Prothèse
En médecine , une prothèse (pluriel : prothèses ; du grec ancien prothèse , « ajout, application, attachement ») [1] ou implant prothétique [2] [3] est un dispositif artificiel qui remplace une partie manquante du corps, qui peut être perdue par un traumatisme, une maladie ou une affection présente à la naissance ( maladie congénitale ). Les prothèses sont destinées à restaurer les fonctions normales de la partie manquante du corps. [4] La rééducation des amputés est principalement coordonnée par un physiatreau sein d’une équipe interdisciplinaire composée de physiatres, prothésistes, infirmières, kinésithérapeutes et ergothérapeutes. [5] Les prothèses peuvent être créées à la main ou avec la conception assistée par ordinateur (CAO), une interface logicielle qui aide les créateurs à concevoir et à analyser la création avec des graphiques 2D et 3D générés par ordinateur ainsi que des outils d’analyse et d’optimisation. [6]
 Un homme avec une prothèse de membre inférieur
Un homme avec une prothèse de membre inférieur
Les types
La prothèse d’une personne doit être conçue et assemblée en fonction de son apparence et de ses besoins fonctionnels. Par exemple, une personne peut avoir besoin d’une prothèse transradiale, mais elle doit choisir entre un appareil fonctionnel esthétique, un appareil myoélectrique, un appareil alimenté par le corps ou un appareil spécifique à une activité. Les objectifs futurs de la personne et ses capacités économiques peuvent l’aider à choisir entre un ou plusieurs appareils.
Les prothèses craniofaciales comprennent les prothèses intra-orales et extra-orales. Les prothèses extra-orales sont en outre divisées en hémifaciales, auriculaires (oreille), nasales, orbitales et oculaires . Les prothèses intra-orales comprennent les Prothèses dentaires , telles que les Prothèses dentaires , les obturateurs et les implants dentaires .
Les prothèses du cou comprennent les substituts du larynx , la trachée et les remplacements de l’ œsophage supérieur ,
Les prothèses somatiques du torse comprennent les prothèses mammaires qui peuvent être simples ou bilatérales, les prothèses mammaires complètes ou les prothèses mammaires .
Les prothèses péniennes sont utilisées pour traiter la dysfonction érectile , corriger la déformation du pénis , effectuer des procédures de phalloplastie et de métoidioplastie chez les hommes biologiques et pour construire un nouveau pénis dans les chirurgies de changement de sexe de femme à homme .
Prothèses de membres
Les prothèses de membres comprennent à la fois les prothèses des membres supérieurs et inférieurs.
Les prothèses de membre supérieur sont utilisées à différents niveaux d’amputation : quartier avant, désarticulation de l’épaule, prothèse transhumérale, désarticulation du coude, prothèse transradiale, désarticulation du poignet, main entière, main partielle, doigt, doigt partiel. Une prothèse transradiale est un membre artificiel qui remplace un bras manquant sous le coude.
Les prothèses du membre supérieur peuvent être classées en trois catégories principales : les appareils passifs, les appareils alimentés par le corps et les appareils à alimentation externe (myoélectriques). Les dispositifs passifs peuvent être soit des mains passives, principalement utilisées à des fins esthétiques, soit des outils passifs, principalement utilisés pour des activités spécifiques (par exemple, loisirs ou professionnelles). Un aperçu complet et une classification des dispositifs passifs peuvent être trouvés dans une revue de la littérature par Maat et.al. [7]Un dispositif passif peut être statique, c’est-à-dire qu’il n’a pas de pièces mobiles, ou il peut être réglable, c’est-à-dire que sa configuration peut être ajustée (par exemple, ouverture de la main réglable). Malgré l’absence de préhension active, les dispositifs passifs sont très utiles dans les tâches bimanuelles qui nécessitent la fixation ou le soutien d’un objet, ou pour la gesticulation dans l’interaction sociale. Selon des données scientifiques, un tiers des amputés du membre supérieur dans le monde utilisent une main prothétique passive. [7] Les membres actionnés par le corps ou actionnés par câble fonctionnent en attachant un harnais et un câble autour de l’épaule opposée du bras endommagé. La troisième catégorie de prothèses disponibles est celle des bras myoélectriques. Ceux-ci fonctionnent en détectant, via des électrodes , lorsque les muscles de la partie supérieure du brasbouger, provoquant l’ouverture ou la fermeture d’une main artificielle. Dans l’industrie des prothèses, un bras prothétique trans-radial est souvent appelé “BE” ou prothèse sous le coude.
Les prothèses des membres inférieurs permettent des remplacements à différents niveaux d’amputation. Ceux-ci comprennent la désarticulation de la hanche, la prothèse transfémorale, la désarticulation du genou, la prothèse transtibiale, l’amputation de Syme, le pied, le pied partiel et l’orteil. Les deux principales sous-catégories de prothèses des membres inférieurs sont trans-tibiales (toute amputation transectant l’os du tibia ou une anomalie congénitale entraînant une déficience tibiale) et trans-fémorales (toute amputation transectant l’os du fémur ou une anomalie congénitale entraînant une déficience fémorale ). [ citation nécessaire ]
Une prothèse transfémorale est un membre artificiel qui remplace une jambe manquante au-dessus du genou. Les amputés transfémoraux peuvent avoir beaucoup de mal à retrouver un mouvement normal. En général, un amputé transfémoral doit utiliser environ 80 % d’énergie en plus pour marcher qu’une personne avec deux jambes entières. [8] Cela est dû à la complexité des mouvements associés au genou. Dans des conceptions plus récentes et plus améliorées, l’hydraulique, la Fibre de carbone, les liaisons mécaniques, les moteurs, les microprocesseurs informatiques et des combinaisons innovantes de ces technologies sont utilisées pour donner plus de contrôle à l’utilisateur. Dans l’industrie des prothèses, une jambe prothétique trans-fémorale est souvent appelée « AK » ou prothèse au-dessus du genou.
Une prothèse transtibiale est un membre artificiel qui remplace une jambe manquante sous le genou. Un amputé transtibial est généralement capable de retrouver un mouvement normal plus facilement qu’une personne amputée transfémorale, en grande partie grâce à la rétention du genou, ce qui permet un mouvement plus facile. Les prothèses des membres inférieurs décrivent des membres artificiellement remplacés situés au niveau de la hanche ou plus bas. Dans l’industrie des prothèses, une jambe prothétique trans-tibiale est souvent appelée “BK” ou sous la prothèse du genou.
Les physiothérapeutes sont formés pour apprendre à une personne à marcher avec une prothèse de jambe. Pour ce faire, le physiothérapeute peut fournir des instructions verbales et peut également aider à guider la personne à l’aide d’indices tactiles ou tactiles. Cela peut être fait dans une clinique ou à domicile. Certaines recherches suggèrent qu’un tel entraînement à domicile peut être plus efficace si le traitement comprend l’utilisation d’un tapis roulant. [9] L’utilisation d’un tapis roulant, associée au traitement de physiothérapie, aide la personne à relever de nombreux défis liés à la marche avec une prothèse.
Au Royaume-Uni, 75 % des amputations des membres inférieurs sont réalisées en raison d’une circulation inadéquate (dysvascularisation). [10] Cette condition est souvent associée à de nombreuses autres conditions médicales ( comorbidités ), y compris le diabète et les maladies cardiaques, qui peuvent compliquer la récupération et l’utilisation d’un membre prothétique pour retrouver mobilité et indépendance. [10] Pour les personnes qui ont une circulation insuffisante et qui ont perdu un membre inférieur, il n’y a pas suffisamment de preuves en raison d’un manque de recherche pour les informer sur leur choix d’approches de réhabilitation prothétique. [dix]
 Types de prothèses utilisées pour remplacer les articulations du corps humain
Types de prothèses utilisées pour remplacer les articulations du corps humain
Les prothèses des membres inférieurs sont souvent classées par niveau d’amputation ou après le nom d’un chirurgien : [11] [12]
- Transfémoral (au-dessus du genou)
- Transtibial (sous le genou)
- Désarticulation de la cheville (ex : amputation de Syme)
- Désarticulation du genou
- Hémi-pelvictomie (désarticulation de la hanche)
- Amputations partielles du pied (Pirogoff, Talo-Naviculaire et Calcanéo-cuboïde (Chopart), Tarso-métatarsien (Lisfranc), Trans-métatarsien, Métatarsien-phalangien, Ray amputations, amputations d’orteils). [12]
- Rotationplastie de Van Nes
Matières premières prothétiques
Les prothèses sont légères pour une meilleure commodité pour l’amputé. Certains de ces matériaux comprennent :
- Plastiques :
- Polyéthylène
- Polypropylène
- Acryliques
- Polyuréthane
- Bois (premières prothèses)
- Caoutchouc (premières prothèses)
- Métaux légers :
- Titane
- Aluminium
- Matériaux composites:
- Polymères renforcés de fibres de carbone [4]
Les prothèses à roues ont également été largement utilisées dans la réhabilitation des animaux domestiques blessés, notamment les chiens, les chats, les cochons, les lapins et les tortues. [13]
Histoire
 Prothèse d’orteil de l’Égypte ancienne
Prothèse d’orteil de l’Égypte ancienne
Les prothèses proviennent de l’ ancien Proche-Orient vers 3000 avant notre ère, les premières preuves de prothèses apparaissant dans l’Egypte et l’Iran anciens . La première mention enregistrée de prothèses oculaires provient de l’histoire égyptienne de l’ œil d’Horus datant d’environ 3000 av. J.-C., qui implique que l’œil gauche d’ Horus est arraché puis restauré par Thoth . Vers 3000-2800 av. J.-C., la première preuve archéologique de prothèses se trouve dans l’ancien Iran, où une prothèse oculaire est retrouvée enterrée avec une femme à Shahr-i Shōkhta . Il était probablement composé d’une pâte de bitume recouverte d’une fine couche d’or. [14]Les Égyptiens ont également été les premiers pionniers des prothèses de pied, comme le montre l’orteil en bois trouvé sur un corps du Nouvel Empire vers 1000 av. [15] Une autre mention enregistrée au début est trouvée en Asie du Sud vers 1200 av. J.-C., impliquant la reine guerrière Vishpala dans le Rigveda . [16] Des couronnes romaines en bronze ont également été trouvées, mais leur utilisation aurait pu être plus esthétique que médicale. [17]
Une des premières mentions d’une prothèse vient de l’historien grec Hérodote , qui raconte l’histoire d’ Hégésistrate , un devin grec qui s’est coupé le pied pour échapper à ses ravisseurs spartiates et l’a remplacé par un pied en bois. [18]
Prothèse bois et métal
 La jambe de Capoue (réplique)
La jambe de Capoue (réplique)  Main prothétique en fer qui aurait appartenu à Götz von Berlichingen (1480-1562)
Main prothétique en fer qui aurait appartenu à Götz von Berlichingen (1480-1562)  “Illustration de la main mécanique”, c. 1564
“Illustration de la main mécanique”, c. 1564  Main de fer artificielle datant de 1560 à 1600
Main de fer artificielle datant de 1560 à 1600
Pline l’Ancien a également enregistré l’histoire d’un général romain, Marcus Sergius , dont la main droite a été coupée pendant la campagne et s’est fait fabriquer une main de fer pour tenir son bouclier afin qu’il puisse retourner au combat. Un bras prothétique historique célèbre et assez raffiné [19] était celui de Götz von Berlichingen, réalisé au début du XVIe siècle. La première utilisation confirmée d’un dispositif prothétique, cependant, est de 950 à 710 av. En 2000, des pathologistes de recherche ont découvert une momie de cette période enterrée dans la nécropole égyptienne près de l’ancienne Thèbes qui possédait un gros orteil artificiel. Cet orteil, composé de bois et de cuir, présentait des traces d’utilisation. Lorsqu’elle a été reproduite par des ingénieurs en biomécanique en 2011, les chercheurs ont découvert que cette ancienne prothèse permettait à son porteur de marcher pieds nus et avec des sandales de style égyptien. Auparavant, la première prothèse découverte était une jambe artificielle de Capoue . [20]
À peu près à la même époque, François de la Noue aurait également eu une main de fer, tout comme, au XVIIe siècle, René-Robert Cavalier de la Salle . [21] Henri de Tonti avait un crochet prothétique pour une main. Au Moyen Âge, la prothèse est restée assez basique dans sa forme. Les chevaliers affaiblis seraient équipés de prothèses afin qu’ils puissent tenir un bouclier, saisir une lance ou une épée, ou stabiliser un guerrier à cheval. [22] Seuls les riches pouvaient se permettre tout ce qui aiderait dans la vie quotidienne. [ citation nécessaire ]
Une prothèse notable était celle appartenant à un Italien, qui, selon les scientifiques, a remplacé sa main droite amputée par un couteau. [23] [24] Les scientifiques enquêtant sur le squelette, qui a été trouvé dans un cimetière lombard à Povegliano Veronese , ont estimé que l’homme avait vécu entre le 6ème et le 8ème siècle après JC. [25] [24] Les matériaux trouvés près du corps de l’homme suggèrent que la prothèse de couteau était attachée avec une lanière de cuir, qu’il a resserrée à plusieurs reprises avec ses dents. [25]
À la Renaissance, les prothèses se sont développées avec l’utilisation du fer, de l’acier, du cuivre et du bois. Les prothèses fonctionnelles ont commencé à faire leur apparition dans les années 1500. [26]
Le progrès technologique avant le 20e siècle
Un chirurgien italien a enregistré l’existence d’un amputé qui avait un bras qui lui permettait d’enlever son chapeau, d’ouvrir son sac à main et de signer son nom. [27] L’amélioration de la chirurgie d’amputation et de la conception prothétique est venue d’ Ambroise Paré . Parmi ses inventions figurait un appareil au-dessus du genou qui était une prothèse de jambe et de pied à genouillère avec une position fixe, un harnais réglable et une commande de verrouillage du genou. La fonctionnalité de ses progrès a montré comment les futures prothèses pourraient se développer.
Autres améliorations majeures avant l’ère moderne :
- Pieter Verduyn – Première prothèse sous le genou (BK) non verrouillable.
- James Potts – Prothèse composée d’une tige et d’une douille en bois, d’une articulation du genou en acier et d’un pied articulé contrôlé par des tendons de catgut du genou à la cheville. Est devenu connu sous le nom de “Anglesey Leg” ou “Selpho Leg”.
- Sir James Syme – Une nouvelle méthode d’amputation de la cheville qui n’impliquait pas d’amputer à la cuisse.
- Benjamin Palmer – Amélioré par rapport à la jambe Selpho. Ajout d’un ressort antérieur et de tendons dissimulés pour simuler un mouvement d’apparence naturelle.
- Dubois Parmlee – Création d’une prothèse avec une alvéole d’aspiration, un genou polycentrique et un pied multi-articulé.
- Marcel Desoutter & Charles Desoutter – Première prothèse en aluminium [28]
- Henry Heather Bigg et son fils Henry Robert Heather Bigg ont obtenu le commandement de la reine de fournir des “appareils chirurgicaux” aux soldats blessés après la guerre de Crimée. Ils ont développé des bras qui permettaient à un amputé à deux bras de crocheter et une main qui semblait naturelle pour les autres à base d’ivoire, de feutre et de cuir. [29]
À la fin de la Seconde Guerre mondiale, la NAS (Académie nationale des sciences) a commencé à préconiser une meilleure recherche et développement de prothèses. Grâce à un financement gouvernemental, un programme de recherche et développement a été développé au sein de l’armée, de la marine, de l’armée de l’air et de l’administration des anciens combattants.
Histoire moderne des membres inférieurs
 Une usine de membres artificiels en 1941
Une usine de membres artificiels en 1941
Après la Seconde Guerre mondiale, une équipe de l’ Université de Californie à Berkeley, comprenant James Foort et CW Radcliff, a aidé à développer la douille quadrilatérale en développant un système d’ajustement de gabarit pour les amputations au-dessus du genou. La technologie d’emboîture pour les membres inférieurs a connu une nouvelle révolution au cours des années 1980 lorsque John Sabolich, CPO, a inventé l’emboîture Contoured Adducted Trochanteric-Controlled Alignment Method (CATCAM), qui a ensuite évolué pour devenir l’emboîture Sabolich. Il a suivi la direction d’Ivan Long et d’Ossur Christensen alors qu’ils développaient des alternatives à la prise quadrilatérale, qui à son tour suivait la prise à extrémité ouverte, créée à partir de bois. [30]L’avancement était dû à la différence entre la prise et le modèle de contact avec le patient. Auparavant, les douilles étaient fabriquées sous la forme d’une forme carrée sans confinement spécialisé pour le tissu musculaire. De nouvelles conceptions aident ainsi à verrouiller l’anatomie osseuse, à la maintenir en place et à répartir le poids uniformément sur le membre existant ainsi que sur la musculature du patient. La contention ischiatique est bien connue et utilisée aujourd’hui par de nombreux prothésistes pour aider à la prise en charge des patients. Des variantes de l’emboîture de contention ischiatique existent ainsi et chaque emboîture est adaptée aux besoins spécifiques du patient. Tim Staats, Chris Hoyt et Frank Gottschalk ont également contribué au développement et aux changements des sockets au fil des ans.[31]
Les premiers genoux prothétiques contrôlés par microprocesseur sont devenus disponibles au début des années 1990. La prothèse intelligente a été la première prothèse de genou contrôlée par microprocesseur disponible dans le commerce. Il a été publié par Chas. A. Blatchford & Sons, Ltd., de Grande-Bretagne, en 1993 et a rendu la marche avec la prothèse plus naturelle. [32]Une version améliorée a été publiée en 1995 sous le nom de Prothèse Intelligente Plus. Blatchford a lancé une autre prothèse, la prothèse adaptative, en 1998. La prothèse adaptative utilisait des commandes hydrauliques, des commandes pneumatiques et un microprocesseur pour fournir à l’amputé une démarche plus sensible aux changements de vitesse de marche. L’analyse des coûts révèle qu’une prothèse sophistiquée au-dessus du genou coûtera environ 1 million de dollars dans 45 ans, compte tenu uniquement des ajustements annuels au coût de la vie. [33]
En 2019, un projet sous AT2030 a été lancé dans lequel des douilles sur mesure sont fabriquées à l’aide d’un thermoplastique, plutôt qu’à travers un moulage en plâtre. C’est plus rapide à faire et beaucoup moins cher. Les prises étaient appelées prises Amparo Confidence. [34] [35]
Histoire moderne du membre supérieur
En 2005, la DARPA a lancé le programme Revolutionizing Prosthetics. [36] [37] [38] [39] [40] [41]
Procédure patient
Une prothèse est un remplacement fonctionnel d’un membre amputé ou congénitalement malformé ou manquant. Les prothésistes sont responsables de la prescription, de la conception et de la gestion d’un appareil prothétique.
Dans la plupart des cas, le prothésiste commence par prélever un plâtre du membre atteint du patient. Des thermoplastiques légers et à haute résistance sont formés sur mesure pour ce modèle de patient. Des matériaux de pointe tels que la Fibre de carbone, le titane et le Kevlar offrent résistance et durabilité tout en allégeant la nouvelle prothèse. Les prothèses plus sophistiquées sont équipées d’une électronique avancée, offrant une stabilité et un contrôle supplémentaires. [42]
Technologie et fabrication actuelles
 Prothèse de genou fabriquée à l’aide du logiciel de Fabrication assistée par ordinateur WorkNC
Prothèse de genou fabriquée à l’aide du logiciel de Fabrication assistée par ordinateur WorkNC
Au fil des ans, il y a eu des progrès dans les membres artificiels. De nouveaux plastiques et d’autres matériaux, tels que la Fibre de carbone , ont permis aux membres artificiels d’être plus solides et plus légers, limitant la quantité d’énergie supplémentaire nécessaire pour faire fonctionner le membre. Ceci est particulièrement important pour les amputés trans-fémoraux. Des matériaux supplémentaires ont permis aux membres artificiels de paraître beaucoup plus réalistes, ce qui est important pour les amputés transradiaux et transhuméraux car ils sont plus susceptibles d’avoir le membre artificiel exposé. [43]
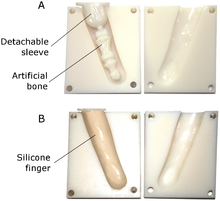 Fabrication d’un doigt prothétique
Fabrication d’un doigt prothétique
En plus des nouveaux matériaux, l’utilisation de l’électronique est devenue très courante dans les membres artificiels. Les membres myoélectriques, qui contrôlent les membres en convertissant les mouvements musculaires en signaux électriques, sont devenus beaucoup plus courants que les membres actionnés par câble. Les signaux myoélectriques sont captés par des électrodes, le signal est intégré et une fois qu’il dépasse un certain seuil, le signal de contrôle du membre prothétique est déclenché, c’est pourquoi, par nature, tous les contrôles myoélectriques sont en retard. À l’inverse, le contrôle par câble est immédiat et physique, et à travers cela offre un certain degré de retour de force direct que le contrôle myoélectrique n’offre pas. Les ordinateurs sont également largement utilisés dans la fabrication des membres. La conception assistée par ordinateur et la Fabrication assistée par ordinateur sont souvent utilisées pour aider à la conception et à la fabrication de membres artificiels.[43] [44]
La plupart des membres artificiels modernes sont attachés au membre résiduel (moignon) de l’amputé par des ceintures et des manchettes ou par aspiration . Le membre résiduel s’insère directement dans une emboîture de la prothèse ou, plus couramment aujourd’hui, un manchon est utilisé qui est ensuite fixé à l’emboîture soit par le vide (prises d’aspiration), soit par un verrou à goupille. Les doublures sont douces et par cela, elles peuvent créer un ajustement d’aspiration bien meilleur que les douilles dures. Les manchons en silicone peuvent être obtenus dans des tailles standard, principalement avec une section transversale circulaire (ronde), mais pour toute autre forme de membre résiduel, des manchons personnalisés peuvent être fabriqués. L’emboîture est fabriquée sur mesure pour s’adapter au membre résiduel et pour répartir les forces du membre artificiel sur toute la zone du membre résiduel (plutôt qu’un seul petit point), ce qui contribue à réduire l’usure du membre résiduel.
Fabrication d’emboîtures prothétiques
La production d’une emboîture prothétique commence par la capture de la géométrie du membre résiduel, ce processus est appelé capture de forme. L’objectif de ce processus est de créer une représentation précise du membre résiduel, ce qui est essentiel pour obtenir un bon ajustement de la douille. [45] L’emboîture personnalisée est créée en prenant un plâtre du membre résiduel ou, plus communément aujourd’hui, de la doublure portée sur leur membre résiduel, puis en fabriquant un moule à partir du plâtre. Le composé couramment utilisé est appelé plâtre de Paris. [46]Ces dernières années, divers systèmes de capture de forme numérique ont été développés qui peuvent être entrés directement dans un ordinateur permettant une conception plus sophistiquée. En général, le processus de capture de forme commence par l’acquisition numérique de données géométriques tridimensionnelles (3D) du membre résiduel de l’amputé. Les données sont acquises avec une sonde, un scanner laser, un scanner à lumière structurée ou un système de numérisation 3D basé sur la photographie. [47]
Après la capture de la forme, la deuxième phase de la production de la douille est appelée rectification, qui est le processus de modification du modèle du membre résiduel en ajoutant du volume à la proéminence osseuse et aux points de pression potentiels et en supprimant le volume de la zone porteuse. Cela peut être fait manuellement en ajoutant ou en enlevant du plâtre au modèle positif, ou virtuellement en manipulant le modèle informatisé dans le logiciel. [48] Enfin, la fabrication de l’emboîture prothétique débute une fois le modèle rectifié et finalisé. Les prothésistes envelopperaient le modèle positif d’une feuille de plastique semi-fondu ou de Fibre de carbone recouverte de résine époxy pour construire l’emboîture prothétique. [45]Pour le modèle informatisé, il peut être imprimé en 3D à l’aide de divers matériaux avec une flexibilité et une résistance mécanique différentes. [49]
L’ajustement optimal de l’emboîture entre le membre résiduel et l’emboîture est essentiel au fonctionnement et à l’utilisation de l’ensemble de la prothèse. Si l’ajustement entre le membre résiduel et la fixation de l’emboîture est trop lâche, cela réduira la zone de contact entre le membre résiduel et l’emboîture ou l’insert, et augmentera les poches entre la peau du membre résiduel et l’emboîture ou l’insert. La pression est alors plus élevée, ce qui peut être douloureux. Les poches d’air peuvent permettre à la sueur de s’accumuler et d’adoucir la peau. En fin de compte, c’est une cause fréquente d’éruptions cutanées avec démangeaisons. Au fil du temps, cela peut entraîner une dégradation de la peau. [8] D’autre part, un ajustement très serré peut augmenter excessivement les pressions d’interface, ce qui peut également entraîner une dégradation de la peau après une utilisation prolongée. [50]
Les membres artificiels sont généralement fabriqués en suivant les étapes suivantes : [43]
- Mesure du membre résiduel
- Mesure du corps pour déterminer la taille requise pour le membre artificiel
- Pose d’un liner en silicone
- Création d’un modèle du manchon porté sur le moignon
- Formation d’ une feuille thermoplastique autour du modèle – Celle-ci est ensuite utilisée pour tester l’ajustement de la prothèse
- Formation de prise permanente
- Formation de pièces en plastique du membre artificiel – Différentes méthodes sont utilisées, y compris le formage sous vide et le Moulage par injection
- Création de pièces métalliques du membre artificiel par moulage sous pression
- Assemblage du membre entier
Bras actionnés par le corps
La technologie actuelle permet aux bras actionnés par le corps de peser environ la moitié à un tiers de ce que fait un bras myoélectrique.
Prises
Les bras actuels alimentés par le corps contiennent des douilles fabriquées à partir d’époxy dur ou de Fibre de carbone. Ces emboîtures ou “interfaces” peuvent être rendues plus confortables en les doublant d’un matériau en mousse compressible plus doux qui fournit un rembourrage pour les proéminences osseuses. Une conception d’emboîture auto-suspendue ou supra-condylienne est utile pour ceux qui ont une absence courte à moyenne sous le coude. Les membres plus longs peuvent nécessiter l’utilisation d’une doublure intérieure de type roll-on verrouillable ou d’un harnais plus complexe pour aider à augmenter la suspension.
Poignets
Les unités de poignet sont soit des connecteurs à vis avec filetage UNF 1/2-20 (USA) soit des connecteurs à dégagement rapide, dont il existe différents modèles.
Ouverture volontaire et fermeture volontaire
Deux types de systèmes à commande manuelle existent, l’ouverture volontaire « tirer pour ouvrir » et la fermeture volontaire « tirer pour fermer ». La quasi-totalité des prothèses « split hook » fonctionnent avec un système de type à ouverture volontaire.
Des “préhenseurs” plus modernes appelés GRIPS utilisent des systèmes de fermeture volontaires. Les différences sont importantes. Les utilisateurs de systèmes d’ouverture volontaire comptent sur des bandes élastiques ou des ressorts pour la force de préhension, tandis que les utilisateurs de systèmes de fermeture volontaire comptent sur leur propre puissance et énergie corporelles pour créer une force de préhension.
Les utilisateurs de fermeture volontaire peuvent générer des forces de préhension équivalentes à la main normale, jusqu’à ou dépassant cent livres. Les GRIPS à fermeture volontaire nécessitent une tension constante pour saisir, comme une main humaine, et dans cette propriété, ils se rapprochent de la performance de la main humaine. Les utilisateurs de crochets fendus à ouverture volontaire sont limités aux forces que leur caoutchouc ou leurs ressorts peuvent générer, qui sont généralement inférieures à 20 livres.
Retour
Une différence supplémentaire existe dans le biofeedback créé qui permet à l’utilisateur de “sentir” ce qui est tenu. Les systèmes d’ouverture volontaire une fois enclenchés fournissent la force de maintien pour qu’ils fonctionnent comme un étau passif au bout du bras. Aucun retour de préhension n’est fourni une fois que le crochet s’est refermé autour de l’objet tenu. Les systèmes de fermeture volontaires fournissent un contrôle directement proportionnel et un biofeedback afin que l’utilisateur puisse sentir la force qu’il applique.
En 1997, le professeur colombien Alvaro Rios Poveda , chercheur en bionique en Amérique latine , met au point une prothèse du membre supérieur et de la main à rétroaction sensorielle . Cette technologie permet aux patients amputés de manipuler les systèmes de prothèses de main de manière plus naturelle. [51]
Une étude récente a montré qu’en stimulant les nerfs médian et cubital, selon les informations fournies par les capteurs artificiels d’une prothèse de main, des informations sensorielles physiologiquement appropriées (quasi naturelles) pouvaient être fournies à une personne amputée. Cette rétroaction a permis au participant de moduler efficacement la force de préhension de la prothèse sans rétroaction visuelle ou auditive. [52]
En février 2013, des chercheurs de l’École Polytechnique Fédérale de Lausanne en Suisse et de la Scuola Superiore Sant’Anna en Italie ont implanté des électrodes dans le bras d’un amputé, ce qui a donné au patient un Retour sensoriel et a permis un contrôle en temps réel de la prothèse. [53] Avec des fils reliés aux nerfs dans le haut de son bras, le patient danois était capable de manipuler des objets et de recevoir instantanément un sens du toucher grâce à la main artificielle spéciale créée par Silvestro Micera et des chercheurs en Suisse et en Italie. [54]
En juillet 2019, cette technologie a été encore plus développée par des chercheurs de l’ Université de l’Utah , dirigés par Jacob George. Le groupe de chercheurs a implanté des électrodes dans le bras du patient pour cartographier plusieurs préceptes sensoriels. Ils stimuleraient ensuite chaque électrode pour comprendre comment chaque précepte sensoriel a été déclenché, puis procéderaient à la cartographie des informations sensorielles sur la prothèse. Cela permettrait aux chercheurs d’obtenir une bonne approximation du même type d’informations que le patient recevrait de sa main naturelle. Malheureusement, le bras est trop cher à acquérir pour l’utilisateur moyen, cependant, Jacob a mentionné que les compagnies d’assurance pourraient couvrir les coûts de la prothèse. [55]
Appareils terminaux
Les dispositifs terminaux contiennent une gamme de crochets, de préhenseurs, de mains ou d’autres dispositifs.
Crochets
Les systèmes de crochets fendus à ouverture volontaire sont simples, pratiques, légers, robustes, polyvalents et relativement abordables.
Un crochet ne correspond pas à une main humaine normale pour l’apparence ou la polyvalence globale, mais ses tolérances matérielles peuvent dépasser et dépasser la main humaine normale pour le stress mécanique (on peut même utiliser un crochet pour trancher des boîtes ouvertes ou comme un marteau alors que ce n’est pas le cas possible avec une main normale), pour la stabilité thermique (on peut utiliser un crochet pour saisir des objets dans l’eau bouillante, pour retourner la viande sur un gril, pour tenir une allumette jusqu’à ce qu’elle soit complètement brûlée) et pour les risques chimiques (comme un crochet métallique résiste aux acides ou à la lessive et ne réagit pas aux solvants comme un gant prothétique ou la peau humaine).
Mains  L’ acteur Owen Wilson agrippant le bras prothétique myoélectrique d’un marine américain
L’ acteur Owen Wilson agrippant le bras prothétique myoélectrique d’un marine américain
Les mains prothétiques sont disponibles à la fois en version à ouverture volontaire et à fermeture volontaire et, en raison de leur mécanique plus complexe et du revêtement cosmétique des gants, nécessitent une force d’activation relativement importante, qui, selon le type de harnais utilisé, peut être inconfortable. [56] Une étude récente de l’Université de technologie de Delft, aux Pays-Bas, a montré que le développement des mains prothétiques mécaniques a été négligé au cours des dernières décennies. L’étude a montré que le niveau de force de pincement de la plupart des aiguilles mécaniques actuelles est trop faible pour une utilisation pratique. [57] La main la mieux testée était une main prothétique développée vers 1945. En 2017 cependant, une recherche a été lancée avec des mains bioniques par Laura Hruby de l’ Université médicale de Vienne .[58] [59] Quelques mains bioniques imprimables en 3D à matériel ouvert sont également devenues disponibles. [60] Certaines entreprises produisent également des mains robotiques avec avant-bras intégré, pour s’adapter au bras d’un patient [61] [62] et en 2020, à l’Institut italien de technologie (IIT), une autre main robotique avec avant-bras intégré (Soft Hand Pro) a été développé. [63]
Fournisseurs commerciaux et matériaux
Hosmer et Otto Bock sont les principaux fournisseurs d’hameçons commerciaux. Les mains mécaniques sont également vendues par Hosmer et Otto Bock; la Becker Hand est toujours fabriquée par la famille Becker. Les mains prothétiques peuvent être équipées de gants en silicone d’apparence cosmétique standard ou sur mesure. Mais des gants de travail ordinaires peuvent également être portés. Les autres terminaux incluent le V2P Prehensor, une pince robuste et polyvalente qui permet aux clients d’en modifier certains aspects, Texas Assist Devices (avec tout un assortiment d’outils) et TRS qui propose une gamme de terminaux pour le sport. Les faisceaux de câbles peuvent être construits à l’aide de câbles en acier d’avion, de rotules et de gaines de câbles autolubrifiantes. Certaines prothèses ont été conçues spécifiquement pour être utilisées en eau salée. [64]
Prothèses des membres inférieurs
 Une prothèse de jambe portée par Ellie Cole
Une prothèse de jambe portée par Ellie Cole
Les prothèses des membres inférieurs décrivent des membres artificiellement remplacés situés au niveau de la hanche ou plus bas. Concernant tous les âges Ephraim et al. (2003) ont trouvé une estimation mondiale des amputations des membres inférieurs toutes causes confondues de 2,0 à 5,9 pour 10 000 habitants. Pour les taux de prévalence à la naissance de la déficience congénitale des membres, ils ont trouvé une estimation entre 3,5 et 7,1 cas pour 10 000 naissances. [65]
Les deux principales sous-catégories de prothèses des membres inférieurs sont trans-tibiales (toute amputation transectant l’os du tibia ou une anomalie congénitale entraînant une déficience tibiale) et trans-fémorales (toute amputation transectant l’os du fémur ou une anomalie congénitale entraînant une carence). Dans l’industrie prothétique, une jambe prothétique trans-tibiale est souvent appelée « BK » ou sous la prothèse du genou tandis que la jambe prothétique trans-fémorale est souvent appelée « AK » ou au-dessus de la prothèse du genou.
Les autres cas moins fréquents des membres inférieurs comprennent les suivants :
- Désarticulations de la hanche – Il s’agit généralement du moment où un patient amputé ou présentant une déficience congénitale subit une amputation ou une anomalie au niveau ou à proximité de l’articulation de la hanche.
- Désarticulations du genou – Il s’agit généralement d’une amputation du genou désarticulant le fémur du tibia.
- Symes – Il s’agit d’une désarticulation de la cheville tout en préservant la talonnière.
Prise
L’emboîture sert d’interface entre le résidu et la prothèse, permettant idéalement une mise en charge confortable, le contrôle des mouvements et la proprioception. [66] Les problèmes de socket, tels que l’inconfort et la dégradation de la peau, sont classés parmi les problèmes les plus importants auxquels sont confrontés les amputés des membres inférieurs. [67]
Tige et connecteurs
Cette partie crée une distance et un soutien entre l’articulation du genou et le pied (dans le cas d’une prothèse de jambe supérieure) ou entre l’emboîture et le pied. Le type de connecteurs utilisés entre la tige et le genou/pied détermine si la prothèse est modulaire ou non. Modulaire signifie que l’angle et le déplacement du pied par rapport à l’emboîture peuvent être modifiés après le montage. Dans les pays en développement, les prothèses sont pour la plupart non modulaires, afin de réduire les coûts. Lorsque l’on considère les enfants, la modularité de l’angle et de la hauteur est importante en raison de leur croissance moyenne de 1,9 cm par an. [68]
Pied
Fournissant un contact avec le sol, le pied offre une absorption des chocs et une stabilité pendant la position. [69] De plus, il influence la biomécanique de la marche par sa forme et sa rigidité. En effet, la trajectoire du centre de pression (COP) et l’angle des forces de réaction au sol sont déterminés par la forme et la rigidité du pied et doivent correspondre à la morphologie du sujet afin de produire une démarche normale. [70] Andrysek (2010) a trouvé 16 types de pieds différents, avec des résultats très variables concernant la durabilité et la biomécanique. Le principal problème rencontré dans les pieds actuels est la durabilité, endurance allant de 16 à 32 mois [71]Ces résultats concernent les adultes et seront probablement pires pour les enfants en raison de niveaux d’activité plus élevés et d’effets d’échelle. Les preuves comparant différents types de prothèses de pieds et de chevilles ne sont pas suffisamment solides pour déterminer si un mécanisme de cheville/pied est supérieur à un autre. [72] Lors du choix d’un appareil, le coût de l’appareil, les besoins fonctionnels d’une personne et la disponibilité d’un appareil particulier doivent être pris en compte. [72]
Articulation du genou
Dans le cas d’une amputation trans-fémorale (au-dessus du genou), il existe également un besoin pour un connecteur complexe fournissant une articulation, permettant la flexion pendant la phase d’oscillation mais pas pendant la position d’appui. Comme son but est de remplacer le genou, l’articulation prothétique du genou est le composant le plus critique de la prothèse pour les amputés trans-fémoraux. La fonction d’une bonne articulation prothétique du genou est d’imiter la fonction du genou normal, par exemple en fournissant un soutien structurel et une stabilité pendant la phase d’appui, mais capable de fléchir de manière contrôlable pendant la phase d’oscillation. Par conséquent, il permet aux utilisateurs d’avoir une démarche douce et économe en énergie et de minimiser l’impact de l’amputation. [73] Le genou prothétique est relié au pied prothétique par la tige, qui est généralement constituée d’un tube en aluminium ou en graphite.
L’un des aspects les plus importants d’une articulation prothétique du genou serait son mécanisme de contrôle de la phase d’appui. La fonction du contrôle de la phase d’appui est d’empêcher la jambe de fléchir lorsque le membre est chargé pendant l’acceptation du poids. Cela garantit la stabilité du genou afin de soutenir la tâche de soutien d’un seul membre de la phase d’appui et assure une transition en douceur vers la phase d’oscillation. Le contrôle de la phase d’appui peut être réalisé de plusieurs manières, y compris les verrous mécaniques, [74] l’alignement relatif des composants prothétiques, [75] le contrôle du frottement activé par le poids, [75] et les mécanismes polycentriques. [76]
Contrôle par microprocesseur
Pour imiter la fonctionnalité du genou pendant la marche, des articulations du genou contrôlées par microprocesseur ont été développées pour contrôler la flexion du genou. Quelques exemples sont le C-leg d’ Otto Bock , introduit en 1997, le Rheo Knee d’Ossur, sorti en 2005, le Power Knee d’Ossur, introduit en 2006, le Plié Knee de Freedom Innovations et le Self Learning Knee de DAW Industries (SLK ). [77]
L’idée a été initialement développée par Kelly James, un ingénieur canadien, à l’ Université de l’Alberta . [78]
Un microprocesseur est utilisé pour interpréter et analyser les signaux des capteurs d’angle du genou et des capteurs de moment. Le microprocesseur reçoit des signaux de ses capteurs pour déterminer le type de mouvement utilisé par l’amputé. La plupart des articulations du genou contrôlées par microprocesseur sont alimentées par une batterie logée à l’intérieur de la prothèse.
Les signaux sensoriels calculés par le microprocesseur sont utilisés pour contrôler la résistance générée par les vérins hydrauliques dans l’articulation du genou. De petites vannes contrôlent la quantité de fluide hydraulique qui peut entrer et sortir du cylindre, régulant ainsi l’extension et la compression d’un piston relié à la partie supérieure du genou. [33]
Le principal avantage d’une prothèse contrôlée par microprocesseur est une approximation plus proche de la démarche naturelle d’un amputé. Certains permettent aux amputés de marcher à une vitesse proche de la marche ou de courir. Des variations de vitesse sont également possibles et sont prises en compte par des capteurs et communiquées au microprocesseur qui s’adapte à ces changements en conséquence. Il permet également aux amputés de descendre les escaliers avec une approche pas à pas, plutôt que l’approche une étape à la fois utilisée avec les genoux mécaniques. [79] Certaines recherches suggèrent que les personnes portant des prothèses contrôlées par microprocesseur signalent une plus grande satisfaction et une amélioration de la fonctionnalité, de la santé des membres résiduels et de la sécurité. [80]Les gens peuvent être en mesure d’effectuer des activités quotidiennes à des vitesses plus élevées, même en multitâche, et de réduire leur risque de chutes. [80]
Cependant, certains présentent des inconvénients importants qui nuisent à son utilisation. Ils peuvent être sensibles aux dégâts des eaux et il faut donc faire très attention pour s’assurer que la prothèse reste sèche. [81]
Myoélectrique
Une prothèse myoélectrique utilise comme information la tension électrique générée à chaque fois qu’un muscle se contracte. Cette tension peut être captée des muscles contractés volontairement par des électrodes appliquées sur la peau pour contrôler les mouvements de la prothèse, tels que la flexion/extension du coude, la supination/pronation (rotation) du poignet ou l’ouverture/fermeture des doigts. Une prothèse de ce type utilise le système neuromusculaire résiduel du corps humain pour commander les fonctions d’une main, d’un poignet, d’un coude ou d’un pied prothétiques électriques. [82]Ceci est différent d’une prothèse à interrupteur électrique, qui nécessite des sangles et/ou des câbles actionnés par les mouvements du corps pour actionner ou faire fonctionner des interrupteurs qui contrôlent les mouvements de la prothèse. Il n’y a aucune preuve claire concluant que les prothèses myoélectriques des membres supérieurs fonctionnent mieux que les prothèses à propulsion corporelle. [83] Les avantages de l’utilisation d’une prothèse myoélectrique du membre supérieur comprennent le potentiel d’amélioration de l’attrait esthétique (ce type de prothèse peut avoir un aspect plus naturel), peut être meilleur pour les activités quotidiennes légères et peut être bénéfique pour les personnes souffrant de douleurs au membre fantôme . . [83]Par rapport à une prothèse actionnée par le corps, une prothèse myoélectrique peut ne pas être aussi durable, peut avoir un temps de formation plus long, peut nécessiter plus d’ajustements, peut nécessiter plus d’entretien et ne fournit pas de rétroaction à l’utilisateur. [83]
Le professeur Alvaro Ríos Poveda travaille depuis plusieurs années sur une solution non invasive et abordable à ce problème de rétroaction. Il considère que : “Les membres prothétiques qui peuvent être contrôlés par la pensée sont très prometteurs pour l’amputé, mais sans rétroaction sensorielle des signaux retournant au cerveau, il peut être difficile d’atteindre le niveau de contrôle nécessaire pour effectuer des mouvements précis. Lors de la connexion le sens du toucher d’une main mécanique directement au cerveau, les prothèses peuvent restaurer la fonction du membre amputé d’une manière presque naturelle.” Il a présenté la première main prothétique myoélectrique avec rétroaction sensorielle au XVIIIe Congrès mondial de physique médicale et de génie biomédical , 1997, qui s’est tenu à Nice, France . [84][85]
L’URSS a été la première à développer un bras myoélectrique en 1958, [86] tandis que le premier bras myoélectrique est devenu commercial en 1964 par le Central Prosthetic Research Institute de l’ URSS , et distribué par la Hangar Limb Factory du Royaume- Uni . [87] [88]
Prothèses robotiques
Contrôle cérébral du mouvement du bras prothétique 3D (toucher des cibles). Ce film a été enregistré lorsque le participant contrôlait le mouvement 3D d’un bras prothétique pour atteindre des cibles physiques dans un laboratoire de recherche.
Les robots peuvent être utilisés pour générer des mesures objectives de la déficience du patient et des résultats de la thérapie, aider au diagnostic, personnaliser les thérapies en fonction des capacités motrices du patient, assurer le respect des schémas thérapeutiques et conserver les dossiers du patient. Il est démontré dans de nombreuses études qu’il existe une amélioration significative de la fonction motrice des membres supérieurs après un AVC en utilisant la robotique pour la rééducation des membres supérieurs. [89] Pour qu’un membre prothétique robotique fonctionne, il doit avoir plusieurs composants pour l’intégrer dans la fonction du corps : Les biocapteurs détectent les signaux provenant des systèmes nerveux ou musculaire de l’utilisateur. Il relaie ensuite ces informations à un microcontrôleursitué à l’intérieur de l’appareil, et traite les commentaires du membre et de l’actionneur, par exemple, la position ou la force, et les envoie au contrôleur. Les exemples incluent des électrodes de surface qui détectent l’activité électrique sur la peau, des électrodes à aiguille implantées dans le muscle ou des réseaux d’électrodes à l’état solide avec des nerfs qui se développent à travers eux. Un type de ces biocapteurs est utilisé dans les prothèses myoélectriques .
Un appareil connu sous le nom de contrôleur est connecté aux systèmes nerveux et musculaire de l’utilisateur et à l’appareil lui-même. Il envoie des commandes d’intention de l’utilisateur aux actionneurs de l’appareil et interprète les retours des capteurs mécaniques et biocapteurs à l’utilisateur. Le contrôleur est également responsable de la surveillance et du contrôle des mouvements de l’appareil.
Un actionneur imite les actions d’un muscle dans la production de force et de mouvement. Les exemples incluent un moteur qui aide ou remplace le tissu musculaire d’origine.
La réinnervation musculaire ciblée (TMR) est une technique dans laquelle les nerfs moteurs , qui contrôlaient auparavant les muscles d’un membre amputé, sont réacheminés chirurgicalement de manière à réinnerver une petite région d’un gros muscle intact, tel que le grand pectoral . Par conséquent, lorsqu’un patient pense à bouger le pouce de sa main manquante, une petite zone musculaire sur sa poitrine se contracte à la place. En plaçant des capteurs sur le muscle réinnervé, ces contractions peuvent être faites pour contrôler le mouvement d’une partie appropriée de la prothèse robotique. [90] [91]
Une variante de cette technique est appelée réinnervation sensorielle ciblée (TSR). Cette procédure est similaire à la TMR, sauf que les nerfs sensoriels sont réacheminés chirurgicalement vers la peau de la poitrine, plutôt que les nerfs moteurs réacheminés vers le muscle. Récemment, les membres robotiques ont amélioré leur capacité à capter les signaux du cerveau humain et à traduire ces signaux en mouvement dans le membre artificiel. La DARPA , la division de recherche du Pentagone, s’efforce de faire encore plus de progrès dans ce domaine. Leur désir est de créer un membre artificiel directement relié au système nerveux . [92]
Bras robotiques
Les progrès des processeurs utilisés dans les bras myoélectriques ont permis aux développeurs de gagner en contrôle précis de la prothèse. Le Boston Digital Arm est un membre artificiel récent qui a tiré parti de ces processeurs plus avancés. Le bras permet un mouvement sur cinq axes et permet de programmer le bras pour une sensation plus personnalisée. Récemment, la main I-LIMB , inventée à Édimbourg, en Écosse, par David Gow , est devenue la première prothèse de main disponible dans le commerce avec cinq doigts alimentés individuellement. La main possède également un pouce rotatif manuel qui est actionné passivement par l’utilisateur et permet à la main de saisir dans les modes de précision, de puissance et de prise de clé. [93]
Une autre prothèse neurale est le Proto 1 du laboratoire de physique appliquée de l’Université Johns Hopkins . Outre le Proto 1, l’université a également terminé le Proto 2 en 2010. [94] Début 2013, Max Ortiz Catalan et Rickard Brånemark de l’Université de technologie Chalmers et de l’hôpital universitaire Sahlgrenska en Suède ont réussi à fabriquer le premier bras robotique qui est contrôlée par l’esprit et peut être fixée de manière permanente au corps (par ostéointégration ). [95] [96] [97]
Une approche très utile est appelée rotation du bras, qui est courante chez les amputés unilatéraux, c’est-à-dire une amputation qui n’affecte qu’un côté du corps. et également essentiel pour les amputés bilatéraux, une personne qui est portée disparue ou qui a été amputée des deux bras ou des jambes, pour mener à bien les activités de la vie quotidienne. Il s’agit d’insérer un petit aimant permanent dans l’extrémité distale de l’os résiduel des sujets amputés du membre supérieur. Lorsqu’un sujet fait tourner le bras résiduel, l’aimant tourne avec l’os résiduel, provoquant une modification de la distribution du champ magnétique. [98]Les signaux EEG (électroencéphalogramme), détectés à l’aide de petits disques métalliques plats fixés au cuir chevelu, décodant essentiellement l’activité cérébrale humaine utilisée pour les mouvements physiques, sont utilisés pour contrôler les membres robotiques. Cela permet à l’utilisateur de contrôler directement la pièce. [99]
Prothèses transtibiales robotisées
La recherche sur les jambes robotiques a fait des progrès au fil du temps, permettant un mouvement et un contrôle précis.
Des chercheurs du Rehabilitation Institute of Chicago ont annoncé en septembre 2013 qu’ils avaient développé une jambe robotique qui traduit les impulsions neurales des muscles de la cuisse de l’utilisateur en mouvement, qui est la première jambe prothétique à le faire. Il est actuellement en test. [100]
Hugh Herr, chef du groupe de biomécatronique au Media Lab du MIT, a développé une jambe transtibiale robotisée (PowerFoot BiOM). [101] [102]
La société islandaise Össur a également créé une jambe transtibiale robotisée avec une cheville motorisée qui se déplace grâce à des algorithmes et des capteurs qui ajustent automatiquement l’angle du pied à différents points de la foulée de son porteur. Il existe également des jambes bioniques contrôlées par le cerveau qui permettent à un individu de bouger ses membres avec un émetteur sans fil. [103]
Conception de prothèse
L’objectif principal d’une prothèse robotique est de fournir un actionnement actif pendant la marche pour améliorer la biomécanique de la marche, y compris, entre autres, la stabilité, la symétrie ou la dépense énergétique pour les amputés. [104] Il existe plusieurs jambes prothétiques motorisées actuellement sur le marché, notamment des jambes entièrement motorisées, dans lesquelles des actionneurs entraînent directement les articulations, et des jambes semi-actives, qui utilisent de petites quantités d’énergie et un petit actionneur pour modifier les propriétés mécaniques de la jambe, mais n’injectez pas d’énergie positive nette dans la marche. Des exemples spécifiques incluent l’emPOWER de BionX, le Proprio Foot d’Ossur et l’Elan Foot d’Endolite. [105] [106] [107] Divers groupes de recherche ont également expérimenté des jambes robotiques au cours de la dernière décennie. [108]Les questions centrales faisant l’objet de recherches incluent la conception du comportement de l’appareil pendant les phases d’appui et d’oscillation, la reconnaissance de la tâche de marche actuelle et divers problèmes de conception mécanique tels que la robustesse, le poids, la durée de vie/l’efficacité de la batterie et le niveau de bruit. Cependant, des scientifiques de l’Université de Stanford et de l’Université nationale de Séoul ont développé un système de nerfs artificiels qui aidera les membres prothétiques à se sentir. [109] Ce système nerveux synthétique permet aux membres prothétiques de ressentir le braille , de ressentir le sens du toucher et de réagir à l’environnement. [110] [111]
Utilisation de matériaux recyclés
Des prothèses sont fabriquées à partir de bouteilles et de couvercles en plastique recyclés dans le monde entier. [112] [113] [114] [115] [116]
Attachement au corps
La plupart des prothèses peuvent être fixées à l’extérieur du corps, de manière non permanente. D’autres cependant peuvent être attachés de manière permanente. Les exoprothèses en sont un exemple (voir ci-dessous).
Fixation osseuse directe et ostéointégration
L’ostéointégration est une méthode de fixation du membre artificiel au corps. Cette méthode est aussi parfois appelée exoprothèse (fixation d’un membre artificiel à l’os) ou endo-exoprothèse.
La méthode du moignon et de l’emboîture peut provoquer une douleur importante chez l’amputé, c’est pourquoi l’attachement direct à l’os a été largement exploré. La méthode fonctionne en insérant un boulon en titane dans l’os à l’extrémité du moignon. Après plusieurs mois, l’ os se fixe au boulon en titane et un pilier est fixé au boulon en titane. Le pilier s’étend hors du moignon et le membre artificiel (amovible) est ensuite fixé au pilier. Certains des avantages de cette méthode sont les suivants :
- Meilleur contrôle musculaire de la prothèse.
- La capacité de porter la prothèse pendant une longue période de temps ; avec la méthode du moignon et de l’emboîture, cela n’est pas possible.
- La capacité des amputés transfémoraux à conduire une voiture.
Le principal inconvénient de cette méthode est que les amputés avec l’attachement direct à l’os ne peuvent pas avoir d’impacts importants sur le membre, tels que ceux subis pendant le jogging, en raison du risque de rupture de l’os. [8]
Cosmésis
Les prothèses cosmétiques ont longtemps été utilisées pour dissimuler des blessures et des défigurations. Grâce aux progrès de la technologie moderne, la cosmétique , la création de membres réalistes en silicone ou en PVC , a été rendue possible. [117]Ces prothèses, y compris les mains artificielles, peuvent désormais être conçues pour simuler l’apparence de vraies mains, avec des taches de rousseur, des veines, des cheveux, des empreintes digitales et même des tatouages. Les cosmétiques sur mesure sont généralement plus chers (coûtant des milliers de dollars américains, selon le niveau de détail), tandis que les cosmétiques standard sont préfabriqués dans une variété de tailles, bien qu’ils ne soient souvent pas aussi réalistes que leurs homologues sur mesure. Une autre option est la couverture en silicone sur mesure, qui peut être adaptée au teint de la peau d’une personne, mais pas aux détails tels que les taches de rousseur ou les rides. Les cosmétiques sont attachés au corps de plusieurs façons, à l’aide d’un adhésif, d’une ventouse, d’une peau ajustée, extensible ou d’un manchon cutané.
Cognition
Contrairement aux prothèses neuromotrices, les prothèses neurocognitives détecteraient ou moduleraient la fonction neuronale afin de reconstituer ou d’augmenter physiquement les processus cognitifs tels que la fonction exécutive , l’ attention , le langage et la mémoire. Aucune prothèse neurocognitive n’est actuellement disponible, mais le développement d’interfaces cerveau-ordinateur neurocognitives implantables a été proposé pour aider à traiter des affections telles que les accidents vasculaires cérébraux , les lésions cérébrales traumatiques , la paralysie cérébrale , l’autisme et la maladie d’Alzheimer . [118]Le domaine récent des technologies d’assistance pour la cognition concerne le développement de technologies pour augmenter la cognition humaine. Les dispositifs de planification tels que Neuropage rappellent aux utilisateurs ayant des troubles de la mémoire quand effectuer certaines activités, telles que la visite chez le médecin. Des dispositifs de micro-invite tels que PEAT, AbleLink et Guide ont été utilisés pour aider les utilisateurs ayant des problèmes de mémoire et de fonction exécutive à effectuer des activités de la vie quotidienne .
Rehaussement prothétique
 sergent. Jerrod Fields, un espoir de sprinter paralympique du programme des athlètes de classe mondiale de l’armée américaine, s’entraîne au centre d’entraînement olympique américain de Chula Vista, en Californie. Amputé sous le genou, Fields a remporté une médaille d’or au 100 mètres avec un temps de 12,15 secondes aux Endeavour Games à Edmond, OK, le 13 juin 2009
sergent. Jerrod Fields, un espoir de sprinter paralympique du programme des athlètes de classe mondiale de l’armée américaine, s’entraîne au centre d’entraînement olympique américain de Chula Vista, en Californie. Amputé sous le genou, Fields a remporté une médaille d’or au 100 mètres avec un temps de 12,15 secondes aux Endeavour Games à Edmond, OK, le 13 juin 2009
En plus du membre artificiel standard pour un usage quotidien, de nombreux amputés ou patients congénitaux ont des membres et des dispositifs spéciaux pour faciliter la participation à des activités sportives et récréatives.
Dans la science-fiction et, plus récemment, dans la communauté scientifique , on a envisagé d’utiliser des prothèses avancées pour remplacer des parties du corps saines par des mécanismes et des systèmes artificiels pour améliorer la fonction. La moralité et l’opportunité de telles technologies sont débattues par les transhumanistes , d’autres éthiciens et d’autres en général. [119] [120] [121] [122] [ par qui ? ] Les parties du corps telles que les jambes, les bras, les mains, les pieds et autres peuvent être remplacées.
La première expérience avec un individu en bonne santé semble avoir été celle du scientifique britannique Kevin Warwick . En 2002, un implant a été interfacé directement dans le système nerveux de Warwick. Le porte- électrodes , qui contenait une centaine d’ électrodes , était placé dans le nerf médian . Les signaux produits étaient suffisamment détaillés pour qu’un bras de robot puisse imiter les actions du propre bras de Warwick et fournir à nouveau une forme de retour tactile via l’implant. [123]
La société DEKA de Dean Kamen a développé le “Luke arm”, une prothèse avancée contrôlée par les nerfs . Les essais cliniques ont commencé en 2008, [124] avec l’approbation de la FDA en 2014 et la fabrication commerciale par Universal Instruments Corporation prévue en 2017. Le prix proposé au détail par Mobius Bionics devrait être d’environ 100 000 $. [125]
Des recherches plus approfondies en avril 2019 ont permis d’améliorer la fonction prothétique et le confort des systèmes portables personnalisés imprimés en 3D. Au lieu d’une intégration manuelle après l’impression, l’intégration de capteurs électroniques à l’intersection entre une prothèse et le tissu du porteur peut recueillir des informations telles que la pression sur le tissu du porteur, ce qui peut aider à améliorer l’itération de ces types de prothèse. [126]
Oscar Pistorius
Au début de 2008, Oscar Pistorius , le “Blade Runner” d’Afrique du Sud, a été brièvement déclaré inéligible pour participer aux Jeux olympiques d’été de 2008 parce que ses membres de prothèse transtibiale lui donneraient un avantage injuste sur les coureurs qui avaient des chevilles. Un chercheur a découvert que ses membres utilisaient vingt-cinq pour cent moins d’énergie que ceux d’un coureur valide se déplaçant à la même vitesse. Cette décision a été annulée en appel, la cour d’appel déclarant que l’ensemble des avantages et des inconvénients des membres de Pistorius n’avait pas été pris en compte.
Pistorius ne s’est pas qualifié pour l’équipe sud-africaine pour les Jeux olympiques, mais a ensuite balayé les Jeux paralympiques d’été de 2008 et a été jugé éligible pour se qualifier pour tous les futurs Jeux olympiques. [ citation nécessaire ] Il s’est qualifié pour le Championnat du monde 2011 en Corée du Sud et a atteint la demi-finale où il a terminé la dernière fois, il était 14e au premier tour, son record personnel à 400 m lui aurait donné la 5e place en finale. Aux Jeux olympiques d’été de 2012 à Londres, Pistorius est devenu le premier coureur amputé à participer à des Jeux olympiques. [127] Il a couru dans les demi-finales de course de 400 mètres , [128] [129] [130] et le4 finales de course de relais de 400 mètres . [131] Il a également participé à 5 épreuves aux Jeux paralympiques d’été de 2012 à Londres. [132]
Considérations sur la conception
Il y a plusieurs facteurs à considérer lors de la conception d’une prothèse transtibiale. Les fabricants doivent faire des choix quant à leurs priorités concernant ces facteurs.
Performance
Néanmoins, certains éléments de la mécanique de l’emboîture et du pied sont inestimables pour l’athlète, et ceux-ci sont au centre des préoccupations des entreprises de prothèses de haute technologie d’aujourd’hui :
- Ajustement – les amputés sportifs/actifs, ou ceux qui ont des résidus osseux, peuvent nécessiter un ajustement soigneusement détaillé de l’emboîture ; les patients moins actifs peuvent être à l’aise avec un ajustement « contact total » et une doublure en gel
- Stockage et retour d’énergie – stockage de l’énergie acquise par contact avec le sol et utilisation de cette énergie stockée pour la propulsion
- Absorption d’énergie – minimisant l’effet d’un impact élevé sur le système musculo-squelettique
- Conformité au sol – stabilité indépendante du type de terrain et de l’angle
- Rotation – facilité de changement de direction
- Poids – maximisant le confort, l’équilibre et la vitesse
- Suspension – comment la douille se joindra et s’adaptera au membre
Autre
L’acheteur est également concerné par de nombreux autres facteurs :
- Produits de beauté
- Coût
- Facilité d’utilisation
- Disponibilité des tailles
Liberté de coût et de source
Coût élevé
Aux États-Unis, un membre prothétique typique coûte entre 15 000 $ et 90 000 $, selon le type de membre souhaité par le patient. Avec une assurance médicale, un patient paiera généralement 10 à 50 % du coût total d’un membre prothétique, tandis que la compagnie d’assurance couvrira le reste du coût. Le pourcentage que le patient paie varie selon le type de régime d’assurance, ainsi que le membre demandé par le patient. [133] Au Royaume-Uni, une grande partie de l’Europe, de l’Australie et de la Nouvelle-Zélande, le coût total des membres prothétiques est couvert par un financement public ou une assurance légale. Par exemple, en Australie, les prothèses sont entièrement financées par les régimes publics en cas d’amputation pour cause de maladie, et par l’indemnisation des accidents du travail ou l’assurance contre les accidents de la circulation dans le cas de la plupart des amputations traumatiques. [134] LeLe régime national d’assurance invalidité , qui est déployé à l’échelle nationale entre 2017 et 2020, paie également les prothèses.
Les prothèses transradiales (au-dessous de l’amputation du coude) et transtibiales (au-dessous de l’amputation du genou) coûtent généralement entre 6 000 et 8 000 USD , tandis que les prothèses transfémorales (au-dessus de l’amputation du genou) et transhumérales (au-dessus de l’amputation du coude) coûtent environ le double avec une gamme de 10 000 $ à 15 000 $ et peut parfois atteindre des coûts de 35 000 $. Le coût d’un membre artificiel revient souvent, tandis qu’un membre doit généralement être remplacé tous les 3 à 4 ans en raison de l’ usure d’une utilisation quotidienne. De plus, si l’emboîture présente des problèmes d’ajustement, elle doit être remplacée dans les mois qui suivent l’apparition de la douleur. Si la hauteur est un problème, des composants tels que des pylônes peuvent être modifiés. [135]
Non seulement le patient doit payer pour ses membres prothétiques multiples, mais il doit également payer pour la physiothérapie et l’ergothérapie qui accompagnent l’adaptation à la vie avec un membre artificiel. Contrairement au coût récurrent des membres prothétiques, le patient ne paiera généralement que 2 000 $ à 5 000 $ pour le traitement au cours de la première ou des deux premières années de vie en tant qu’amputé. Une fois que le patient est fort et à l’aise avec son nouveau membre, il ne sera plus obligé de suivre une thérapie. Tout au long de sa vie, on prévoit qu’un amputé typique subira des traitements d’une valeur de 1,4 million de dollars, y compris des chirurgies, des prothèses et des thérapies. [133]
Faible coût
Les prothèses au-dessus du genou à faible coût ne fournissent souvent qu’un soutien structurel de base avec une fonction limitée. Cette fonction est souvent réalisée avec des articulations de genou brutes, non articulées, instables ou à verrouillage manuel. Un nombre limité d’organisations, comme le Comité international de la Croix-Rouge (CICR), créent des dispositifs pour les pays en développement. Leur dispositif, fabriqué par CR Equipments, est une articulation de genou prothétique en polymère verrouillable à axe unique et à commande manuelle. [136]
Table. Liste des technologies d’articulation du genou basée sur la revue de la littérature. [71]
| Nom de la technologie (pays d’origine) | Brève description | Niveau le plus élevé de
preuve |
|---|---|---|
| Genou CICR (Suisse) | Mono-axe avec verrouillage manuel | Champ indépendant |
| Genou ATLAS (Royaume-Uni) | Frottement activé par le poids | Champ indépendant |
| Genou POF/OTRC (États-Unis) | Mono-axe avec ext. aider | Domaine |
| Genou DAV/Seattle (États-Unis) | Polycentrique conforme | Domaine |
| LIMBS International M1 genou (États-Unis) | Quatre barres | Domaine |
| JaipurKnee (Inde) | Quatre barres | Domaine |
| LCKnee (Canada) | Mono-axe avec verrouillage automatique | Domaine |
| Aucun fourni (Népal) | Mono-axe | Domaine |
| Aucun fourni (Nouvelle-Zélande) | Mono-axe rotomoulé | Domaine |
| Aucun fourni (Inde) | Six barres avec squat | Développement technique |
| Genou à friction (États-Unis) | Frottement activé par le poids | Développement technique |
| Genou Wedgelock (Australie) | Frottement activé par le poids | Développement technique |
| Genou à friction SATHI (Inde) | Frottement activé par le poids | Données limitées disponibles |
 Prothèses au-dessus du genou à faible coût : ICRC Knee (gauche) et LC Knee (droite)
Prothèses au-dessus du genou à faible coût : ICRC Knee (gauche) et LC Knee (droite)
Un plan de jambe artificielle à faible coût, conçu par Sébastien Dubois, a été présenté à l’exposition internationale de design et à la remise des prix de 2007 à Copenhague, au Danemark, où il a remporté le prix Index: Award . Il serait en mesure de créer une jambe prothétique à retour d’énergie pour 8,00 $ US , composée principalement de fibre de verre . [137]
Avant les années 1980, les prothèses de pied ne faisaient que restaurer les capacités de marche de base. Ces premiers dispositifs peuvent être caractérisés par une simple attache artificielle reliant son moignon au sol.
L’introduction du Seattle Foot (Seattle Limb Systems) en 1981 a révolutionné le domaine, mettant au premier plan le concept d’un pied prothétique à stockage d’énergie (ESPF). D’autres entreprises ont rapidement emboîté le pas, et peu de temps après, il y avait plusieurs modèles de prothèses à stockage d’énergie sur le marché. Chaque modèle utilisait une variation d’un talon compressible. Le talon est comprimé lors du contact initial avec le sol, emmagasinant de l’énergie qui est ensuite restituée lors de la dernière phase du contact avec le sol pour aider à propulser le corps vers l’avant.
Depuis lors, l’industrie des prothèses de pied a été dominée par de petites améliorations constantes en termes de performances, de confort et de qualité marchande.
Avec les imprimantes 3D , il est possible de fabriquer un seul produit sans avoir à disposer de moules en métal , ce qui permet de réduire drastiquement les coûts. [138]
Le pied de Jaipur , un membre artificiel de Jaipur , en Inde , coûte environ 40 dollars.
Prothèse robotique open-source
 “Hero Arm” sur le thème de Star Wars par Open Bionics
“Hero Arm” sur le thème de Star Wars par Open Bionics
Il existe actuellement un forum sur les prothèses à conception ouverte connu sous le nom de ” Open Prosthetics Project “. Le groupe emploie des collaborateurs et des bénévoles pour faire progresser la technologie des prothèses tout en essayant de réduire les coûts de ces dispositifs nécessaires. [139] La bionique ouverteest une entreprise qui développe des mains prothétiques robotisées open-source. Ils utilisent l’impression 3D pour fabriquer les dispositifs et les scanners 3D à faible coût pour les adapter au membre résiduel d’un patient spécifique. L’utilisation de l’impression 3D par Open Bionics permet des conceptions plus personnalisées, telles que le “Hero Arm” qui intègre les couleurs, les textures et même l’esthétique préférées des utilisateurs pour ressembler à des super-héros ou des personnages de Star Wars dans le but de réduire les coûts. Une étude sur une large gamme de mains prothétiques imprimées a révélé que bien que la technologie d’impression 3D soit prometteuse pour la conception de prothèses individualisées, et qu’elle soit moins chère que les prothèses commerciales disponibles sur le marché, elle est cependant plus chère que les processus de production de masse tels que le Moulage par injection. La même étude a également révélé que les preuves de la fonctionnalité,[140]
Des prothèses à petit prix pour les enfants
 Membres artificiels pour un jeune survivant de la thalidomide 1961-1965
Membres artificiels pour un jeune survivant de la thalidomide 1961-1965
Aux États-Unis, une estimation a été trouvée de 32 500 enfants (<21 ans) ayant subi une amputation pédiatrique majeure, avec 5 525 nouveaux cas chaque année, dont 3 315 congénitaux. [141]
Carr et al. (1998) ont étudié les amputations causées par les mines terrestres en Afghanistan, en Bosnie-Herzégovine, au Cambodge et au Mozambique chez les enfants (<14 ans), montrant des estimations de respectivement 4,7, 0,19, 1,11 et 0,67 pour 1000 enfants. [142] Mohan (1986) a indiqué en Inde un total de 424 000 amputés (23 500 par an), dont 10,3 % avaient un début d’invalidité avant l’âge de 14 ans, soit un total d’environ 43 700 enfants déficients des membres rien qu’en Inde. [143]
Peu de solutions à bas prix ont été créées spécialement pour les enfants. Voici des exemples de dispositifs prothétiques à faible coût :
Perche et béquille
Cette perche à main avec bande de soutien en cuir ou plate-forme pour le membre est l’une des solutions les plus simples et les moins chères trouvées. Il sert bien de solution à court terme, mais est sujet à la formation rapide de contractures si le membre n’est pas étiré quotidiennement à travers une série d’ensembles d’amplitude de mouvement (RoM). [68]
Branches en bambou, PVC ou plâtre
Cette solution également assez simple comprend une emboîture en plâtre avec un tuyau en bambou ou en PVC au fond, éventuellement fixé à un pied prothétique. Cette solution évite les contractures car le genou est déplacé sur toute sa ROM. La Collection David Werner, une base de données en ligne pour l’aide aux enfants handicapés du village, affiche des manuels de production de ces solutions. [144]
Branche de vélo réglable
Cette solution est construite en utilisant une tige de selle de vélo à l’envers comme pied, générant de la flexibilité et une possibilité de réglage (de la longueur). C’est une solution très bon marché, utilisant des matériaux disponibles localement. [145]
Membre Sathi
Il s’agit d’un membre inférieur modulaire endosquelettique d’Inde, qui utilise des pièces thermoplastiques. Ses principaux avantages sont le faible poids et l’adaptabilité. [68]
Monobranche
Les monomembres sont des prothèses non modulaires et nécessitent donc un prothésiste plus expérimenté pour un ajustement correct, car l’alignement peut à peine être modifié après la production. Cependant, leur durabilité est en moyenne meilleure que les solutions modulaires à faible coût. [146]
Perspectives de la théorie culturelle et sociale
Un certain nombre de théoriciens ont exploré la signification et les implications de l’extension prothétique du corps. Elizabeth Grosz écrit : « Les créatures utilisent des outils, des ornements et des appareils pour augmenter leurs capacités corporelles. Leur corps manque-t-il de quelque chose qu’il doit remplacer par des organes artificiels ou de substitution ?… Ou inversement, les prothèses doivent-elles être comprises en termes de réorganisation et prolifération esthétiques, comme conséquence d’une inventivité qui fonctionne au-delà et peut-être au mépris du besoin pragmatique ?” [147] Elaine Scarry soutient que chaque artefact recrée et étend le corps. Les chaises complètent le squelette, les outils ajoutent les mains, les vêtements augmentent la peau. [148]Dans la pensée de Scarry, “les meubles et les maisons ne sont ni plus ni moins intérieurs au corps humain que la nourriture qu’il absorbe, ni fondamentalement différents de prothèses aussi sophistiquées que les poumons, les yeux et les reins artificiels. La consommation de choses manufacturées transforme le corps à l’intérieur l’ouvrir à et comme la culture des objets.” [149] Mark Wigley , un professeur d’architecture, poursuit cette ligne de pensée sur la façon dont l’architecture complète nos capacités naturelles et soutient qu ‘«un flou d’identité est produit par toutes les prothèses». [150] Certains de ces travaux s’appuient sur la caractérisation antérieure de Freud de la relation de l’homme aux objets comme une relation d’extension.
Utilisateurs notables de prothèses
- Marie Moentmann (1900-1974), enfant survivante d’un accident du travail
- Terry Fox (1958-1981), athlète canadien, activiste humanitaire et de la recherche sur le cancer
- Oscar Pistorius (1986–), ancien sprinter professionnel sud-africain
Voir également
- Cœur artificiel
- Bionique
- Jambe de Capoue
- Cybernétique
- Cyborg
- Bras robotique
- Transhumanisme
- Émulation du cerveau entier
Références
Citations
- ^ πρόσθεσις . Liddell, Henry George ; Scott, Robert ; Un lexique grec-anglais au projet Perseus
- ^ Nathan, Stuart (28 novembre 2018). “L’implant prothétique fournit un mouvement réaliste du poignet aux amputés” . Récupéré le 30/01/2019 .
- ^ “Implants prothétiques – Membres prothétiques et parties du corps – Chirurgie plastique – Services AZ – Services” . www.royalfree.nhs.uk . Récupéré le 30/01/2019 .
- ^ un b “Comment le membre artificiel est fabriqué – matériel, fabrication, fabrication, utilisé, pièces, composants, structure, procédure” . www.madehow.com . Récupéré le 24/10/2017 .
- ^ “Équipe de médecine physique et de traitement de réadaptation” . Département de réadaptation et de médecine régénérative . Récupéré le 24/02/2019 .
- ^ “4 : Gestion des prothèses : vue d’ensemble, méthodes et matériaux | Bibliothèque virtuelle O&P” . www.oandplibrary.org . Récupéré le 24/10/2017 .
- ^ un b Maat, Bartjan; Smit, Gerwin ; Plettenburg, Dick; Breedveld, Paul (1er mars 2017). “Mains et outils prothétiques passifs : une revue de la littérature” . Prothèses et orthèses internationales . 42 (1): 66–74. doi : 10.1177/0309364617691622 . PMC 5810914 . PMID 28190380 .
- ^ un bc ” Obtenir une jambe artificielle – Cathy Johnson” . Société de radiodiffusion australienne . Récupéré le 03/10/2010 .
- ^ Highsmith, M. Jason; Andrews, Casey R.; Millman, Claire; Fuller, Ashley ; Kahle, Jason T.; Klenow, Tyler D.; Lewis, Katherine L.; Bradley, Rachel C.; Orriola, John J. (2016-09-16). “Interventions d’entraînement à la marche pour les amputés des membres inférieurs : une revue systématique de la littérature” . Technologie & Innovation . 18 (2–3): 99–113. doi : 10.21300/18.2-3.2016.99 . PMC 5218520 . PMID 28066520 .
- ^ un bc Barr , Steven; Howe, Tracey E. (2018). “La réhabilitation prothétique des personnes âgées dysvasculaires suite à une amputation transfémorale unilatérale” . La base de données Cochrane des revues systématiques . 2018 (10) : CD005260. doi : 10.1002/14651858.CD005260.pub4 . ISSN 1469-493X . PMC 6517199 . PMID 30350430 .
- ^ Bowker, John H.; En ligneMichael, John W. (2002). Atlas des prothèses de membre : principes chirurgicaux, prothétiques et de rééducation . Académie américaine des chirurgiens orthopédiques (2e éd.). Saint-Louis: Annuaire Mosby. pages 389, 413, 429, 479, 501, 535, 885. ISBN 978-0892032754. OCLC 54693136 .
- ^ un b Söderberg, Bengt (2001). Amputations partielles du pied (2e éd.). Suède : Centre pour les amputés partiels du pied. p. 21. ISBN 978-9163107566. OCLC 152577368 .
- ^ “Une Ménagerie Étonnante de Prothèses Animales” .
- ^ Pin, Keith R.; Sloan, Brian H.; Jacobs, Robert J. (2015). Prothèses oculaires cliniques . Springer. ISBN 9783319190570.
- ^ “N° 1705 : Un orteil vieux de 3000 ans” . Euh.edu. 2004-08-01 . Récupéré le 13/03/2013 .
- ^ Vanderwerker, Earl E., Jr. (1976). “Un bref examen de l’histoire des amputations et des prothèses” . ICIB . 15 (5): 15–16. Archivé de l’original le 14/10/2007. {{cite journal}}: CS1 maint: multiple names: authors list (link)
- ^ Rosenfeld, Amnon; Dvorachek, Michael; Rotstein, Ilan (juillet 2000). “Restaurations prothétiques en forme de couronne unique en bronze de dents de la période romaine tardive”. Journal des sciences archéologiques . 27 (7): 641–644. doi : 10.1006/jasc.1999.0517 .
- ^ Hérodote, Les Histoires . 9.37
- ^ “La Main de Fer du Goetz von Berlichingen” . Karlofgermany.com . Récupéré le 03/11/2009 .
- ^ Finch, Jacqueline (février 2011). “Les origines anciennes de la médecine prothétique”. Le Lancet . 377 (9765): 548–9. doi : 10.1016/s0140-6736(11)60190-6 . PMID 21341402 . S2CID 42637892 .
- ^ Bryce, Geore (1887). Une brève histoire du peuple canadien . Londres : S. Low, Marston, Searle & Rivington.
- ^ Friedman, Laurent (1978). La réhabilitation psychologique de l’amputé . Springfield, IL. : Charles C. Thomas.
- ^ Starr, Michelle. “Cet homme italien médiéval a remplacé sa main amputée par une arme” . AlerteScience . Récupéré le 17/04/2018 .
- ^ un micarelli b , je; Paine, R; Giostra, C; Tafuri, MA; Profico, A; Boggioni, M; Di Vincenzo, F; Massani, D; Papini, A; Manzi, G (31 décembre 2018). “Survie à l’amputation à l’ère pré-antibiotique: une étude de cas d’une nécropole lombarde (VIe-VIIIe siècles après JC)”. Journal des sciences anthropologiques . 96 (96): 185–200. doi : 10.4436/JASS.96001 . PMID 29717991 .
- ^ un b Killgrove, Kristina. “Les archéologues trouvent une ancienne prothèse de couteau-main sur un guerrier médiéval” . Forbes . Récupéré le 17/04/2018 .
- ^ “L’histoire des prothèses” . UNYQ . 2015-09-21 . Récupéré le 17/04/2018 .
- ^ Romm, Sharon (juillet 1989). “Armes par conception”. Chirurgie Plastique et Reconstructrice . 84 (1): 158–63. doi : 10.1097/00006534-198907000-00029 . PMID 2660173 .
- ^ “Une brève histoire des prothèses” . inMotion : Une brève histoire des prothèses . Novembre–décembre 2007 . Récupéré le 23 novembre 2010 .
- ^ Bigg, Henry Robert Heather (1885) Les membres artificiels et les amputations qui offrent les souches les plus appropriées en chirurgie civile et militaire . Londres
- ^ Long, Ivan A. (1985). “Prothèse au-dessus du genou à alignement normal de forme normale (NSNA) | Bibliothèque virtuelle O&P” . Prothèses et orthèses cliniques . 9 (4): 9–14.
- ^ Gottschalk, Frank A.; Kourosh, Sohrab ; Photos, Melvin ; McClellan, Bruce; Roberts, Jim (octobre 1989). “La configuration de la douille influence-t-elle la position du fémur dans l’amputation au-dessus du genou ?”. Journal des prothèses et orthèses . 2 (1): 94. doi : 10.1097/00008526-198910000-00009 .
- ^ “Histoire de la société Blatchford” , Groupe Blatchford.
- ^ un brochet b , Alvin (mai/juin 1999). “Les Nouvelles Prothèses High Tech”. Magazine InMotion 9 (3)
- ^ Un petit pas pour un amputé et un pas de géant pour Amparo et GDI Hub
- ^ Changer la prestation de services prothétiques avec Amparo
- ^ Johannes, Matthew S.; Bigelow, John D.; Burck, James M.; Harshbarger, Stuart D.; Kozlowski, Matthew V.; Van Doren, Thomas (2011). “Un aperçu du processus de développement du membre prothétique modulaire” (PDF) . Recueil technique Johns Hopkins APL . 30 (3): 207-216.
- ^ Adee, Sally (janvier 2009). “La révolution sera prothétisée” . Spectre IEEE . 46 (1): 44–8. doi : 10.1109/MSPEC.2009.4734314 . S2CID 34235585 .
- ^ Burck, James M.; Bigelow, John D.; En ligneHarshbarger, Stuart D. (2011). “Révolutionner les prothèses: défis et opportunités d’ingénierie des systèmes”. Recueil technique Johns Hopkins APL . 30 (3): 186–97. CiteSeerX 10.1.1.685.6772 .
- ^ Bogue, Robert (21 août 2009). “Exosquelettes et prothèses robotiques: un examen des développements récents”. Robot industriel . 36 (5): 421–427. doi : 10.1108/01439910910980141 .
- ^ Miranda, Robbin A.; Casebeer, William D.; Hein, Amy M.; Judy, Jack W.; Krotkov, Eric P.; Laabs, Tracy L.; Manzo, Justin E.; Pankratz, Kent G.; Pratt, Gill A.; Sanchez, Justin C.; Weber, Douglas J.; Wheeler, Tracey L.; Ling, Geoffrey SF (avril 2015). “Les efforts financés par la DARPA dans le développement de nouvelles technologies d’interface cerveau-ordinateur”. Tourillon des méthodes de neuroscience . 244 : 52–67. doi : 10.1016/j.jneumeth.2014.07.019 . PMID 25107852 . S2CID 14678623 .
- ^ “Le bras bionique du Pentagone” . Nouvelles de CBS . Récupéré le 9 mai 2015 .
- ^ “Prothèses personnalisées, membres artificiels LI, NY | O&P progressif” . Progoandp.com . Récupéré le 28/12/2016 .
- ^ un bc “Comment le membre artificiel est fabriqué – Contexte, Matières premières, Le processus de fabrication du membre artificiel, Physiothérapie, Contrôle de la qualité” . Madehow.com. 1988-04-04 . Récupéré le 03/10/2010 .
- ^ Mamalis, AG; Ramsden, JJ; Grabtchenko, AI ; Lytvynov, LA; Filipenko, Virginie ; Lavrynenko, SN (2006). “Un nouveau concept pour la fabrication d’endoprothèses individuelles de l’articulation de la hanche saphir-métallique”. Journal de physique biologique et de chimie . 6 (3): 113-117. doi : 10.4024/30601.jbpc.06.03 .
- ^ un b Suyi Yang, Eddie; Aslani, Navid ; McGarry, Anthony (octobre 2019). “Influences et tendances de diverses méthodes de capture de forme sur les résultats des prothèses trans-tibiales : une revue systématique” . Prothèses et orthèses internationales . 43 (5): 540–555. doi : 10.1177/0309364619865424 . ISSN 1746-1553 . PMID 31364475 . S2CID 198999869 .
- ^ Sharma, Hémant; Prabu, Dhanasekara (septembre 2013). “Plâtre de Paris : Passé, présent et futur” . Journal d’orthopédie clinique et de traumatologie . 4 (3): 107-109. doi : 10.1016/j.jcot.2013.09.004 . ISSN 0976-5662 . PMC 3880430 . PMID 26403547 .
- ^ Herbert, Nicolas; Simpson, David; Spence, William D.; Ion, William (mars 2005). “Une enquête préliminaire sur le développement de l’impression 3D d’emboîtures prothétiques” . Journal de recherche et développement en réadaptation . 42 (2): 141–146. doi : 10.1682/jrrd.2004.08.0134 . ISSN 1938-1352 . PMID 15944878 .
- ^ Sewell, P.; Noroozi, S.; Vinney, J.; Andrews, S. (août 2000). “Développements dans le processus d’ajustement de l’emboîture prothétique trans-tibiale : un examen des recherches passées et présentes” . Prothèses et orthèses internationales . 24 (2): 97–107. doi : 10.1080/03093640008726532 . ISSN 0309-3646 . PMID 11061196 . S2CID 20147798 .
- ^ Ribeiro, Danielle; Cimino, Stéphanie R.; Mayo, Amanda L.; Ratto, Matt ; Hitzig, Sander L. (2019-08-16). “Impression 3D et amputation : un examen de la portée” . Handicap et réadaptation : technologie d’assistance . 16 (2): 221–240. doi : 10.1080/17483107.2019.1646825 . ISSN 1748-3115 . PMID 31418306 . S2CID 201018681 .
- ^ Mak, AF; Zhang, M.; Boone, DA (mars 2001). “Recherche de pointe sur l’interface biomécanique-emboîture des prothèses des membres inférieurs : un bilan” . Journal de recherche et développement en réadaptation . 38 (2): 161-174. ISSN 0748-7711 . PMID 11392649 .
- ^ Rios Poveda, Alvaro (2002). Prothèses myoélectriques à rétroaction sensorielle . Symposium myoélectrique. ISBN 978-1-55131-029-9.
- ^ Raspopovic S1, Capogrosso M, Petrini FM; et coll. (janvier 2014). “Restaurer la rétroaction sensorielle naturelle dans les prothèses de main bidirectionnelles en temps réel”. Sci. Trad. Méd . 6 (222): 222. doi : 10.1126/scitranslmed.3006820 . PMID 24500407 . S2CID 206682721 . {{cite journal}}: CS1 maint: multiple names: authors list (link)
- ^ “Avec une nouvelle prothèse, les chercheurs ont réussi à restaurer le sens du toucher pour un homme du Danemark qui a perdu sa main gauche il y a neuf ans.” , USA Today , 5 février 2014
- ^ “La main artificielle offrant une réponse tactile immédiate est un succès” , Channelnewsasia , 7 février 2014
- ^ Del Viscio, Jeffery. “Une main de robot aide les amputés à “se sentir” à nouveau” . Scientifique américain . Récupéré le 12/06/2020 .
- ^ Smit G, Plettenburg DH (2010). “Efficacité des prothèses à fermeture volontaire de la main et du crochet” . Prothèses et orthèses internationales . 34 (4): 411–427. doi : 10.3109/03093646.2010.486390 . PMID 20849359 . S2CID 22327910 .
- ^ Smit, G; Bongers, RM; Van der Sluis, CK; Plettenburg, DH (2012). “Efficacité des prothèses à main et à crochet à ouverture volontaire : 24 ans de développement ?”. Journal de recherche et développement en réadaptation . 49 (4): 523–534. doi : 10.1682/JRRD.2011.07.0125 . PMID 22773256 .
- ^ Mains handicapées remplacées avec succès par des prothèses bioniques
- ^ Algorithme pour la reconstruction bionique de la main chez les patients atteints de plexopathies brachiales globales
- ^ Mains bioniques 3D
- ^ Une femme britannique peut faire du vélo pour la première fois avec «la main bionique la plus réaliste du monde»
- ^ Main robotique Bebionic
- ^ Un coup de main: des chercheurs de l’UE développent une main bionique qui imite la vie
- ^ Onken, Sarah. “Plongez dans” . cityviewnc.com . Archivé de l’original le 10 septembre 2015 . Récupéré le 24 août 2015 .
- ^ Éphraïm, PL; Dillingham, TR; Secteur, M ; Pezzin, LE; MacKenzie, EJ (2003). “Épidémiologie de perte de membre et d’insuffisance congénitale de membre : Une revue de la littérature”. Archives de médecine physique et de réadaptation . 84 (5): 747–61. doi : 10.1016/S0003-9993(02)04932-8 . PMID 12736892 .
- ^ Mak, AF; Zhang, M; Boone, DA (2001). “Recherche de pointe sur l’interface biomécanique-douille prothétique des membres inférieurs: une revue”. Journal de recherche et développement en réadaptation . 38 (2): 161–74. PMID 11392649 .
- ^ Legro, MW; Reiber, G; del Aguila, M; Ajax, MJ; Boone, DA; Larsen, JA; Smith, DG ; Sangeorzan, B (juillet 1999). “Problèmes d’importance signalés par les personnes amputées des membres inférieurs et les prothèses”. Journal de recherche et développement en réadaptation . 36 (3): 155–63. PMID 10659798 .
- ^ un bc Strait , E. (2006) Prothèses dans les pays en développement . oandp.org Récupéré le 11/03/2019
- ^ Stark, Gérald (2005). “Perspectives sur comment et pourquoi les pieds sont prescrits”. Journal des prothèses et orthèses . 17 : S18–S22. doi : 10.1097/00008526-200510001-00007 .
- ^ Jian, Yuancheng; Hiver, DA ; Ishac, MG ; Gilchrist, L (1993). “Trajectoire du corps COG et COP lors de l’initiation et de la fin de la marche”. Démarche et posture . 1 : 9–22. doi : 10.1016/0966-6362(93)90038-3 .
- ^ un b Andrysek, janvier (décembre 2010). “Technologies prothétiques des membres inférieurs dans le monde en développement: une revue de la littérature de 1994 à 2010”. Prothèses et orthèses internationales . 34 (4): 378–398. doi : 10.3109/03093646.2010.520060 . PMID 21083505 . S2CID 27233705 .
- ^ un b Hofstad, Cheriel J; van der Linde, Harmen; van Limbeek, Jacques; Postema, Klaas (26 janvier 2004). “Prescription des mécanismes prothétiques cheville-pied après amputation d’un membre inférieur” (PDF) . Base de données Cochrane des revues systématiques (1) : CD003978. doi : 10.1002/14651858.CD003978.pub2 . PMID 14974050 .
- ^ Andrysek, janvier; Naumann, Stephen; Cleghorn, William L. (décembre 2004). “Caractéristiques de conception des genoux prothétiques pédiatriques” . Transactions IEEE sur les systèmes neuronaux et l’ingénierie de la réadaptation . 12 (4): 369–378. doi : 10.1109/TNSRE.2004.838444 . ISSN 1534-4320 . PMID 15614992 . S2CID 1860735 .
- ^ Wyss, Dominik (2012-11-27). Évaluation et conception d’un mécanisme de genou prothétique à verrouillage arrière applicable à l’échelle mondiale (thèse de thèse).
- ^ a b R. Stewart et A. Staros, “Sélection et application des mécanismes du genou,” Bulletin of Prosthetics Research, vol. 18, pages 90-158, 1972.
- ^ M. Greene, “Analyse du genou à quatre barres”, Prosthetics and Orthotics International, vol. 37, pages 15-24, 1983.
- ^ “Le SLK, le genou d’auto-apprentissage” Archivé le 25/04/2012 à la Wayback Machine , DAW Industries. Récupéré le 16 mars 2008.
- ^ Marriott, Michel (2005-06-20). “Le titane et les capteurs remplacent la Jambe de bois d’Achab” . Le New York Times . Récupéré le 30/10/2008 .
- ^ Martin, Craig W. (novembre 2003) “Otto Bock C-leg: Un examen de son efficacité” Archivé le 28/12/2016 à la Wayback Machine . WCB Evidence Based Group
- ^ un b Kannenberg, Andreas; Zacharie, Britta ; Pröbsting, Eva (2014). “Avantages des genoux prothétiques contrôlés par microprocesseur pour les ambulateurs communautaires limités : examen systématique”. Journal de recherche et développement en réadaptation . 51 (10): 1469-1496. doi : 10.1682/JRRD.2014.05.0118 . PMID 25856664 .
- ^ Highsmith, M. Jason; Kahle, Jason T.; Bongiorni, Dennis R.; Sutton, Bryce S.; Groer, Shirley; Kaufman, Kenton R. (décembre 2010). “Sécurité, efficacité énergétique et rentabilité de la jambe C pour les amputés transfémoraux : une revue de la littérature”. Prothèses et orthèses internationales . 34 (4): 362–377. doi : 10.3109/03093646.2010.520054 . PMID 20969495 . S2CID 23608311 .
- ^ “Les amputés contrôlent les jambes bioniques avec leurs pensées” . Reuters . 20 mai 2015.
- ^ un bc Carey , Stephanie L.; Lura, Derek J.; Highsmith, M. Jason; CP.; FAAOP. (2015). “Différences dans les prothèses des membres supérieurs myoélectriques et actionnées par le corps: revue systématique de la littérature”. Journal de recherche et développement en réadaptation . 52 (3): 247–262. doi : 10.1682/JRRD.2014.08.0192 . PMID 26230500 .
- ^ Fédération internationale de génie médical et biologique (17 décembre 2012). “Congrès mondial de physique médicale et de génie biomédical” . IFMBE . Récupéré le 19 mars 2022 .
- ^ Rios, Alvaro (1997). Système de microcontrôleur pour prothèse myoélectrique avec rétroaction sensorielle . Congrès mondial de physique médicale et de génie biomédical : XVIII Conférence internationale sur le génie médical et biologique et XI Conférence internationale sur la physique médicale. Nice, France.
- ^ Wirta, RW; Taylor, DR ; Finley, FR (1978). “Prothèse de bras à reconnaissance de formes : une perspective historique – un rapport final” (PDF) . Bulletin de recherche sur les prothèses : 8–35. PMID 365281 .
- ^ Sherman, E. David (1964). « Une prothèse russe contrôlée par bioélectricité : rapport d’une équipe de recherche de l’Institut de réadaptation de Montréal » . Journal de l’Association médicale canadienne . 91 (24): 1268-1270. PMC 1927453 . PMID 14226106 .
- ^ Muzumdar, Ashok (2004). Prothèses motorisées des membres supérieurs : contrôle, mise en œuvre et application clinique . Springer. ISBN 978-3-540-40406-4.
- ^ Reinkensmeyer David J (2009). “Assistance robotique pour l’entraînement des membres supérieurs après un AVC” (PDF) . Études en technologie de la santé et informatique . 145 : 25–39. PMID 19592784 . Archivé de l’original (PDF) le 2016-12-28 . Récupéré le 28/12/2016 .
- ^ Kuiken TA, Miller LA, Lipschutz RD, Lock BA, Stubblefield K, Marasco PD, Zhou P, Dumanian GA (3 février 2007). “Réinnervation ciblée pour une fonction de bras prothétique améliorée chez une femme avec une amputation proximale: une étude de cas”. Lancette . 369 (9559): 371–80. doi : 10.1016/S0140-6736(07)60193-7 . PMID 17276777 . S2CID 20041254 .
- ^ “Blogs : blog des éditeurs TR : les patients testent un bras prothétique avancé” . Examen de la technologie . 2009-02-10 . Récupéré le 03/10/2010 .
- ^ “Bureau des sciences de la défense” . Darpa.mil. Archivé de l’original le 2009-04-26 . Récupéré le 03/10/2010 .
- ^ Binedell, Trevor; Meng, Eugène; Subburaj, Karupppasamy (2020-08-25). “Conception et développement d’un nouveau bras prothétique autobloquant non métallique imprimé en 3D pour une amputation du quartier avant” . Prothèses et orthèses internationales . 45 : 94–99. doi : 10.1177/0309364620948290 . ISSN 1746-1553 . PMID 32842869 . S2CID 221326246 .
- ^ “Proto 1 et Proto 2” . Ric.org. 2007-05-01. Archivé de l’original le 2011-07-27 . Récupéré le 03/10/2010 .
- ^ “Première mondiale de prothèse de bras contrôlée par les muscles et les nerfs” . Sciencedaily.com. Février 2013 . Récupéré le 28/12/2016 .
- ^ Williams, Adam (2012-11-30). “Un bras prothétique attaché en permanence contrôlé par l’esprit pourrait révolutionner les prothèses” . Gizmag.com . Récupéré le 28/12/2016 .
- ^ Ford, Jason (2012-11-28). “Essais imminents pour un bras robotique implantable contrôlé par la pensée” . L’ingénieur.co.uk . Récupéré le 28/12/2016 .
- ^ Li, Guanglin; Kuiken, Todd A (2008). “Modélisation du contrôle de la rotation des membres prothétiques par détection de la rotation de l’os résiduel du bras” . Transactions IEEE sur le génie biomédical . 55 (9): 2134-2142. doi : 10.1109/tbme.2008.923914 . PMC 3038244 . PMID 18713682 .
- ^ Contreras-Vidal José L.; et coll. (2012). « Restauration du mouvement du corps entier : vers un système d’interface cerveau-machine non invasif » . Impulsion IEEE . 3 (1): 34–37. doi : 10.1109/mpul.2011.2175635 . PMC 3357625 . PMID 22344949 .
- ^ “L’Institut de réadaptation de Chicago est le premier à développer une jambe robotique contrôlée par la pensée” . Medgadget.com. Septembre 2013 . Récupéré le 28/12/2016 .
- ^ Est-ce l’avenir des jambes robotiques ?
- ^ “Prothèses motorisées transtibiales” . Biomécatronique . Laboratoire des médias du MIT.
- ^ “Les jambes bioniques contrôlées par le cerveau sont enfin là” . Sciences populaires . Récupéré le 01/12/2018 .
- ^ Liacouras, Peter C.; Sahajwalla, Divya; Beachler, Mark D.; Sleeman, Todd; Ho, Vincent B.; En ligneLichtenberger, John P. (2017). “Utilisation de la tomodensitométrie et de l’impression 3D pour construire des attachements et des dispositifs prothétiques personnalisés” . L’impression 3D en médecine . 3 (1): 8. doi : 10.1186/s41205-017-0016-1 . ISSN 2365-6271 . PMC 5954798 . PMID 29782612 .
- ^ “Accueil – Technologies médicales BionX” . www.bionxmed.com . Récupéré le 08/01/2018 .
- ^ Össur. “PROPRIO PIED” . www.ossur.com . Récupéré le 08/01/2018 .
- ^ “Elan – Carbone, Pieds, Hydraulique – Endolite USA – Prothèses des membres inférieurs” . Endolite USA – Prothèses des membres inférieurs . Récupéré le 08/01/2018 .
- ^ Windrich, Michael; Grimmer, Martin; Christ, Olivier ; Rinderknecht, Stephan; Beckerle, Philipp (19 décembre 2016). “Prothèses actives des membres inférieurs : une revue systématique des problèmes de conception et des solutions” . Génie biomédical en ligne . 15 (S3) : 140. doi : 10.1186/s12938-016-0284-9 . PMC 5249019 . PMID 28105948 .
- ^ INGÉNIERIE.com. “Les chercheurs créent un système nerveux artificiel” . www.engineering.com . Récupéré le 08/06/2018 .
- ^ “Les chercheurs de Stanford créent un système nerveux artificiel pour les robots – Xinhua | English.news.cn” . www.xinhuanet.com . Récupéré le 08/06/2018 .
- ^ Université, Stanford (2018-05-31). “Un système nerveux artificiel donne aux prothèses et aux robots un sens du toucher | Stanford News” . Nouvelles de Stanford . Récupéré le 08/06/2018 .
- ^ “Prothèses abordables fabriquées à partir de déchets plastiques recyclés” . MaterialDistrict . 14 janvier 2019 . Récupéré le 3 novembre 2020 .
- ^ “Ces chercheurs transforment des bouteilles en plastique en membres prothétiques” . Forum économique mondial . 4 octobre 2019 . Récupéré le 3 novembre 2020 .
- ^ Bell, Sarah Jane (21 avril 2019). “Recycler des bouteilles de shampoing pour fabriquer des prothèses devient le rêve d’un coiffeur à la retraite” . ABC Nouvelles . Société de radiodiffusion australienne . Récupéré le 3 novembre 2020 .
- ^ Conway, Elle (26 juin 2019). “La famille Canberra transforme les bouchons de bouteilles en mains et bras en plastique pour les enfants” . ABC Nouvelles . Société de radiodiffusion australienne . Récupéré le 3 novembre 2020 .
- ^ “Envisagez les mains” . Envisagez . 19 février 2020 . Récupéré le 3 novembre 2020 .
- ^ Thomas, Daniel J.; Singh, Deepti (août 2020). “Impression 3D pour le développement de prothèses cosmétiques spécifiques au patient sur le lieu des soins” . International Journal of Surgery (Londres, Angleterre) . 80 : 241–242. doi : 10.1016/j.ijsu.2020.04.023 . ISSN 1743-9159 . PMID 32311524 . S2CID 216047962 .
- ^ Serruya MD, Kahana MJ (2008). “Techniques et dispositifs pour restaurer la cognition” . Behav Brain Res . 192 (2): 149–65. doi : 10.1016/j.bbr.2008.04.007 . PMC 3051349 . PMID 18539345 .
- ^ “Améliorations, Centre d’Oxford Uehiro pour l’éthique pratique” . Practicalethics.ox.ac.uk. Archivé de l’original le 2016-12-28 . Récupéré le 28/12/2016 .
- ^ Caplan, Arthur; Elliott, Carl (2004). “Est-il éthique d’utiliser des technologies d’amélioration pour nous rendre meilleurs que bien ?” . PLO Médecine . 1 (3) : e52. doi : 10.1371/journal.pmed.0010052 . PMC 539045 . PMID 15630464 .
- ^ Buchanan, Allen E. (2011). Au-delà de l’Humanité ? . doi : 10.1093/acprof:oso/9780199587810.001.0001 . ISBN 9780199587810.
- ^ Anomalie, Jonny (2012). “Au-delà de l’humanité? L’éthique de l’amélioration biomédicale – par Allen Buchanan”. Bioéthique . 26 (7): 391–392. doi : 10.1111/j.1467-8519.2012.01964.x .
- ^ Warwick K, Gasson M, Hutt B, Goodhew I, Kyberd P, Andrews B, Teddy P, Shad A (2003). “L’application de la technologie d’implant pour les systèmes cybernétiques”. Archives de Neurologie . 60 (10): 1369-1373. doi : 10.1001/archneur.60.10.1369 . PMID 14568806 .
- ^ Adée, Sarah (2008-02-01). “La prothèse “Luke Arm” de Dean Kamen se prépare pour les essais cliniques” . Spectre IEEE .
- ^ “Les préparations de prothèses de bras contrôlées par l’esprit de la DARPA pour le lancement commercial” .
- ^ Garner, Courtney (2019-04-05). “Interfaces de systèmes portables : comment intégrer des capteurs électroniques dans des prothèses imprimées en 3D améliorées ?” . SciTech Europe . Récupéré le 06/05/2019 .
- ^ Robert Klemko (10 août 2012), “Oscar Pistorius fait l’histoire, part sans médaille” , USA Today , archivé de l’original le 11 août 2012
- ^ Oscar Pistorius entre dans l’histoire olympique du 400 m à Londres 2012 , BBC Sport, 4 août 2012
- ^ Bill Chappell (4 août 2012), Oscar Pistorius entre dans l’histoire olympique sur 400 mètres et passe en demi-finale , NPR , archivé de l’original le 4 août 2012
- ^ “400m hommes – demi-finales” , london2012.com , archivé de l’original le 16 décembre 2012 , récupéré le 4 août 2012
- ^ Greenberg, Chris (10 août 2012), “Oscar Pistorius, l’équipe sud-africaine de relais 4 × 400 m termine 8e alors que les Bahamas remportent l’or” , Huffington Post , archivé de l’original le 10 août 2012
- ^ Hawking, Pistorius ouvrent les Jeux paralympiques de Londres : le physicien en fauteuil roulant Stephen Hawking a mis les athlètes au défi de “regarder les étoiles” en aidant à ouvrir des Jeux paralympiques record qui se dérouleront pendant 11 jours dans des salles presque à guichets fermés , Yahoo! Sports , 30 août 2012, archivé de l’original le 2 septembre 2012
- ^ un b “Coût d’un Membre Prothétique” . Cost Helper Santé . Récupéré le 13 avril 2015 .
- ^ “Le financement de votre prothèse” . Limbs4life . Limbs4life . Récupéré le 28 janvier 2018 .
- ^ “Cost of Prosthetics Stirs Debate” , Boston Globe , 5 juillet 2005. Récupéré le 11 février 2007.
- ^ “CICR : Prothèse trans-fémorale – Directives de fabrication” (PDF) . Récupéré le 03/10/2010 .
- ^ INDEX: 2007 INDEX: AWARD Archivé le 2 février 2009 à la Wayback Machine
- ^ Nagata, Kazuaki (2015-05-10). “La startup du bras robotique exploite les imprimantes 3D dans le but de rendre les prothèses abordables” . Le Japan Times en ligne . Japantimes.co.jp . Récupéré le 28/12/2016 .
- ^ “Ouvrir le site Web des prothèses” . Openprosthetics.org . Récupéré le 28/12/2016 .
- ^ dix Kate, Jelle; Smit, Gerwin ; Breedveld, Paul (2 février 2017). “Prothèses de membre supérieur imprimées en 3D : un bilan”. Handicap et réadaptation : technologie d’assistance . 12 (3): 300–314. doi : 10.1080/17483107.2016.1253117 . PMID 28152642 . S2CID 38036558 .
- ^ Krebs, DE; Edelstein, JE; Thornby, MA (1991). “Gestion prothétique des enfants présentant des déficiences des membres”. Thérapie physique . 71 (12): 920–34. doi : 10.1097/01241398-199205000-00033 . PMID 1946626 .
- ^ Carr, DB (1998). “Douleur et réadaptation suite à une blessure par mine terrestre” (PDF) . Mise à jour en anesthésie . 6 (2): 91.
- ^ Mohan, D. (1986) Un rapport sur les amputés en Inde . oandplibrary.org
- ^ Werner, David. Enfants handicapés du village . dinf.ne.jp
- ^ Cheng, V. (2004) Une solution d’assistance aux victimes . École de design industriel, Université Carleton.
- ^ Lee, Winson CC; Zhang, Ming (2005-08-01). “Conception d’un monolimbe à l’aide de la modélisation par éléments finis et de la méthode Taguchi basée sur les statistiques” (PDF) . Biomécanique clinique . 20 (7): 759–766. doi : 10.1016/j.clinbiomech.2005.03.015 . ISSN 0268-0033 . PMID 15963612 .
- ^ Grosz, Elizabeth (2003). “Objets prothétiques” dans L’état de l’architecture au début du XXIe siècle . p. 96–97. La Presse Monacelli. ISBN 1580931340 .
- ^ Scarry, Elaine (1985). Le corps en douleur : fabrication et déconstruction du monde . Presse universitaire d’Oxford.
- ^ Lupton et Miller (1992). « Streamlining : The Aesthetics of Waste » dans Taylor, M. et Preston, J. (eds.) 2006. Intimus : Interior Design Theory Reader . p. 204–212. ISBN 978-0-470-01570-4 .
- ^ Wigley, Mark (1991). “Théorie prothétique: la discipline de l’architecture”. Assemblage (15): 6–29. doi : 10.2307/3171122 . JSTOR 3171122 .
Sources
- Murdoch, George; Wilson, A. Bennett, Jr. (1997). Une introduction aux amputations et aux membres artificiels . États-Unis d’Amérique : Charles C Thomas Publisher, Ltd. pp. 3–31. ISBN 978-0-398-06801-1.
- “Biomécanique de la course à pied : des schémas de mouvement défectueux entraînent des blessures.” Bulletin des blessures sportives.
- Edelstein, JE Pieds prothétiques. État de l’art. Physiothérapie 68 (12) décembre 1988 : 1874–1881.
- Galey, Robert. La biomécanique de la course des amputés. Octobre 2002.
- Hafner BJ; Sanders JE; Czerniecki JM; En ligneFerguson J. (2002). “Dispositifs prothétiques transtibiaux de stockage et de retour d’énergie: un examen des concepts énergétiques et une nomenclature proposée”. Journal de recherche et développement en réadaptation . 39 (1): 1–11. PMID 11926321 .
Liens externes
| Recherchez la prothèse dans Wiktionary, le dictionnaire gratuit. |
| Wikimedia Commons a des médias liés aux prothèses . |
- Des amputés afghans racontent leur histoire lors d’un rassemblement au Texas , Fayetteville Observer
- Les prothèses modernes peuvent-elles réellement aider à retrouver le sens du toucher ? , PBS Newshour
- Un coup de main pour Rick , Fayetteville Observer
- Qu’est-ce qu’une prothèse, un membre prothétique et ses différents composants
- J’ai l’une des prothèses de bras les plus avancées au monde – et je déteste ça par Britt H. Young
- Une revue systématique d’essais contrôlés randomisés évaluant l’efficacité des interventions prothétiques et orthétiques