex, sans différentiel. En raison de la différence de rapports, les embrayages patinent continuellement et ne transmettent au maximum que 20 % du couple moteur.[60]
Systèmes par type de conception
Différentiel central avec blocage mécanique
- Alfa Romeo 164 Q4 (visco-coupleur central, groupe épicycloïdal et différentiel arrière Torsen)
- Alfa Romeo 155 Q4 (groupe épicycloïdal central, viscocoupleur Ferguson et différentiel arrière Torsen)
- AMC Eagle (couplage visqueux central)
- Audi – Quattro Coupé, 80, 90, 100 & 200 (différentiels central et arrière verrouillables) – jusqu’à 1987
- Audi Q7 – double pignon 50/50 avec pack embrayage de blocage
- BMW série 3 et série 5 dans les années 1980 – différentiel central planétaire avec répartition du couple 37–63 (avant-arrière) et verrouillage visqueux (également dans le différentiel arrière mais pas dans le différentiel avant)
- Chevrolet Rounded-Line K Fleetside , K Stepside , K Blazer et K Suburban – boîte de transfert New Process 203 à quatre roues motrices permanentes (1973–1979) à deux vitesses , différentiel central avec répartition du couple 50:50 et verrouillage. Un blocage de différentiel automatique Eaton était facultatif pour le différentiel hypoïde arrière .
- Ford Escort RS (modèles RS 2000 16v 4×4 et RS Cosworth), modèles Sierra Cosworth, Sierra et Granada 4×4,
- Dodge Power Wagon – boîte de transfert New Process 203 à quatre roues motrices permanentes (1974–1979) à deux vitesses , différentiel central avec répartition du couple 50:50 et verrouillage.
- Ford Expedition (1997-présent) et Expedition EL / Max (2007-présent) – transmission automatique à quatre roues motrices ControlTrac avec boîte de transfert BorgWarner à deux vitesses et différentiel multidisque à centre de verrouillage intelligent
- Ford Explorer (1995–2010) – transmission automatique à quatre roues motrices ControlTrac avec boîte de transfert BorgWarner à deux vitesses et différentiel multidisque à centre de verrouillage intelligent
- Ford Série F – transmission permanente à quatre roues motrices (1974-1979) boîte de transfert New Process 203 à deux vitesses, différentiel central avec répartition du couple 50:50 et verrouillage.
- GMC Rounded-Line K Wideside , K Fenderside , K Jimmy et K Suburban – boîte de transfert New Process 203 à quatre roues motrices permanentes (1973–1979) à deux vitesses, différentiel planétaire central avec répartition du couple 50:50 et verrouillage. Un blocage de différentiel automatique Eaton était facultatif pour le différentiel hypoïde arrière.
- Différentiel central ouvert H1 & Humvee NVG 242HD AMG, différentiel central verrouillé, neutre, plage basse verrouillée. Également différentiel Torsen1 sur les essieux avant et arrière, le H1 est passé à Torsen2 lorsque l’ABS a été ajouté. Le H1 Alpha avait des différentiels de verrouillage en option à la place des torsens.
- Hummer H2, H3 40/60 planétaire avec serrure
- Jeep Grand Cherokee, Commander (sauf modèles équipés de Quadra-Trac I)
- Jeep Liberty , Jeep Cherokee (XJ) , Dodge Durango ( Select-Trac ) – NV 242 boîte de transfert – propulsion arrière, différentiel central ouvert, différentiel central verrouillé, neutre, gamme basse
- Jeeps pleine grandeur avec Borg Warner QuadraTrac : différentiel central à glissement limité, différentiel central verrouillé 50/50. La gamme basse peut être utilisée en mode verrouillé ou déverrouillé, permettant l’utilisation de la gamme basse sur la chaussée.
- Land Rover Defender (et modèles de la série III V8 )
- Land Rover découverte /LR3
- Land Rover Freelander
- Lada Niva (VAZ-2121) – 4 roues motrices permanentes utilisant un différentiel central ouvert. Boîte de transfert avec plage haute/basse et blocage manuel du différentiel central. Gamme basse sélectionnable en mode verrouillé ou déverrouillé, permettant une utilisation sur trottoir.
- Lexus RX300 – couplage visqueux à travers le différentiel central autrement ouvert.
- Lincoln Navigator (1998–2006) – transmission automatique à quatre roues motrices ControlTrac avec boîte de transfert BorgWarner à deux vitesses et différentiel multidisque à centre de verrouillage intelligent
- Navigator et Navigator L (2007-présent) utilisent une boîte de transfert à plage unique à une vitesse, sans engrenage de réduction
- Mercedes-Benz Unimog (verrouillage central et arrière avec jusqu’à 10 vitesses basses).
- Mercedes-Benz Classe G (centre de verrouillage et casiers sur les essieux avant et arrière)
- Mercedes-Benz Classe GL – Système de traction intégrale 4Matic
- Mitsubishi Pajero (également connu sous le nom de Montero ou Shogun)
- Porsche Cayenne – 38/62 planétaire avec pack d’embrayage de verrouillage
- Range Rover Classic 1970–1995 tous les 4 roues motrices à temps plein soit LSD à plaque, verrouillage manuel ou différentiel central visqueux Ferguson.
- Différentiel central visqueux Ferguson 4 roues motrices à temps plein Range Rover 2e génération 1994–2002
- Suzuki Grand Vitara / Escudo (modèles 2005 et ultérieurs, à l’exception du XL-7) – 4 roues motrices permanentes utilisant un différentiel central à glissement limité, 4 roues motrices tout-terrain avec blocage de différentiel central sélectionnable et boîte de transfert à gamme basse 4 modes (4h, 4h de verrouillage , 4l n), antipatinage et contrôle électronique de stabilité
- Subaru – les transmissions manuelles sont livrées avec un différentiel central de type visqueux 50/50 ; les modèles de performance incluent un différentiel planétaire avec verrouillage régulé par ordinateur ; les modèles à transmission automatique ont un embrayage à transfert variable à commande électronique.
- Toyota Land Cruiser
- Toyota Sequoia (multimode)
- Volkswagen Touareg – double pignon 50/50 avec pack embrayage de blocage
Différentiel central Torsen
- Alfa Romeo Q4s – avec ( Torsen T-3):
- 156 Crosswagon et Sportwagon
- 159
- Brera , Araignée
- Audis avec quattro – diverses itérations de Torsen, le T-3 à partir du B7 RS4 2007
- 80, 90 & Coupé (Type 89)
- 100 & 200
- A4 , S4 , RS4
- A5 et S5
- A6 , S6 , RS6
- A8 , S8
- Q5, Q7
- Bentley Continental GT , Bentley Continental Flying Spur (2005) initialement Torsen T-2, actuellement T-3
- Chevrolet Trailblazer SS Torsen T-3
- Lexus GX 470, Toyota Land Cruiser Prado 120 Torsen T-3
- Range Rover 3e génération 2002–2009
- Toyota 4Runner (uniquement modèle 2003-2009 et modèle 2010+ Limited V6) Torsen T-3 avec serrure
- Toyota FJ Cruiser (modèles manuels uniquement) Torsen T-3 avec serrure
- Toyota Hilux Surf Torsen T-3 avec serrure
- Toyota Land Cruiser 200/2008/V8 Torsen T-3 avec serrure
- Toyota Sequoia (modèles 2005–07 uniquement)
- Voitures particulières Volkswagen avec 4motion :
- Volkswagen Passat Torsen T-2 (modèle B5.5, pas le dernier modèle B6 avec moteur transversal)
- Volkswagen Phaeton Torsen T-2
Différentiel central non verrouillable
- BMW Série 3 et X5 entre 2001 et xDrive – différentiel central planétaire avec répartition permanente du couple 38–62 (avant-arrière) #
- Cadillac Escalade, STS AWD, SRX AWD (Les deux premières générations avaient un embrayage visqueux sur le différentiel central) #
- Chrysler 300C AWD #
- Dodge Ramcharger 1974–1981 – Boîte de transfert NP203 FullTime 4WD
- Dodge Magnum, chargeur AWD #
- GMC Yukon Denali, XL Denali, Sierra Denali #
- Voitures Mercedes 4MATIC , classe R et classe ML (notez que certaines ML avaient une gamme basse) #
- Plymouth Trail Duster 1974–1981 – Boîte de transfert NP203 FullTime 4WD
- Toyota Highlander#
- Toyota Sienna AWD (−2010 uniquement) #
Les systèmes ci-dessus se terminant par “#” fonctionnent en utilisant sélectivement le système de contrôle de traction (via ABS) pour freiner une roue qui patine.
Systèmes à embrayage multiple
- Acura RL, RDX ( SH-AWD ) arbre d’essieu droit et gauche
- Acura MDX SH-AWD et VTM4
- Ford Explorer – Système 4WD intelligent à changement de vitesse à la volée (I-4WD) de Ford sur l’Explorer 2011 avec système de gestion du terrain et RSC (Roll Stability Control), fonctionnalité Curve Control, HDC (Hill Descent Control) et HAA (Aide à la montée en côte). [61] [62]
- Honda Ridgeline
- Pilote Honda
- Infiniti FX ( ATTESA E-TS )
- Mercedes-Benz 1ère génération 4MATIC (normalement à propulsion arrière, l’embrayage automatique dans la boîte de transfert engage 4WD sur demande)
- Mitsubishi GTO MR/3000GT VR-4
- Mitsubishi Lancer Evolution Série S-AWC
- Mitsubishi Outlander GT S-AWC 2010
- Mitsubishi Outlander (2003–2006) couplage d’essieu avant et arrière indépendant et différentiel central actif .
- Nissan GT-R ( ATTESA E-TS )
- Nissan Skyline GT-R ( ATTESA E-TS et ATTESA E-TS-PRO ) accouplement d’essieu avant, blocage de différentiel arrière
- Nissan Skyline GTS4 ( ATTESA E-TS )
- Nissan A31 Cefiro SE4 ( ATTESA E-TS )
- Accouplement de train avant Porsche 959 PSK, blocage de différentiel arrière
- Saab 9-3 , Saab 9-5 , Saab 9-4X ( Saab XWD )
Accouplement d’embrayage multidisque
- Audi A3 quattro, Audi S3 , Audi TT quattro, Audi R8 (avec traction Haldex )
- BMW xDrive : dernière série 3 , dernière série 5 , X3, dernière série X5
- Chevrolet Equinox (GMPCA)
- Chrysler Pacifica ( BorgWarner ITM3e) (sur le modèle 2007)
- Dodge Nitro ( Quadra-Trac 1)
- Dodge Calibre
- Ford : Escape, Freestyle, Edge, Fusion, Five Hundred (Freestyle, FiveHundred Haldex Traction based) (Escape Control Trac II , based)
- Honda CR-V , HR-V, élément
- Hyundai Santa Fe , Hyundai Tucson Borg-Warner ITM 3e embrayage magnétique multidisque
- Accouplement d’embrayage multidisque magnétique Hyundai Veracruz IMJ
- Infiniti : G35x, M35x
- Jeep Compass ( Conduite de la liberté )
- Jeep Grand Cherokee et SRT8 NVG 249, 247
- Land Rover Freelander 2 / LR2 (également Haldex Traction ) [63]
- Lamborghini : variantes AWD série VT (traction visqueuse)
- Lincoln : MKS, MKZ
- Mazdaspeed6 (une unité de prise de force liée à un pack d’embrayage avec différentiel arrière sensible au couple)
- Mazda : Tribute, CX-7, CX-9 (tribute Control Trac II , basé)
- Mercury : Milan, Montego, Mariner (base Montego Haldex Traction )
- Mitsubishi Outlander (génération actuelle)
- Nissan Murano automatique avec interrupteur de verrouillage manuel
- Variantes Porsche 911 AWD (une version de BorgWarner ITM3e) – à l’exclusion du différentiel central planétaire Porsche 911 Carrera 4 31/69 de la série 964
- Pontiac Torrent (GMPCA)
- Modèles de transmission automatique à faible puissance Subaru
- Modèles à transmission automatique Subaru Legacy , Outback , Impreza , Forester , Tribeca : traction avant mécanique, essieu arrière couplé à l’embrayage
- Suzuki : SX4, XL7, Aerio, Subaru Justy basé sur Swift/Cultus. (embrayage visqueux)
- Toyota RAV4 – à partir de 2005 (troisième génération uniquement)
- Toyota Sienna AWD (2011 et plus récents uniquement)
- Volkswagen Golf 4motion, Volkswagen Jetta 4motion, Volkswagen Tiguan 4motion, Volkswagen Passat (B6) 4motion (initialement viscocoupleur, plus tard avec Haldex Traction )
- Volvo : S40, S60, S80, V50, V70, XC70, XC90 (système Visco jusqu’en 2003 ; puis tous basés sur Haldex Traction )
Remarque : tout cela fonctionne comme 2 roues motrices lorsque l’embrayage multidisque n’est pas engagé (à l’exception des modèles Subaru), et comme 4 roues motrices haut de gamme dans un système 4 roues motrices à temps partiel lorsque l’embrayage est engagé (généralement par ordinateur bien que certains permettre le contrôle manuel). Certains dans cette catégorie ont divers degrés de contrôle dans la répartition du couple entre l’avant et l’arrière en permettant à certains des embrayages d’un accouplement à embrayage multidisque de s’engager et de glisser des quantités variables. Un exemple d’un tel système est le système BorgWarner i-Trac (TM). Remarque : la liste des voitures basée sur Haldex Traction a été créée à partir de la liste sur le site Web de Haldex Traction : Haldex Cars . Une version du BorgWarnerLe système ITM3e est utilisé sur les Porsche 911TT de 2006 et plus. Le Borg-Warner ITM 3e est également utilisé dans le Hyundai Santa Fe 2006 et le Hyundai Tucson . Dans les Hyundai, l’ITM 3e agit comme une traction intégrale permanente avec une répartition normale du couple de 95:5. Dans des conditions extrêmes, le système peut être verrouillé dans une répartition 50:50 via le bouton 4WD LOCK.
À temps partiel
Ce sont des véhicules qui n’ont pas de différentiel central. Puisqu’il n’y a pas de différentiel central pour tenir compte des différences de vitesse entre les roues avant et arrière lors des virages, une petite quantité de patinage des pneus doit se produire pendant les virages. Lorsqu’il est utilisé sur des surfaces glissantes, ce n’est pas un problème, mais lors d’un virage sur une chaussée sèche, les pneus adhèrent, puis sont obligés de glisser, puis adhèrent à nouveau, et ainsi de suite, jusqu’à ce que le virage soit terminé. Cela amène le véhicule à présenter une sensation de « saut » ou de « liaison ». L’utilisation d’un système 4WD engagé à temps partiel sur une surface dure n’est pas recommandée, car des dommages à la transmission finissent par se produire. Les boîtes de transfert à temps partiel sont la boîte de transfert standard de l’industrie pour le marché des camions 4×4. Toute autre boîte de transfert peut être considérée comme plus robuste, mais plus de pièces mobiles et de complexité peuvent, parfois,
Voir également
- 4WS
- Défoncement des dunes
- Quatre roues motrices en Formule 1
- Différentiel à glissement limité
- Véhicule tout terrain
- Rock rampant
- Véhicule de sport
- Boîte de transfert
- Enroulement de la transmission
Notes de bas de page
- ^ Les véhicules à traction avant n’étaient pas encore devenus courants à cette époque
Références
- ^ un b Mohan, Sankar (12 juin 2000). “Systèmes et stratégies de traction intégrale / quatre roues motrices” (PDF) . Séoul 2000 FISITA World Automotive Congres .
- ^ Andreev, Alexandr F.; Kabanau, Viachaslau; Vantsevitch, Vladimir (2010). Systèmes de transmission des véhicules terrestres : théorie et conception . Presse CRC. p. 34. ISBN 9781439817285.
- ^ Dykes, Alex. “Alphabet Soup: 4 × 4 vs 4WD vs AWD Où est le différentiel?” . thetruthaboutcars.com . Récupéré le 18 décembre 2015 .
- ^ a b Pratique recommandée pour les véhicules de surface – J1952 – Classification du système de traction intégrale , SAE International, octobre 2013 .
- ^ Walczak, Jim. “4WD vs 2WD : les différences entre 4 × 4 et 4 × 2” . about.com . Récupéré le 7 août 2010 .
- ^ Hyde, Charles K. (2013). Arsenal of Democracy: L’industrie automobile américaine pendant la Seconde Guerre mondiale . Wayne State University Press. p. 147–148. ISBN 9780814339527.
- ^ un collier b , Chris. “2WD contre AWD contre 4WD” . ConsumerReports.com . Magazine des rapports des consommateurs . Récupéré le 15 décembre 2015 .
- ^ Williams, Marc. “4WD vs AWD : Quelle est la différence” . MotorTrend.com . Magazine des tendances automobiles . Récupéré le 15 décembre 2015 .
- ^ Allisons.org Automotive History [1] “1929: AEC a commencé à construire des camions AWD en collaboration avec FWD (Royaume-Uni)”
- ^ Meyer, Donald E. (mars 2009). “Le premier siècle de l’histoire des camions GMC” (PDF) . gmheritagecenter.com . Récupéré le 15 septembre 2021 .
- ^ un b Sheppard, Tom (1er septembre 2005). “Percée du système Jeep Grand Cherokee 4WD – 4x … Pour?” . Réseau à quatre roues . Récupéré le 27 mai 2014 .
- ^ Davies, Alex (10 octobre 2014). “Le modèle D est la voiture la plus puissante de Tesla, plus le pilote automatique” . Wired.com . Récupéré le 11 octobre 2014 . Musk a déclaré que l’efficacité supplémentaire est due au système électronique qui transférera la puissance entre les moteurs avant et arrière d’une milliseconde à l’autre, de sorte que chacun fonctionne toujours à son point le plus efficace.
- ^ Brevet de locomotive Diplock 4WD
- ^ “Histoire des véhicules hybrides” . HybridCars.com . 27 mars 2006. Archivé de l’original le 4 septembre 2009 . Récupéré le 25 octobre 2011 . Voir année 1898 .
- ^ “Lohner-Porsche Mixte Voiturette” . Page de voiture ultime. 19 novembre 2007 . Récupéré le 25 octobre 2011 .
- ^ Histoire du sport 4WD – OF4WD
- ^ un b “1903 Spyker 60 HP” . Récupéré le 6 mai 2011 .
- ^ Voiture de course à quatre roues motrices Spyker 60 ch – Musée Louwman
- ^ Les automobiles Badger et FWD à quatre roues motrices – Le vieux moteur
- ^ Allen, Jim (8 mai 2016). “FWD Seagrave Model B: l’un des premiers camions 4×4 à succès” . Réseau de quatre roues . Entreprises extrêmes . Récupéré le 15 février 2018 .
- ^ un b Eckermann, Erik (2001). Histoire mondiale de l’automobile . Société des ingénieurs de l’automobile. p. 76. ISBN 978-0-7680-0800-5. Récupéré le 21 janvier 2013 .
- ^ Redgap, Curtis; Watson, Bill (2010). “Le Jefferys Quad et Nash Quad – Ancêtre 4×4 de la Jeep Willys” . Allpar . Récupéré le 6 décembre 2014 .
- ^ “Histoire de l’Innovation” . Marmon-Herrington. 2009 . Récupéré le 22 mai 2018 .
- ^ a b 1943 Dodge WC-51 Weapons Carrier, Power & Glory – FourWheeler.com
- ^ Allen, Jim (2009). Bible du quadricycle . MotorBook International. p. 21. ISBN 9781616730888.
- ^ DeLorenzo, Matt (15 février 2014). Dodge 100 ans . MotorBook International. p. 55. ISBN 9781627880848.
- ^ 1946-1948 Dodge Power Wagon – HowStuffWorks
- ^ “Guide des numéros de série” . T137.com . Archivé de l’original le 18 juillet 2016 . Récupéré le 15 février 2018 .
- ^ La première voiture compacte à 4 roues motrices produite en série au monde, restaurée – Japanese Nostalgic Car
- ^ Rédacteurs en chef du Air Force Journal of Logistics (2000). La logistique de la guerre – une perspective historique . L’agence de gestion de la logistique de l’armée de l’air. p. 282 . ISBN 9781428993785. Récupéré le 21 janvier 2013 . Il est devenu un véhicule célèbre dans le monde entier et est mentionné dans la majorité des histoires.{{cite book}}: CS1 maint: uses authors parameter (link)
- ^ Hyde, Charles K. (2013). Arsenal of Democracy: L’industrie automobile américaine pendant la Seconde Guerre mondiale . Wayne State University Press. p. 152–153. ISBN 9780814339527.
- ^ Taylor, Peter Shawn (19 avril 2016). “Les camions qui ont battu Hitler” . Poste nationale . Réseau postmédia . Récupéré le 9 mai 2018 .
- ^ Winnington-Ball, Geoff (10 mars 2002). “Camions CMP Softskin” . Feuille d’érable Up.net . Récupéré le 9 mai 2018 .
- ^ Thomson, Harry C.; Mayo, Lida (2003). Le Département de l’Ordnance : approvisionnement et approvisionnement . Washington, DC : Center of Military History, US Army (Publié à l’origine : 1960, Washington, DC, Office of the Chief of Military History, Dept. of the Army). p. 273/274.
- ^ Nunney, MJJ (2012). Technologie des véhicules légers et lourds (quatrième éd.). Routledge. p. 431.ISBN _ 9780750680370. Récupéré le 21 janvier 2013 .
- ^ Foster, Patrick (janvier 2008). “1963 Jeep Wagoneer – Véhicule historique” . Magazine 4 roues motrices et utilitaires sport . Récupéré le 21 janvier 2013 .
- ^ Rédacteurs en chef automatiques du Guide du consommateur (25 juillet 2007). “1966–1971 Jensen FF” . howstuffworks.com . Récupéré le 7 août 2010 . {{cite web}}: |author=a un nom générique ( aide )
- ^ Éditeurs automatiques du Guide du consommateur (29 août 2007). “1978–1979 Jeep Wagoneer Limited” . HowStuffWorks.com . Récupéré le 5 janvier 2011 . {{cite web}}: |author=a un nom générique ( aide )
- ^ Éditeurs automatiques du Guide du consommateur (29 août 2007). “1967-1977 Jeep Wagoner” . howstuffworks.com . Récupéré le 7 août 2010 . {{cite web}}: |author=a un nom générique ( aide )
- ^ Calvin, Jean (1974). Se rallier pour gagner : un guide complet du rallye nord-américain . WWNorton. p. 150. ISBN 978-0-87880-017-9. Récupéré le 5 janvier 2011 .
- ^ Sherman, Don (février 2001). “All-Wheel-Drive Revisited: AMC’s 1980 Eagle a été le pionnier du cross-over SUV” . Industries automobiles. Archivé de l’original le 1er mai 2013 . Récupéré le 21 janvier 2013 .
- ^ Rettie, John (août 1987). “Quatre roues vers votre avenir” . Mécanique Populaire . 164 (8): 58 . Récupéré le 5 janvier 2011 .
- ^ Sass, Rob (9 mars 2008). “Une race de 4 par 4 éclos à la volée” . Le New York Times . Récupéré le 21 janvier 2013 .
- ^ Padgett, Martin (2004). Hummer . Zénith. p. 26. ISBN 978-0-7603-1863-8. Récupéré le 21 janvier 2013 .
- ^ Foster, Patrick R. “1980–88 AMC Eagle 4wd” . Autoweek (archivé sur amxfiles). Archivé de l’original le 30 avril 2008 . Récupéré le 21 janvier 2013 .
- ^ Guide du consommateur, éd. (2005). Histoire de l’automobile américaine . Publications Internationales. p. 532.ISBN _ 978-0-7853-9874-5.
- ^ “Celica All Trac et Gt-Four FAQ” . Alltrac.net . Récupéré le 7 août 2010 .
- ^ un b Kranz, Rick. “Les véhicules à traction intégrale gagnent en popularité auprès des acheteurs de voitures” . Edmonds . Récupéré le 3 août 2017 .
- ^ Chunk, Chris. « Trente pour cent des ventes de voitures neuves seront à traction intégrale d’ici 2015 » . autoblog . Récupéré le 3 août 2017 .
- ^ “Avez-vous vraiment besoin d’une traction intégrale dans la neige?” . Rapports des consommateurs . Récupéré le 3 août 2017 .
- ^ Pierre, Cheney. “Le mythe de la transmission intégrale et pourquoi cela peut être un piège mortel” . Le Gobe et le courrier . Récupéré le 3 août 2017 .
- ^ Loh, Edward (décembre 2007). “Premier coup d’œil : 2008 Nissan GT-R” . Récupéré le 5 janvier 2011 .
- ^ Henry, Allan (1975). Les 4 roues motrices : la formule de l’échec de la course ? . Macmillan.
- ^ “Le Règlement des 24 Heures du Mans 2011” . lemans.org . 6 octobre 2010. Archivé de l’original le 13 juin 2010 . Récupéré le 21 janvier 2013 .
- ^ “La technologie hybride domine la course d’endurance des 24 heures du Mans [VIDEO]” . Autoblog.com .
- ^ “Volvo BM 646 Rétrocaveuse / Chargeur” (PDF) . Volvo AB. Archivé de l’original (PDF) le 22 décembre 2015.
- ^ “Livre d’instructions: conduite, entretien, réparation. Ministère de la Défense nationale, Canada” . bcoy1cpb.pacdat.net . 1940. Archivé de l’original le 21 mars 2012 . Récupéré le 21 janvier 2013 .
- ^ Melissen, Wouter (1er décembre 2004). “Citroën 2CV Sahara” . Ultimatecarpage.com . Récupéré le 21 janvier 2013 .
- ^ “2009 Ford Escape Hybrid Review and Specs” . Edmunds.com . Archivé de l’original le 1er mars 2009 . Récupéré le 1er août 2009 .
- ^ Horrell, Paul (25 janvier 2011). “Ferrari FF Le scoop sur la nouvelle FF de Ferrari” . Topgear.com . Récupéré le 6 mai 2011 .
- ^ Abuelsamid, Sam (26 juillet 2010). “Le Ford Explorer 2011 place le moteur EcoBoost à quatre cylindres au-dessus du V6 en ordre hiérarchique” . Autoblog.com . Récupéré le 26 septembre 2010 .
- ^ “Ford – Voitures, VUS, Camions & Crossovers” . FordVehicles.com (en espagnol). Archivé de l’original le 30 septembre 2010 . Récupéré le 26 septembre 2010 .
- ^ Selon Car and Driver Vol52 No 8, février 2007, page 110