Produit croisé
En mathématiques , le produit croisé ou produit vectoriel (parfois produit d’aire dirigée , pour souligner sa signification géométrique) est une opération binaire sur deux vecteurs dans un Espace vectoriel euclidien orienté en trois dimensions (nommé ici E {displaystyle E} 

Si deux vecteurs ont la même direction ou ont la direction exactement opposée l’un à l’autre (c’est-à-dire qu’ils ne sont pas linéairement indépendants), ou si l’un ou l’autre a une longueur nulle, alors leur produit vectoriel est nul. [2] Plus généralement, la grandeur du produit est égale à l’aire d’un parallélogramme avec les vecteurs des côtés ; en particulier, la grandeur du produit de deux vecteurs perpendiculaires est le produit de leurs longueurs.
Le produit croisé est anticommutatif (c’est-à-dire a × b = − b × a ) et est distributif sur l’addition (c’est-à-dire a × ( b + c ) = a × b + a × c ). [1] L’espace E {displaystyle E}
Comme le produit scalaire, il dépend de la métrique de l’espace euclidien , mais contrairement au produit scalaire, il dépend également d’un choix d’ orientation (ou de « latéralité ») de l’espace (c’est pourquoi un espace orienté est nécessaire). En relation avec le produit croisé, le produit extérieur des vecteurs peut être utilisé dans des dimensions arbitraires (avec un résultat bivecteur ou 2-forme ) et est indépendant de l’orientation de l’espace.
Le produit peut être généralisé de différentes manières, en utilisant l’orientation et la structure métrique tout comme pour le produit croisé traditionnel à 3 dimensions, on peut, en n dimensions, prendre le produit de n – 1 vecteurs pour produire un vecteur perpendiculaire à tous . Mais si le produit se limite à des produits binaires non triviaux avec des résultats vectoriels, il n’existe qu’en trois et sept dimensions . [3] (Voir § Généralisations , ci-dessous, pour les autres dimensions.)
 Le produit vectoriel par rapport à un système de coordonnées droitier
Le produit vectoriel par rapport à un système de coordonnées droitier
Définition
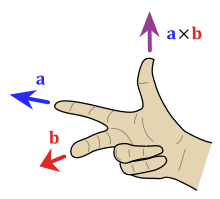 Trouver la direction du produit vectoriel par la règle de la main droite .
Trouver la direction du produit vectoriel par la règle de la main droite .
Le produit croisé de deux vecteurs a et b n’est défini que dans un espace tridimensionnel et est noté a × b . En physique et en mathématiques appliquées , la notation en coin a ∧ b est souvent utilisée (en conjonction avec le nom produit vectoriel ), [4] [5] [6] bien qu’en mathématiques pures une telle notation soit généralement réservée uniquement au produit extérieur, un abstraction du produit vectoriel à n dimensions.
Le produit croisé a × b est défini comme un vecteur c perpendiculaire (orthogonal) à la fois à a et b , avec une direction donnée par la règle de droite [1] et une amplitude égale à l’aire du parallélogramme que les vecteurs portée. [2]
Le produit vectoriel est défini par la formule [7] [8]
a × b = ‖ a ‖ ‖ b ‖ sin ( θ ) n {displaystyle mathbf {a} times mathbf {b} =left|mathbf {a} right|left|mathbf {b} right|sin(theta ) mathbf {n} } 
où:
- θ est l’ angle entre a et b dans le plan qui les contient (il est donc compris entre 0° et 180°)
- ‖ a ‖ et ‖ b ‖ sont les grandeurs des vecteurs a et b
- et n est un vecteur unitaire perpendiculaire au plan contenant a et b , dans la direction donnée par la règle de droite (illustrée). [2]
Si les vecteurs a et b sont parallèles (c’est-à-dire que l’angle θ entre eux est de 0° ou de 180°), selon la formule ci-dessus, le produit vectoriel de a et b est le vecteur nul 0 .
Direction
 Le produit croisé a × b (vertical, en violet) change lorsque l’angle entre les vecteurs a (bleu) et b (rouge) change. Le produit croisé est toujours orthogonal aux deux vecteurs et a une magnitude nulle lorsque les vecteurs sont parallèles et une magnitude maximale « a » « b » lorsqu’ils sont orthogonaux.
Le produit croisé a × b (vertical, en violet) change lorsque l’angle entre les vecteurs a (bleu) et b (rouge) change. Le produit croisé est toujours orthogonal aux deux vecteurs et a une magnitude nulle lorsque les vecteurs sont parallèles et une magnitude maximale « a » « b » lorsqu’ils sont orthogonaux.
Par convention, la direction du vecteur n est donnée par la règle de la main droite, où l’on pointe simplement l’index de la main droite dans la direction de a et le majeur dans la direction de b . Ensuite, le vecteur n sort du pouce (voir l’image ci-contre). L’utilisation de cette règle implique que le produit vectoriel est anti-Commutatif ; c’est-à-dire que b × a = −( a × b ) . En pointant d’abord l’index vers b , puis en pointant le majeur vers a, le pouce sera forcé dans la direction opposée, inversant le signe du vecteur produit.
Comme l’opérateur de produit croisé dépend de l’ orientation de l’espace (comme explicite dans la définition ci-dessus), le produit croisé de deux vecteurs n’est pas un “vrai” vecteur, mais un pseudovecteur . Voir § Transparence pour plus de détails.
Des noms
 Selon La règle de Sarrus , le déterminant d’une matrice 3×3 implique des multiplications entre les éléments de la matrice identifiés par des diagonales croisées
Selon La règle de Sarrus , le déterminant d’une matrice 3×3 implique des multiplications entre les éléments de la matrice identifiés par des diagonales croisées
En 1881, Josiah Willard Gibbs , et indépendamment Oliver Heaviside , ont introduit à la fois le produit scalaire et le produit croisé en utilisant respectivement un point ( a . b ) et un « x » ( a x b ). [9]
En 1877, pour souligner le fait que le résultat d’un produit scalaire est un scalaire alors que le résultat d’un produit croisé est un vecteur , William Kingdon Clifford a inventé les noms alternatifs de produit scalaire et de produit vectoriel pour les deux opérations. [9] Ces noms alternatifs sont encore largement utilisés dans la littérature.
La notation croisée ( a × b ) et le produit croisé du nom ont peut-être été inspirés par le fait que chaque composante scalaire de a × b est calculée en multipliant les composantes non correspondantes de a et b . Inversement, un produit scalaire a ⋅ b implique des multiplications entre les composantes correspondantes de a et b . Comme expliqué ci- dessous , le produit croisé peut être exprimé sous la forme d’un déterminant d’une matrice spéciale 3 × 3 . Selon La règle de Sarrus, il s’agit de multiplications entre éléments matriciels repérés par des diagonales croisées.
L’informatique
Notation des coordonnées
 Vecteurs de base standard ( i , j , k , également notés e 1 , e 2 , e 3 ) et composantes vectorielles de a ( a x , a y , a z , également notés a 1 , a 2 , a 3 )
Vecteurs de base standard ( i , j , k , également notés e 1 , e 2 , e 3 ) et composantes vectorielles de a ( a x , a y , a z , également notés a 1 , a 2 , a 3 )
Si ( i , j , k ) est une base orthonormée orientée positivement, les vecteurs de base vérifient les égalités suivantes [1]
i × j = k j × k = i k × i = j {displaystyle {begin{alignedat}{2}mathbf {color {blue}{i}} × mathbf {color {red}{j}} &&=mathbf {color {green}{ k}} \mathbf {color {rouge}{j}} × mathbf {color {vert}{k}} &&=mathbf {color {bleu}{i}} \mathbf {color {vert}{k}} × mathbf {color {bleu}{i}} &&=mathbf {color {rouge}{j}} end{alignedat}}} 
qui impliquent, par l’ Anticommutativité du produit croisé, que
j × i = − k k × j = − i i × k = − j {displaystyle {begin{alignedat}{2}mathbf {color {rouge}{j}} × mathbf {color {bleu}{i}} &&=-mathbf {color {vert} {k}} \mathbf {couleur {vert}{k}} × mathbf {couleur {rouge}{j}} &&=-mathbf {couleur {bleu}{i}} \ mathbf {color {bleu}{i}} × mathbf {color {vert}{k}} &&=-mathbf {color {rouge}{j}} end{alignedat}}} 
L’Anticommutativité du produit croisé (et le manque évident d’indépendance linéaire) implique également que
i × i = j × j = k × k = 0 {displaystyle mathbf {color {bleu}{i}} times mathbf {color {bleu}{i}} =mathbf {color {rouge}{j}} times mathbf {color { rouge}{j}} =mathbf {couleur {vert}{k}} times mathbf {couleur {vert}{k}} =mathbf {0} } 
Ces égalités, ainsi que la Distributivité et la linéarité du produit croisé (bien qu’aucune ne découle facilement de la définition donnée ci-dessus), sont suffisantes pour déterminer le produit croisé de deux vecteurs quelconques a et b . Chaque vecteur peut être défini comme la somme de trois composantes orthogonales parallèles aux vecteurs de base standard :
a = a 1 i + a 2 j + a 3 k b = b 1 i + b 2 j + b 3 k {displaystyle {begin{alignedat}{3}mathbf {a} &=a_{1}mathbf {color {blue}{i}} &&+a_{2}mathbf {color {red}{ j}} &&+a_{3}mathbf {couleur {vert}{k}} \mathbf {b} &=b_{1}mathbf {couleur {bleu}{i}} &&+b_{ 2}mathbf {color {rouge}{j}} &&+b_{3}mathbf {color {vert}{k}} end{alignedat}}} 
Leur produit croisé a × b peut être développé en utilisant la Distributivité :
a × b = ( a 1 i + a 2 j + a 3 k ) × ( b 1 i + b 2 j + b 3 k ) = a 1 b 1 ( i × i ) + a 1 b 2 ( i × j ) + a 1 b 3 ( i × k ) + a 2 b 1 ( j × i ) + a 2 b 2 ( j × j ) + a 2 b 3 ( j × k ) + a 3 b 1 ( k × i ) + a 3 b 2 ( k × j ) + a 3 b 3 ( k × k ) {displaystyle {begin{aligned}mathbf {a} times mathbf {b} ={}&(a_{1}mathbf {color {blue}{i}} +a_{2}mathbf {color {red}{j}} +a_{3}mathbf {color {green}{k}} )times (b_{1}mathbf {color {blue}{i}} +b_{2}mathbf {color {red}{j}} +b_{3}mathbf {color {green}{k}} )\={}&a_{1}b_{1}(mathbf {color {blue}{i}} times mathbf {color {blue}{i}} )+a_{1}b_{2}(mathbf {color {blue}{i}} times mathbf {color {red}{j}} )+a_{1}b_{3}(mathbf {color {blue}{i}} times mathbf {color {green}{k}} )+{}\&a_{2}b_{1}(mathbf {color {red}{j}} times mathbf {color {blue}{i}} )+a_{2}b_{2}(mathbf {color {red}{j}} times mathbf {color {red}{j}} )+a_{2}b_{3}(mathbf {color {red}{j}} times mathbf {color {green}{k}} )+{}\&a_{3}b_{1}(mathbf {color {green}{k}} times mathbf {color {blue}{i}} )+a_{3}b_{2}(mathbf {color {green}{k}} times mathbf {color {red}{j}} )+a_{3}b_{3}(mathbf {color {green}{k}} times mathbf {color {green}{k}} )\end{aligned}}} 
Cela peut être interprété comme la décomposition de a × b en la somme de neuf produits croisés plus simples impliquant des vecteurs alignés avec i , j ou k . Chacun de ces neuf produits croisés opère sur deux vecteurs faciles à manipuler car ils sont parallèles ou orthogonaux l’un à l’autre. De cette décomposition, en utilisant les égalités précitées et en collectant des termes similaires, on obtient :
a × b = a 1 b 1 0 + a 1 b 2 k − a 1 b 3 j − a 2 b 1 k + a 2 b 2 0 + a 2 b 3 i + a 3 b 1 j − a 3 b 2 i + a 3 b 3 0 = ( a 2 b 3 − a 3 b 2 ) i + ( a 3 b 1 − a 1 b 3 ) j + ( a 1 b 2 − a 2 b 1 ) k {displaystyle {begin{aligned}mathbf {a} times mathbf {b} ={}&quad a_{1}b_{1}mathbf {0} +a_{1}b_{2}mathbf {color {green}{k}} -a_{1}b_{3}mathbf {color {red}{j}} \&-a_{2}b_{1}mathbf {color {green}{k}} +a_{2}b_{2}mathbf {0} +a_{2}b_{3}mathbf {color {blue}{i}} \&+a_{3}b_{1}mathbf {color {red}{j}} -a_{3}b_{2}mathbf {color {blue}{i}} +a_{3}b_{3}mathbf {0} \={}&(a_{2}b_{3}-a_{3}b_{2})mathbf {color {blue}{i}} +(a_{3}b_{1}-a_{1}b_{3})mathbf {color {red}{j}} +(a_{1}b_{2}-a_{2}b_{1})mathbf {color {green}{k}} \end{aligned}}} 
ce qui signifie que les trois composantes scalaires du vecteur résultant s = s 1 i + s 2 j + s 3 k = a × b sont
s 1 = a 2 b 3 − a 3 b 2 s 2 = a 3 b 1 − a 1 b 3 s 3 = a 1 b 2 − a 2 b 1 {displaystyle {begin{aligned}s_{1}&=a_{2}b_{3}-a_{3}b_{2}\s_{2}&=a_{3}b_{1}-a_ {1}b_{3}\s_{3}&=a_{1}b_{2}-a_{2}b_{1}end{aligné}}} 
En utilisant des vecteurs colonnes , nous pouvons représenter le même résultat comme suit :
[ s 1 s 2 s 3 ] = [ a 2 b 3 − a 3 b 2 a 3 b 1 − a 1 b 3 a 1 b 2 − a 2 b 1 ] {displaystyle {begin{bmatrix}s_{1}\s_{2}\s_{3}end{bmatrix}}={begin{bmatrix}a_{2}b_{3}-a_{3 }b_{2}\a_{3}b_{1}-a_{1}b_{3}\a_{1}b_{2}-a_{2}b_{1}end{bmatrice}}} 
Notation matricielle
 Utilisation de La règle de Sarrus pour trouver le produit croisé de a et b
Utilisation de La règle de Sarrus pour trouver le produit croisé de a et b
Le produit croisé peut également être exprimé comme le déterminant formel : [note 1] [1]
a × b = | i j k a 1 a 2 a 3 b 1 b 2 b 3 | {displaystyle mathbf {atimes b} ={begin{vmatrix}mathbf {i} &mathbf {j} &mathbf {k} \a_{1}&a_{2}&a_{3} b_{1}&b_{2}&b_{3}\end{vmatrice}}} 
Ce déterminant peut être calculé à l’aide de La règle de Sarrus ou de l’ expansion des cofacteurs . En utilisant La règle de Sarrus, il s’étend à
a × b = ( a 2 b 3 i + a 3 b 1 j + a 1 b 2 k ) − ( a 3 b 2 i + a 1 b 3 j + a 2 b 1 k ) = ( a 2 b 3 − a 3 b 2 ) i + ( a 3 b 1 − a 1 b 3 ) j + ( a 1 b 2 − a 2 b 1 ) k . {displaystyle {begin{aligned}mathbf {atimes b} &=(a_{2}b_{3}mathbf {i} +a_{3}b_{1}mathbf {j} +a_{ 1}b_{2}mathbf {k} )-(a_{3}b_{2}mathbf {i} +a_{1}b_{3}mathbf {j} +a_{2}b_{1} mathbf {k} )\&=(a_{2}b_{3}-a_{3}b_{2})mathbf {i} +(a_{3}b_{1}-a_{1}b_ {3})mathbf {j} +(a_{1}b_{2}-a_{2}b_{1})mathbf {k} .end{aligned}}} 
En utilisant plutôt l’Expansion du cofacteur le long de la première ligne, il s’étend à [10]
a × b = | a 2 a 3 b 2 b 3 | i − | a 1 a 3 b 1 b 3 | j + | a 1 a 2 b 1 b 2 | k = ( a 2 b 3 − a 3 b 2 ) i − ( a 1 b 3 − a 3 b 1 ) j + ( a 1 b 2 − a 2 b 1 ) k , {displaystyle {begin{aligned}mathbf {atimes b} &={begin{vmatrix}a_{2}&a_{3}\b_{2}&b_{3}end{vmatrix}} mathbf {i} -{begin{vmatrix}a_{1}&a_{3}\b_{1}&b_{3}end{vmatrix}}mathbf {j} +{begin{vmatrix}a_{1 }&a_{2}\b_{1}&b_{2}end{vmatrice}}mathbf {k} \&=(a_{2}b_{3}-a_{3}b_{2}) mathbf {i} -(a_{1}b_{3}-a_{3}b_{1})mathbf {j} +(a_{1}b_{2}-a_{2}b_{1}) mathbf {k} ,end{aligné}}} 
qui donne directement les composantes du vecteur résultant.
Utilisation des tenseurs Levi-Civita
- Quelle que soit la base, le produit croisé a × b {displaystyle afois b}
est donnée par la formule tensorielle E i j k a i b j {displaystyle E_{ijk}a^{i}b^{j}}
où E i j k {displaystyle E_{ijk}}
est le tenseur covariant de Levi-Civita (on note la position des indices). Cela correspond à la formule intrinsèque donnée ici .
- Dans une base orthonormée ayant la même orientation que l’espace , a × b {displaystyle afois b}
est donnée par la formule pseudo-tensorielle ε i j k a i b j {displaystyle varepsilon _{ijk}a^{i}b^{j}}
où ε i j k {displaystyle varepsilon _{ijk}}
est le symbole Levi-Civita (qui est un pseudo-tenseur). C’est la formule utilisée pour la physique de tous les jours, mais elle ne fonctionne que pour ce choix particulier de base.
- Dans toute base orthonormée, a × b {displaystyle afois b}
est donnée par la formule pseudo-tensorielle ( − 1 ) B ε i j k a i b j {displaystyle (-1)^{B}varepsilon _{ijk}a^{i}b^{j}}
où ( − 1 ) B = ± 1 {displaystyle (-1)^{B}=pm 1}
indique si la base a la même orientation que l’espace ou non.







Cette dernière formule évite d’avoir à changer l’orientation de l’espace lorsqu’on inverse une base orthonormée.
Propriétés
Signification géométrique
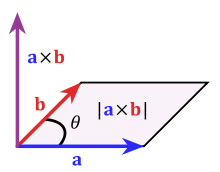 Figure 1. L’aire d’un parallélogramme comme amplitude d’un produit vectoriel
Figure 1. L’aire d’un parallélogramme comme amplitude d’un produit vectoriel  Figure 2. Trois vecteurs définissant un parallélépipède
Figure 2. Trois vecteurs définissant un parallélépipède
L’ amplitude du produit croisé peut être interprétée comme l’ aire positive du parallélogramme ayant a et b comme côtés (voir Figure 1) : [1]
‖ a × b ‖ = ‖ a ‖ ‖ b ‖ | sin θ | . {displaystyle left|mathbf {a} times mathbf {b} right|=left|mathbf {a} right|left|mathbf {b} right| left|sin theta right|.} 
En effet, on peut aussi calculer le volume V d’un parallélépipède ayant a , b et c comme arêtes en utilisant une combinaison d’un produit vectoriel et d’un produit scalaire, appelé Triple produit scalaire (voir Figure 2) :
a ⋅ ( b × c ) = b ⋅ ( c × a ) = c ⋅ ( a × b ) . {displaystyle mathbf {a} cdot (mathbf {b} times mathbf {c} )=mathbf {b} cdot (mathbf {c} times mathbf {a} )=mathbf { c} cdot (mathbf {a} times mathbf {b} ).} 
Le résultat du Triple produit scalaire pouvant être négatif, le volume du parallélépipède est donné par sa valeur absolue :
V = | a ⋅ ( b × c ) | . {displaystyle V=|mathbf {a} cdot (mathbf {b} times mathbf {c} )|.} 
Étant donné que l’amplitude du produit croisé correspond au sinus de l’angle entre ses arguments, le produit croisé peut être considéré comme une mesure de perpendicularité de la même manière que le produit scalaire est une mesure de parallélisme . Étant donné deux Vecteurs unitaires , leur produit croisé a une magnitude de 1 si les deux sont perpendiculaires et une magnitude de zéro si les deux sont parallèles. Le produit scalaire de deux Vecteurs unitaires se comporte juste de manière opposée : il est nul lorsque les Vecteurs unitaires sont perpendiculaires et 1 si les Vecteurs unitaires sont parallèles.
Les Vecteurs unitaires permettent deux identités pratiques : le produit scalaire de deux Vecteurs unitaires donne le cosinus (qui peut être positif ou négatif) de l’angle entre les deux Vecteurs unitaires. L’amplitude du produit croisé des deux Vecteurs unitaires donne le sinus (qui sera toujours positif).
Propriétés algébriques
 Multiplication scalaire par produit croisé . A gauche : Décomposition de b en composantes parallèles et perpendiculaires à a . A droite : mise à l’échelle des composantes perpendiculaires par un nombre réel positif r (si négatif, b et le produit croisé sont inversés).
Multiplication scalaire par produit croisé . A gauche : Décomposition de b en composantes parallèles et perpendiculaires à a . A droite : mise à l’échelle des composantes perpendiculaires par un nombre réel positif r (si négatif, b et le produit croisé sont inversés).  Distribution croisée des produits sur l’addition de vecteurs. A gauche : Les vecteurs b et c sont résolus en composantes parallèles et perpendiculaires à a . À droite : les composantes parallèles disparaissent dans le produit croisé, seules les composantes perpendiculaires représentées dans le plan perpendiculaire à un reste. [11]
Distribution croisée des produits sur l’addition de vecteurs. A gauche : Les vecteurs b et c sont résolus en composantes parallèles et perpendiculaires à a . À droite : les composantes parallèles disparaissent dans le produit croisé, seules les composantes perpendiculaires représentées dans le plan perpendiculaire à un reste. [11] 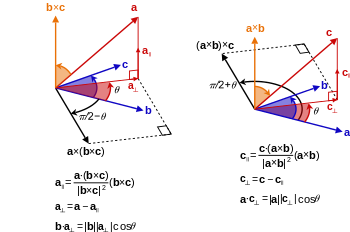 Les deux produits triples croisés non équivalents de trois vecteurs a , b , c . Dans chaque cas, deux vecteurs définissent un plan, l’autre est hors du plan et peut être divisé en composantes parallèles et perpendiculaires au produit croisé des vecteurs définissant le plan. Ces composants peuvent être trouvés par projection vectorielle et rejet . Le produit triple est dans le plan et est tourné comme indiqué.
Les deux produits triples croisés non équivalents de trois vecteurs a , b , c . Dans chaque cas, deux vecteurs définissent un plan, l’autre est hors du plan et peut être divisé en composantes parallèles et perpendiculaires au produit croisé des vecteurs définissant le plan. Ces composants peuvent être trouvés par projection vectorielle et rejet . Le produit triple est dans le plan et est tourné comme indiqué.
Si le produit croisé de deux vecteurs est le Vecteur zéro (c’est-à-dire a × b = 0 ), alors l’une ou les deux entrées est le Vecteur zéro, ( a = 0 ou b = 0 ) ou bien elles sont parallèles ou antiparallèle ( a ∥ b ) de sorte que le sinus de l’angle entre eux soit nul ( θ = 0° ou θ = 180° et sin θ = 0 ).
Le produit croisé d’un vecteur est le Vecteur zéro :
a × a = 0 . {displaystyle mathbf {a} times mathbf {a} =mathbf {0} .} 
Le produit vectoriel est anticommutatif ,
a × b = − ( b × a ) , {displaystyle mathbf {a} times mathbf {b} =-(mathbf {b} times mathbf {a} ),} 
distributif sur addition,
a × ( b + c ) = ( a × b ) + ( a × c ) , {displaystyle mathbf {a} times (mathbf {b} +mathbf {c} )=(mathbf {a} times mathbf {b} )+(mathbf {a} times mathbf { c} ),} 
et compatible avec la multiplication scalaire de sorte que
( r a ) × b = a × ( r b ) = r ( a × b ) . {displaystyle (r,mathbf {a} )times mathbf {b} =mathbf {a} times (r,mathbf {b} )=r,(mathbf {a} times mathbf {b} ).} 
Il n’est pas Associatif , mais satisfait l ‘ identité Jacobi :
a × ( b × c ) + b × ( c × a ) + c × ( a × b ) = 0 . {displaystyle mathbf {a} times (mathbf {b} times mathbf {c} )+mathbf {b} times (mathbf {c} times mathbf {a} )+mathbf {c} times (mathbf {a} times mathbf {b} )=mathbf {0} .} 
La Distributivité, la linéarité et l’identité de Jacobi montrent que l’ espace vectoriel R 3 avec l’addition vectorielle et le produit croisé forme une algèbre de Lie , l’algèbre de Lie du groupe orthogonal réel en 3 dimensions, SO(3) . Le produit croisé n’obéit pas à la loi d’annulation ; c’est-à-dire que a × b = a × c avec a ≠ 0 n’implique pas b = c , mais seulement que :
0 = ( a × b ) − ( a × c ) = a × ( b − c ) . {displaystyle {begin{aligned}mathbf {0} &=(mathbf {a} times mathbf {b} )-(mathbf {a} times mathbf {c} )\&= mathbf {a} times (mathbf {b} -mathbf {c} ).\end{aligned}}} 
Cela peut être le cas où b et c s’annulent, mais en plus où a et b − c sont parallèles ; c’est-à-dire qu’ils sont liés par un facteur d’échelle t , conduisant à :
c = b + t a , {displaystyle mathbf {c} =mathbf {b} +t,mathbf {a} ,} 
pour un certain scalaire t .
Si, en plus de a × b = a × c et a ≠ 0 comme ci-dessus, c’est le cas que a ⋅ b = a ⋅ c alors
a × ( b − c ) = 0 a ⋅ ( b − c ) = 0 , {displaystyle {begin{aligned}mathbf {a} times (mathbf {b} -mathbf {c} )&=mathbf {0} \mathbf {a} cdot (mathbf {b } -mathbf {c} )&=0,end{aligné}}} 
Comme b − c ne peut pas être simultanément parallèle (pour que le produit croisé soit 0 ) et perpendiculaire (pour que le produit scalaire soit 0) à a , il faut que b et c s’annulent : b = c .
D’après la définition géométrique, le produit croisé est invariant sous des rotations propres autour de l’axe défini par a × b . Dans les formules :
( R a ) × ( R b ) = R ( a × b ) {displaystyle (Rmathbf {a} )times (Rmathbf {b} )=R(mathbf {a} times mathbf {b} )} 


Plus généralement, le produit croisé obéit à l’identité suivante sous les transformations matricielles :
( M a ) × ( M b ) = ( det M ) ( M − 1 ) T ( a × b ) = cof M ( a × b ) {displaystyle (Mmathbf {a} )times (Mmathbf {b} )=(det M)left(M^{-1}right)^{mathrm {T} }(mathbf {a} times mathbf {b} )=nomopérateur {cof} M(mathbf {a} times mathbf {b} )} 
où M {displaystyle M} 


Le produit croisé de deux vecteurs se situe dans l’ espace nul de la matrice 2 × 3 avec les vecteurs en lignes :
a × b ∈ N S ( [ a b ] ) . {displaystyle mathbf {a} times mathbf {b} in NSleft({begin{bmatrix}mathbf {a} \mathbf {b} end{bmatrix}}right).} 
Pour la somme de deux produits croisés, l’identité suivante est vérifiée :
a × b + c × d = ( a − c ) × ( b − d ) + a × d + c × b . {displaystyle mathbf {a} times mathbf {b} +mathbf {c} times mathbf {d} =(mathbf {a} -mathbf {c} )times (mathbf {b} -mathbf {d} )+mathbf {a} times mathbf {d} +mathbf {c} times mathbf {b} .} 
Différenciation
La règle du produit du calcul différentiel s’applique à toute opération bilinéaire, et donc également au produit vectoriel :
d d t ( a × b ) = d a d t × b + a × d b d t , {displaystyle {frac {d}{dt}}(mathbf {a} times mathbf {b} )={frac {dmathbf {a} }{dt}}times mathbf {b} +mathbf {a} times {frac {dmathbf {b} }{dt}},} 
où a et b sont des vecteurs qui dépendent de la variable réelle t .
Triple extension de produit
Le produit croisé est utilisé dans les deux formes du produit triple. Le Triple produit scalaire de trois vecteurs est défini comme
a ⋅ ( b × c ) , { displaystyle mathbf {a} cdot ( mathbf {b} fois mathbf {c} ),} 
C’est le volume signé du parallélépipède avec les arêtes a , b et c et en tant que tel, les vecteurs peuvent être utilisés dans n’importe quel ordre qui est une permutation paire de l’ordre ci-dessus. Sont donc égaux :
a ⋅ ( b × c ) = b ⋅ ( c × a ) = c ⋅ ( a × b ) , {displaystyle mathbf {a} cdot (mathbf {b} times mathbf {c} )=mathbf {b} cdot (mathbf {c} times mathbf {a} )=mathbf { c} cdot (mathbf {a} times mathbf {b} ),} 
Le produit vectoriel triple est le produit croisé d’un vecteur avec le résultat d’un autre produit croisé, et est lié au produit scalaire par la formule suivante
a × ( b × c ) = b ( c ⋅ a ) − c ( a ⋅ b ) ( a × b ) × c = b ( c ⋅ a ) − a ( b ⋅ c ) {displaystyle {begin{aligned}mathbf {a} times (mathbf {b} times mathbf {c} )=mathbf {b} (mathbf {c} cdot mathbf {a}) -mathbf {c} (mathbf {a} cdot mathbf {b} )\(mathbf {a} times mathbf {b} )times mathbf {c} =mathbf {b} ( mathbf {c} cdot mathbf {a} )-mathbf {a} (mathbf {b} cdot mathbf {c} )end{aligné}}} 
Le mnémonique “BAC moins CAB” est utilisé pour se souvenir de l’ordre des vecteurs dans le membre de droite. Cette formule est utilisée en physique pour simplifier les calculs vectoriels. Un cas particulier, concernant les gradients et utile en calcul vectoriel , est
∇ × ( ∇ × f ) = ∇ ( ∇ ⋅ f ) − ( ∇ ⋅ ∇ ) f = ∇ ( ∇ ⋅ f ) − ∇ 2 f , {displaystyle {begin{aligned}nabla times (nabla times mathbf {f} )&=nabla (nabla cdot mathbf {f})-(nabla cdot nabla )mathbf {f} \&=nabla (nabla cdot mathbf {f} )-nabla ^{2}mathbf {f} ,\end{aligned}}} 
où ∇ 2 est l’ opérateur vectoriel Laplacien .
D’autres identités relient le produit croisé au Triple produit scalaire :
( a × b ) × ( a × c ) = ( a ⋅ ( b × c ) ) a ( a × b ) ⋅ ( c × d ) = b T ( ( c T a ) I − c a T ) d = ( a ⋅ c ) ( b ⋅ d ) − ( a ⋅ d ) ( b ⋅ c ) {displaystyle {begin{aligned}(mathbf {a} times mathbf {b} )times (mathbf {a} times mathbf {c} )&=(mathbf {a} cdot ( mathbf {b} times mathbf {c} ))mathbf {a} \(mathbf {a} times mathbf {b} )cdot (mathbf {c} times mathbf {d} )&=mathbf {b} ^{mathrm {T} }left(left(mathbf {c} ^{mathrm {T} }mathbf {a} right)I-mathbf {c} mathbf {a} ^{mathrm {T} }right)mathbf {d} \&=(mathbf {a} cdot mathbf {c} )(mathbf {b} cdot mathbf { d} )-(mathbf {a} cdot mathbf {d} )(mathbf {b} cdot mathbf {c} )end{aligné}}} 
où I est la matrice identité.
Formulation alternative
Le produit croisé et le produit scalaire sont liés par :
‖ a × b ‖ 2 = ‖ a ‖ 2 ‖ b ‖ 2 − ( a ⋅ b ) 2 . {displaystyle left|mathbf {a} times mathbf {b} right|^{2}=left|mathbf {a} right|^{2}left| mathbf {b} right|^{2}-(mathbf {a} cdot mathbf {b} )^{2}.} 
Le membre de droite est le déterminant de Gram de a et b , le carré de l’aire du parallélogramme défini par les vecteurs. Cette condition détermine l’amplitude du produit croisé. À savoir, puisque le produit scalaire est défini, en termes d’angle θ entre les deux vecteurs, comme :
a ⋅ b = ‖ a ‖ ‖ b ‖ cos θ , {displaystyle mathbf {acdot b} =left|mathbf {a} right|left|mathbf {b} right|cos theta ,} 
la relation donnée ci-dessus peut être réécrite comme suit :
‖ a × b ‖ 2 = ‖ a ‖ 2 ‖ b ‖ 2 ( 1 − cos 2 θ ) . {displaystyle left|mathbf {atimes b} right|^{2}=left|mathbf {a} right|^{2}left|mathbf {b} right|^{2}left(1-cos ^{2}theta right).} 
En invoquant l’ identité trigonométrique de Pythagore, on obtient :
‖ a × b ‖ = ‖ a ‖ ‖ b ‖ | sin θ | , {displaystyle left|mathbf {a} times mathbf {b} right|=left|mathbf {a} right|left|mathbf {b} right| left|sin theta right|,} 
qui est la grandeur du produit croisé exprimée en fonction de θ , égale à l’aire du parallélogramme défini par a et b (voir définition ci-dessus).
La combinaison de cette exigence et de la propriété selon laquelle le produit croisé est orthogonal à ses constituants a et b fournit une définition alternative du produit croisé. [12]
L’identité de Lagrange
La relation:
‖ a × b ‖ 2 ≡ det [ a ⋅ a a ⋅ b a ⋅ b b ⋅ b ] ≡ ‖ a ‖ 2 ‖ b ‖ 2 − ( a ⋅ b ) 2 . {displaystyle left|mathbf {a} times mathbf {b} right|^{2}equiv det {begin{bmatrix}mathbf {a} cdot mathbf {a} & mathbf {a} cdot mathbf {b} \mathbf {a} cdot mathbf {b} &mathbf {b} cdot mathbf {b} \end{bmatrice}}equiv gauche|mathbf {a} droite|^{2}gauche|mathbf {b} droite|^{2}-(mathbf {a} cdot mathbf {b} )^{ 2}.} 
peut être comparée à une autre relation faisant intervenir le membre de droite, à savoir l’identité de Lagrange exprimée par : [13]
∑ 1 ≤ i < j ≤ n ( a i b j − a j b i ) 2 ≡ ‖ a ‖ 2 ‖ b ‖ 2 − ( a ⋅ b ) 2 , {displaystyle sum _{1leq i<jleq n}left(a_{i}b_{j}-a_{j}b_{i}right)^{2}equiv left| mathbf {a} right|^{2}left|mathbf {b} right|^{2}-(mathbf {acdot b} )^{2} ,} 
où a et b peuvent être des vecteurs à n dimensions. Cela montre également que la forme volumique riemannienne pour les surfaces est exactement l’ élément de surface du calcul vectoriel. Dans le cas où n = 3 , la combinaison de ces deux équations donne l’expression de l’amplitude du produit vectoriel en fonction de ses composantes : [14]
‖ a × b ‖ 2 ≡ ∑ 1 ≤ i < j ≤ 3 ( a i b j − a j b i ) 2 ≡ ( a 1 b 2 − b 1 a 2 ) 2 + ( a 2 b 3 − a 3 b 2 ) 2 + ( a 3 b 1 − a 1 b 3 ) 2 . {displaystyle {begin{aligned}&left|mathbf {a} times mathbf {b} right|^{2}equiv sum _{1leq i<jleq 3} left(a_{i}b_{j}-a_{j}b_{i}right)^{2}\equiv {}&left(a_{1}b_{2}-b_{1} a_{2}droite)^{2}+gauche(a_{2}b_{3}-a_{3}b_{2}droite)^{2}+gauche(a_{3}b_{1 }-a_{1}b_{3}right)^{2} .end{aligné}}} 
Le même résultat est trouvé directement en utilisant les composants du produit croisé trouvé à partir de:
a × b ≡ det [ i ^ j ^ k ^ a 1 a 2 a 3 b 1 b 2 b 3 ] . {displaystyle mathbf {a} times mathbf {b} equiv det {begin{bmatrix}{hat {mathbf {i} }}&{hat {mathbf {j} }}&{ hat {mathbf {k} }}\a_{1}&a_{2}&a_{3}\b_{1}&b_{2}&b_{3}\end{bmatrix}}.} 
Dans R 3 , l’équation de Lagrange est un cas particulier de la multiplicativité | vw | = | v || w | de la norme dans l’ algèbre des quaternions .
C’est un cas particulier d’une autre formule, aussi parfois appelée identité de Lagrange, qui est le cas tridimensionnel de l’ identité Binet–Cauchy : [15] [16]
( a × b ) ⋅ ( c × d ) ≡ ( a ⋅ c ) ( b ⋅ d ) − ( a ⋅ d ) ( b ⋅ c ) . {displaystyle (mathbf {a} times mathbf {b} )cdot (mathbf {c} times mathbf {d} )equiv (mathbf {a} cdot mathbf {c} )( mathbf {b} cdot mathbf {d} )-(mathbf {a} cdot mathbf {d} )(mathbf {b} cdot mathbf {c} ).} 
Si a = c et b = d , cela simplifie la formule ci-dessus.
Générateurs infinitésimaux de rotations
Le produit croisé décrit commodément les générateurs infinitésimaux de rotations dans R 3 . Plus précisément, si n est un vecteur unitaire dans R 3 et R ( φ , n ) désigne une rotation autour de l’axe passant par l’origine spécifiée par n , avec un angle φ (mesuré en radians, dans le sens antihoraire vu de la pointe de n ), alors
d d φ | φ = 0 R ( φ , n ) x = n × x {displaystyle left.{d over dphi }right|_{phi =0}R(phi ,{boldsymbol {n}}){boldsymbol {x}}={boldsymbol {n }}times {boldsymbol {x}}} 
pour tout vecteur x dans R 3 . Le produit croisé avec n décrit donc le générateur infinitésimal des rotations autour de n . Ces générateurs infinitésimaux forment l’ algèbre de Lie so (3) du groupe de rotation SO(3) , et on obtient le résultat que l’algèbre de Lie R 3 avec produit vectoriel est isomorphe à l’algèbre de Lie so (3).
Méthodes alternatives de calcul
Conversion en multiplication matricielle
Le produit croisé vectoriel peut également être exprimé comme le produit d’une matrice asymétrique et d’un vecteur : [15]
a × b = [ a ] × b = [ 0 − a 3 a 2 a 3 0 − a 1 − a 2 a 1 0 ] [ b 1 b 2 b 3 ] a × b = [ b ] × T a = [ 0 b 3 − b 2 − b 3 0 b 1 b 2 − b 1 0 ] [ a 1 a 2 a 3 ] , {displaystyle {begin{aligned}mathbf {a} times mathbf {b} =[mathbf {a} ]_{times}mathbf {b} &={begin{bmatrix},0& !-a_{3}&,,a_{2}\,,a_{3}&0&!-a_{1}\-a_{2}&,,a_{1} &,0end{bmatrix}}{begin{bmatrix}b_{1}\b_{2}\b_{3}end{bmatrix}}\mathbf {a} times mathbf { b} ={[mathbf {b} ]_{times }}^{mathrm {!!T} }mathbf {a} &={begin{bmatrice},0&,,b_ {3}&!-b_{2}\-b_{3}&0&,,b_{1}\,,b_{2}&!-b_{1}&,0 end{bmatrix}}{begin{bmatrix}a_{1}\a_{2}\a_{3}end{bmatrix}},end{aligned}}} ![{displaystyle {begin{aligned}mathbf {a} times mathbf {b} =[mathbf {a} ]_{times }mathbf {b} &={begin{bmatrix},0&!-a_{3}&,,a_{2}\,,a_{3}&0&!-a_{1}\-a_{2}&,,a_{1}&,0end{bmatrix}}{begin{bmatrix}b_{1}\b_{2}\b_{3}end{bmatrix}}\mathbf {a} times mathbf {b} ={[mathbf {b} ]_{times }}^{mathrm {!!T} }mathbf {a} &={begin{bmatrix},0&,,b_{3}&!-b_{2}\-b_{3}&0&,,b_{1}\,,b_{2}&!-b_{1}&,0end{bmatrix}}{begin{bmatrix}a_{1}\a_{2}\a_{3}end{bmatrix}},end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/77eaf3e139944a22bc3543de85a65d2d280547c6)
![{displaystyle [mathbf {a} ]_{times }{stackrel {rm {def}}{=}}{begin{bmatrix},,0&!-a_{3}&,,,a_{2}\,,,a_{3}&0&!-a_{1}\!-a_{2}&,,a_{1}&,,0end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/614cc7fd18f2f2e212803822f31acb2505c98c89)
Les colonnes [ a ] ×,i de la matrice antisymétrique pour un vecteur a peuvent également être obtenues en calculant le produit vectoriel avec les Vecteurs unitaires . C’est,
[ a ] × , i = a × e ^ i , i ∈ { 1 , 2 , 3 } {displaystyle [mathbf {a} ]_{times ,i}=mathbf {a} times mathbf {{hat {e}}_{i}} ,;iin {1, 2,3}} ![{displaystyle [mathbf {a} ]_{times ,i}=mathbf {a} times mathbf {{hat {e}}_{i}} ,;iin {1,2,3}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/74baaa1f6814e02fb133911b2bbab966485a3806)
![{displaystyle [mathbf {a} ]_{times }=sum _{i=1}^{3}left(mathbf {a} times mathbf {{hat {e}}_{i}} right)otimes mathbf {{hat {e}}_{i}} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fb0381c1581881a166e2f4e9cefe0b236265eefd)

De plus, si a est lui-même exprimé sous la forme d’un produit vectoriel :
a = c × d {displaystyle mathbf {a} =mathbf {c} times mathbf {d} } 
![{displaystyle [mathbf {a} ]_{times }=mathbf {d} mathbf {c} ^{mathrm {T} }-mathbf {c} mathbf {d} ^{mathrm {T} }.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d7bebe8181aeb49a3e8987339594fd7de7c454a9)
L’évaluation du produit croisé donne
a = c × d = ( c 2 d 3 − c 3 d 2 c 3 d 1 − c 1 d 3 c 1 d 2 − c 2 d 1 ) {displaystyle mathbf {a} =mathbf {c} times mathbf {d} ={begin{pmatrix}c_{2}d_{3}-c_{3}d_{2}\c_{3 }d_{1}-c_{1}d_{3}\c_{1}d_{2}-c_{2}d_{1}end{pmatrix}}} 
![{displaystyle [mathbf {a} ]_{times }={begin{bmatrix}0&c_{2}d_{1}-c_{1}d_{2}&c_{3}d_{1}-c_{1}d_{3}\c_{1}d_{2}-c_{2}d_{1}&0&c_{3}d_{2}-c_{2}d_{3}\c_{1}d_{3}-c_{3}d_{1}&c_{2}d_{3}-c_{3}d_{2}&0end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ff95aa2908dc95252f1a28c8a9167458c98c993)



Ce résultat peut être généralisé à des dimensions supérieures en utilisant l’algèbre géométrique . En particulier, dans n’importe quelle dimension, les bivecteurs peuvent être identifiés avec des matrices asymétriques, de sorte que le produit entre une matrice asymétrique et un vecteur est équivalent à la partie de grade 1 du produit d’un bivecteur et d’un vecteur. [17] En trois dimensions, les bivecteurs sont duels aux vecteurs, de sorte que le produit est équivalent au produit croisé, avec le bivecteur au lieu de son vecteur dual. Dans des dimensions plus élevées, le produit peut toujours être calculé mais les bivecteurs ont plus de degrés de liberté et ne sont pas équivalents aux vecteurs. [17]
Cette notation est aussi souvent beaucoup plus facile à travailler, par exemple en géométrie épipolaire .
Des propriétés générales du produit vectoriel découle immédiatement que
[ a ] × a = 0 {displaystyle [mathbf {a} ]_{fois },mathbf {a} =mathbf {0} } ![{displaystyle [mathbf {a} ]_{times },mathbf {a} =mathbf {0} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e918b623a3b34134199284e350a5a06f8fe0305)
![{displaystyle mathbf {a} ^{mathrm {T} },[mathbf {a} ]_{times }=mathbf {0} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/3cd1a98ffd5ab228553c458345bb26af8422bb43)
![{displaystyle mathbf {b} ^{mathrm {T} },[mathbf {a} ]_{times },mathbf {b} =0.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c23cfb35b83ca69742e7da1381a7477a18d04e4d)
L’expansion du triple produit mentionnée ci-dessus (règle bac-cab) peut être facilement prouvée à l’aide de cette notation.
Comme mentionné ci-dessus, l’algèbre de Lie R 3 avec produit croisé est isomorphe à l’algèbre de Lie so(3) , dont les éléments peuvent être identifiés avec les matrices antisymétriques 3×3. L’application a → [ a ] × fournit un isomorphisme entre R 3 et so(3) . Sous cette carte, le produit croisé de 3 vecteurs correspond au commutateur des matrices asymétriques 3×3.
| Conversion matricielle pour produit croisé avec vecteurs de base canoniques |
|---|
Dénotant avec e i ∈ R 3 × 1 {displaystyle mathbf {e} _{i}in mathbf {R} ^{3fois 1}}  la i {displaystyle i} la i {displaystyle i}  -ème vecteur de base canonique, le produit croisé d’un vecteur générique v ∈ R 3 × 1 {displaystyle mathbf {v} in mathbf {R} ^{3fois 1}} -ème vecteur de base canonique, le produit croisé d’un vecteur générique v ∈ R 3 × 1 {displaystyle mathbf {v} in mathbf {R} ^{3fois 1}}  avec e i {displaystyle mathbf {e} _{i}} avec e i {displaystyle mathbf {e} _{i}}  est donné par: v × e i = C i v {displaystyle mathbf {v} times mathbf {e} _{i}=mathbf {C} _{i}mathbf {v} } est donné par: v × e i = C i v {displaystyle mathbf {v} times mathbf {e} _{i}=mathbf {C} _{i}mathbf {v} }  , où C 1 = [ 0 0 0 0 0 1 0 − 1 0 ] , C 2 = [ 0 0 − 1 0 0 0 1 0 0 ] , C 3 = [ 0 1 0 − 1 0 0 0 0 0 ] {displaystyle mathbf {C} _{1}={begin{bmatrix}0&0&0\0&0&1\0&-1&0end{bmatrix}},quad mathbf {C} _{2}={begin {bmatrice}0&0&-1\0&0&0\1&0&0end{bmatrice}},quad mathbf {C} _{3}={begin{bmatrice}0&1&0\-1&0&0\0&0&0end{bmatrice} }} , où C 1 = [ 0 0 0 0 0 1 0 − 1 0 ] , C 2 = [ 0 0 − 1 0 0 0 1 0 0 ] , C 3 = [ 0 1 0 − 1 0 0 0 0 0 ] {displaystyle mathbf {C} _{1}={begin{bmatrix}0&0&0\0&0&1\0&-1&0end{bmatrix}},quad mathbf {C} _{2}={begin {bmatrice}0&0&-1\0&0&0\1&0&0end{bmatrice}},quad mathbf {C} _{3}={begin{bmatrice}0&1&0\-1&0&0\0&0&0end{bmatrice} }} 
Ces matrices partagent les propriétés suivantes :
La matrice de projection orthogonale d’un vecteur v ≠ 0 {displaystyle mathbf {v} neq mathbf {0} } P e 1 ⊥ = [ 0 0 0 0 1 0 0 0 1 ] , P e 2 ⊥ = [ 1 0 0 0 0 0 0 0 1 ] , P e 3 ⊥ = [ 1 0 0 0 1 0 0 0 0 ] {displaystyle mathbf {P} _{mathbf {e} _{1}}^{^{perp }}={begin{bmatrix}0&0&0\0&1&0\0&0&1end{bmatrix}}, quad mathbf {P} _{mathbf {e} _{2}}^{^{perp }}={begin{bmatrix}1&0&0\0&0&0\0&0&1end{bmatrix}},quad mathbf {P} _{mathbf {e} _{3}}^{^{perp }}={begin{bmatrix}1&0&0\0&1&0\0&0&0end{bmatrix}}} Pour d’autres propriétés des matrices de projection orthogonales, voir projection (algèbre linéaire) . |









Notation d’index pour les tenseurs
Le produit croisé peut également être défini en termes de tenseur de Levi-Civita E ijk et d’un produit scalaire η mi , qui sont utiles pour convertir la notation vectorielle pour les applications tensorielles :
c = a × b ⇔ c m = ∑ i = 1 3 ∑ j = 1 3 ∑ k = 1 3 η m i E i j k a j b k {displaystyle mathbf {c} =mathbf {atimes b} Leftrightarrow c^{m}=sum _{i=1}^{3}sum _{j=1}^{3} sum _{k=1}^{3}eta ^{mi}E_{ijk}a^{j}b^{k}} 
où les indices i , j , k {displaystyle i,j,k} 
c = a × b ⇔ c m = η m i E i j k a j b k {displaystyle mathbf {c} =mathbf {atimes b} Leftrightarrow c^{m}=eta ^{mi}E_{ijk}a^{j}b^{k}} 
dans laquelle les indices répétés sont additionnés sur les valeurs 1 à 3.
Dans une base orthonormée orientée positivement η mi = δ mi (le delta de Kronecker ) et E i j k = ε i j k {displaystyle E_{ijk}=varepsilon _{ijk}} 
[ ε i j k a j ] = [ a ] × . {displaystyle [varepsilon _{ijk}a^{j}]=[mathbf {a} ]_{times }.} ![{displaystyle [varepsilon _{ijk}a^{j}]=[mathbf {a} ]_{times }.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/063b837f18afcf9a012a49f73f4b4c2e350e99e9)
En mécanique classique : représenter le produit croisé en utilisant le symbole Levi-Civita peut rendre évidentes les symétries mécaniques lorsque les systèmes physiques sont isotropes . (Un exemple: considérons une particule dans un potentiel de la loi de Hooke dans trois espaces, libre d’osciller en trois dimensions; aucune de ces dimensions n’est «spéciale» dans aucun sens, donc les symétries résident dans le moment cinétique représenté par le produit croisé , qui sont mis en évidence par la représentation de Levi-Civita précitée). [ citation nécessaire ]
Mnémonique
 Mnémonique pour calculer un produit vectoriel sous forme vectorielle
Mnémonique pour calculer un produit vectoriel sous forme vectorielle
Le mot “xyzzy” peut être utilisé pour rappeler la définition du produit croisé.
Si
a = b × c {displaystyle mathbf {a} =mathbf {b} times mathbf {c} } 
où:
a = [ a x a y a z ] , b = [ b x b y b z ] , c = [ c x c y c z ] {displaystyle mathbf {a} ={begin{bmatrix}a_{x}\a_{y}\a_{z}end{bmatrix}}, mathbf {b} ={begin{bmatrix }b_{x}\b_{y}\b_{z}end{bmatrice}}, mathbf {c} ={begin{bmatrice}c_{x}\c_{y}\c_ {z}end{bmatrice}}} 
alors:
a x = b y c z − b z c y {displaystyle a_{x}=b_{y}c_{z}-b_{z}c_{y}} 


Les deuxième et troisième équations peuvent être obtenues à partir de la première en faisant simplement pivoter verticalement les indices, x → y → z → x . Le problème, bien sûr, est de savoir comment se souvenir de la première équation, et deux options sont disponibles à cet effet : soit se souvenir des deux diagonales pertinentes du schéma de Sarrus (celles contenant i ), soit se souvenir de la suite xyzzy.
Étant donné que la première diagonale du schéma de Sarrus n’est que la diagonale principale de la matrice 3 × 3 mentionnée ci- dessus , les trois premières lettres du mot xyzzy peuvent être très facilement mémorisées.
Visualisation croisée
De manière similaire au dispositif mnémonique ci-dessus, une “croix” ou X peut être visualisée entre les deux vecteurs de l’équation. Cela peut être utile pour se souvenir de la bonne formule de produit croisé.
Si
a = b × c {displaystyle mathbf {a} =mathbf {b} times mathbf {c} }
alors:
a = [ b x b y b z ] × [ c x c y c z ] . {displaystyle mathbf {a} ={begin{bmatrix}b_{x}\b_{y}\b_{z}end{bmatrix}}times {begin{bmatrix}c_{x} c_{y}\c_{z}end{bmatrice}}.} 
Si nous voulons obtenir la formule de a x {displaystyle a_{x}} 


a x = [ b y b z ] × [ c y c z ] . {displaystyle a_{x}={begin{bmatrix}b_{y}\b_{z}end{bmatrix}}times {begin{bmatrix}c_{y}\c_{z}end {bmatrice}}.} 
Lorsque vous faites cela pour a y {displaystyle a_{y}} 

a y = [ b z b x ] × [ c z c x ] , a z = [ b x b y ] × [ c x c y ] {displaystyle a_{y}={begin{bmatrix}b_{z}\b_{x}end{bmatrix}}times {begin{bmatrix}c_{z}\c_{x}end {bmatrix}}, a_{z}={begin{bmatrix}b_{x}\b_{y}end{bmatrix}}times {begin{bmatrix}c_{x}\c_{y }end{bmatrice}}} 
Pour a x {displaystyle a_{x}}
a x = b y c z − b z c y . {displaystyle a_{x}=b_{y}c_{z}-b_{z}c_{y}.} 
Nous pouvons procéder de la même manière pour a y {displaystyle a_{y}}
Applications
Le produit croisé a des applications dans divers contextes. Par exemple, il est utilisé dans la géométrie computationnelle, la physique et l’ingénierie. Une liste non exhaustive d’exemples suit.
Géométrie computationnelle
Le produit croisé apparaît dans le calcul de la distance de deux lignes obliques (lignes qui ne sont pas dans le même plan) l’une de l’autre dans un espace tridimensionnel.
Le produit croisé peut être utilisé pour calculer la normale d’un triangle ou d’un polygone, une opération fréquemment effectuée en infographie . Par exemple, l’enroulement d’un polygone (dans le sens des aiguilles d’une montre ou dans le sens inverse des aiguilles d’une montre) autour d’un point à l’intérieur du polygone peut être calculé en triangulant le polygone (comme les rayons d’une roue) et en additionnant les angles (entre les rayons) à l’aide du produit croisé pour suivre le signe de chaque angle.
En géométrie computationnelle du plan , le produit croisé est utilisé pour déterminer le signe de l’ angle aigu défini par trois points p 1 = ( x 1 , y 1 ) , p 2 = ( x 2 , y 2 ) {displaystyle p_{1}=(x_{1},y_{1}),p_{2}=(x_{2},y_{2})} 



P = ( x 2 − x 1 ) ( y 3 − y 1 ) − ( y 2 − y 1 ) ( x 3 − x 1 ) , {displaystyle P=(x_{2}-x_{1})(y_{3}-y_{1})-(y_{2}-y_{1})(x_{3}-x_{1}) ,} 
qui est la longueur signée du produit croisé des deux vecteurs.
Dans le repère “droitier”, si le résultat est 0, les points sont colinéaires ; s’il est positif, les trois points constituent un angle de rotation positif autour de p 1 {displaystyle p_{1}} 




Le produit croisé est utilisé dans le calcul du volume d’un polyèdre tel qu’un tétraèdre ou un parallélépipède .
Moment angulaire et couple
Le moment cinétique L d’une particule autour d’une origine donnée est défini par :
L = r × p , {displaystyle mathbf {L} =mathbf {r} times mathbf {p} ,} 
où r est le vecteur de position de la particule par rapport à l’origine, p est la quantité de mouvement linéaire de la particule.
De même, le moment M d’une force F B appliquée au point B autour du point A est donné par :
M A = r A B × F B {displaystyle mathbf {M} _{mathrm {A} }=mathbf {r} _{mathrm {AB} }times mathbf {F} _{mathrm {B}},} 
En mécanique, le moment d’une force est aussi appelé couple et s’écrit τ {displaystyle mathbf {tau } } 
Puisque la position r , le moment linéaire p et la force F sont tous de vrais vecteurs, le moment cinétique L et le moment d’une force M sont des pseudovecteurs ou des vecteurs axiaux .
Corps rigide
Le produit croisé apparaît fréquemment dans la description des mouvements rigides. Deux points P et Q sur un corps rigide peuvent être liés par :
v P − v Q = ω × ( r P − r Q ) {displaystyle mathbf {v} _{P}-mathbf {v} _{Q}={boldsymbol {omega}}times left(mathbf {r} _{P}-mathbf {r } _{Q}droite),} 
où r {displaystyle mathbf {r}} 


Depuis le poste r {displaystyle mathbf {r}}
Force de Lorentz
Le produit croisé est utilisé pour décrire la force de Lorentz subie par une charge électrique en mouvement q e :
F = q e ( E + v × B ) {displaystyle mathbf {F} =q_{e}left(mathbf {E} +mathbf {v} times mathbf {B} right)} 
Puisque la vitesse v , la force F et le champ électrique E sont tous de vrais vecteurs, le champ magnétique B est un pseudovecteur .
Autre
Dans le calcul vectoriel , le produit croisé est utilisé pour définir la formule de l’ opérateur vectoriel curl .
L’astuce de réécrire un produit croisé en termes de multiplication matricielle apparaît fréquemment en géométrie épipolaire et multi-vues, en particulier lors de la dérivation de contraintes d’appariement.
En tant que produit externe
 Le produit vectoriel par rapport au produit extérieur. En rouge sont le vecteur unitaire orthogonal et le bivecteur unitaire “parallèle”.
Le produit vectoriel par rapport au produit extérieur. En rouge sont le vecteur unitaire orthogonal et le bivecteur unitaire “parallèle”.
Le produit croisé peut être défini en termes de produit extérieur. Elle peut être généralisée à un produit externe dans d’autres dimensions que trois. [18] Cette vue [ laquelle ? ] permet une interprétation géométrique naturelle du produit croisé. En algèbre extérieure, le produit extérieur de deux vecteurs est un bivecteur. Un bivecteur est un élément plan orienté, de la même manière qu’un vecteur est un élément linéaire orienté. Étant donné deux vecteurs a et b , on peut voir le bivecteur a ∧ b comme le parallélogramme orienté enjambé par a et b. Le produit croisé est alors obtenu en prenant l’ étoile de Hodge du bivecteur a ∧ b , en faisant correspondre 2-vecteurs aux vecteurs :
a × b = ⋆ ( a ∧ b ) . {displaystyle atimes b=star (awedge b),.} 
Cela peut être considéré comme l’élément multidimensionnel orienté “perpendiculaire” au bivecteur. Ce n’est qu’en trois dimensions que le résultat est un élément unidimensionnel orienté – un vecteur – alors que, par exemple, en quatre dimensions, le dual de Hodge d’un bivecteur est bidimensionnel – un bivecteur. Ainsi, ce n’est qu’en trois dimensions qu’un produit croisé vectoriel de a et b peut être défini comme le vecteur dual du bivecteur a ∧ b : il est perpendiculaire au bivecteur, avec une orientation dépendant de la sensibilité du système de coordonnées, et a la même amplitude relative au vecteur normal unitaire comme a ∧ b par rapport au bivecteur unitaire ; précisément les propriétés décrites ci-dessus.
Droitier
| Apprendre encore plus Cette section contient peut -être des recherches originales . ( septembre 2021 ) Please improve it by verifying the claims made and adding inline citations. Statements consisting only of original research should be removed. (Learn how and when to remove this template message) |
Cohérence
Lorsque les lois de la physique sont écrites sous forme d’équations, il est possible de faire un choix arbitraire du système de coordonnées, y compris la latéralité. Il faut faire attention à ne jamais écrire une équation où les deux côtés ne se comportent pas de la même manière sous toutes les transformations à prendre en compte. Par exemple, si un côté de l’équation est un produit croisé de deux vecteurs polaires , il faut tenir compte du fait que le résultat est un vecteur axial . Par conséquent, pour des raisons de cohérence, l’autre côté doit également être un vecteur axial. [ citation nécessaire ]Plus généralement, le résultat d’un produit vectoriel peut être soit un vecteur polaire, soit un vecteur axial, selon le type de ses opérandes (vecteurs polaires ou vecteurs axiaux). À savoir, les vecteurs polaires et les vecteurs axiaux sont interdépendants des manières suivantes sous l’application du produit croisé :
- vecteur polaire × vecteur polaire = vecteur axial
- vecteur axial × vecteur axial = vecteur axial
- vecteur polaire × vecteur axial = vecteur polaire
- vecteur axial × vecteur polaire = vecteur polaire
ou symboliquement
- polaire × polaire = axial
- axiale × axiale = axiale
- polaire × axiale = polaire
- axial × polaire = polaire
Étant donné que le produit croisé peut également être un vecteur polaire, il peut ne pas changer de direction avec une transformation d’image miroir. Cela se produit, selon les relations ci-dessus, si l’un des opérandes est un vecteur polaire et l’autre est un vecteur axial (par exemple, le produit croisé de deux vecteurs polaires). Par exemple, un triple produit vectoriel impliquant trois vecteurs polaires est un vecteur polaire.
Une approche sans mains est possible en utilisant l’algèbre extérieure.
Le paradoxe de la base orthonormée
Soit ( i , j , k ) une base orthonormée. Les vecteurs i , j et k ne dépendent pas de l’orientation de l’espace. Ils peuvent même être définis en l’absence de toute orientation. Ils ne peuvent donc pas être des vecteurs axiaux. Mais si i et j sont des vecteurs polaires alors k est un vecteur axial pour i × j = k ou j × i = k . C’est un paradoxe.
“Axial” et “polaire” sont des qualificatifs physiques pour les vecteurs physiques ; c’est-à-dire des vecteurs qui représentent des grandeurs physiques telles que la vitesse ou le champ magnétique. Les vecteurs i , j et k sont des vecteurs mathématiques, ni axiaux ni polaires. En mathématiques, le produit croisé de deux vecteurs est un vecteur. Il n’y a aucune contradiction.
Généralisations
Il existe plusieurs façons de généraliser le produit croisé à des dimensions supérieures.
Algèbre de Lie
Le produit croisé peut être considéré comme l’un des produits de Lie les plus simples, et est donc généralisé par les algèbres de Lie , qui sont axiomatisées comme des produits binaires satisfaisant les axiomes de multilinéarité, d’asymétrie et de l’identité de Jacobi. De nombreuses algèbres de Lie existent, et leur étude est un domaine majeur des mathématiques, appelé théorie de Lie .
Par exemple, l’ algèbre de Heisenberg donne une autre structure d’algèbre de Lie sur R 3 . {displaystyle mathbf {R} ^{3}.} 

![{displaystyle [x,y]=z,[x,z]=[y,z]=0.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bf27588f0b4586bd6a22e7e3d7c9d8513219e3ea)
Quaternions
Le produit croisé peut également être décrit en termes de quaternions . En général, si un vecteur [ a 1 , a 2 , a 3 ] est représenté par le quaternion a 1 i + a 2 j + a 3 k , le produit croisé de deux vecteurs peut être obtenu en prenant leur produit comme quaternions et en supprimant la partie réelle du résultat. La partie réelle sera le négatif du produit scalaire des deux vecteurs.
Octonions
Un produit croisé pour les vecteurs à 7 dimensions peut être obtenu de la même manière en utilisant les octonions au lieu des quaternions. La non-existence de produits croisés non triviaux à valeurs vectorielles de deux vecteurs dans d’autres dimensions est liée au résultat du théorème de Hurwitz selon lequel les seules algèbres de division normées sont celles de dimension 1, 2, 4 et 8.
Produit extérieur
En dimension générale, il n’y a pas d’analogue direct du produit croisé binaire qui donne spécifiquement un vecteur. Il y a cependant le produit extérieur, qui a des propriétés similaires, sauf que le produit extérieur de deux vecteurs est maintenant un 2-vecteur au lieu d’un vecteur ordinaire. Comme mentionné ci-dessus, le produit croisé peut être interprété comme le produit extérieur en trois dimensions en utilisant l’opérateur étoile de Hodge pour mapper 2 vecteurs sur des vecteurs. Le dual de Hodge du produit extérieur donne un ( n – 2) -vecteur, qui est une généralisation naturelle du produit croisé dans n’importe quel nombre de dimensions.
Le produit extérieur et le produit scalaire peuvent être combinés (par sommation) pour former le produit géométrique en algèbre géométrique.
Produit externe
Comme mentionné ci-dessus, le produit croisé peut être interprété en trois dimensions comme le dual de Hodge du produit extérieur. Dans toute dimension n finie , le dual de Hodge du produit extérieur de n – 1 vecteurs est un vecteur. Ainsi, au lieu d’une opération binaire, en dimensions finies arbitraires, le produit croisé est généralisé comme le dual de Hodge du produit extérieur de certains n – 1 vecteurs donnés. Cette généralisation est appelée produit externe . [19]
Produit de collecteur
Interpréter l’ espace vectoriel tridimensionnel de l’algèbre comme la sous-algèbre à 2 vecteurs (et non le vecteur 1) de l’ algèbre géométrique à trois dimensions, où i = e 2 e 3 {displaystyle mathbf {i} =mathbf {e_{2}} mathbf {e_{3}} } 




A × B = 1 2 ( A B − B A ) {displaystyle Atimes B={tfrac {1}{2}}(AB-BA)} 
où A B {displaystyle AB} 
Le produit du commutateur pourrait être généralisé à des multivecteurs arbitraires en trois dimensions, ce qui donne un multivecteur composé uniquement d’éléments de grades 1 (1-vecteurs/ vrais vecteurs ) et 2 (2-vecteurs/pseudovecteurs). Alors que le produit du commutateur de deux vecteurs 1 est en effet le même que le produit extérieur et donne un vecteur 2, le commutateur d’un vecteur 1 et d’un vecteur 2 donne un vrai vecteur, correspondant plutôt aux contractions gauche et droite dans algèbre géométrique. Le produit du commutateur de deux 2-vecteurs n’a pas de produit équivalent correspondant, c’est pourquoi le produit du commutateur est défini en premier lieu pour les 2-vecteurs. De plus, le triple produit du commutateur de trois 2 vecteurs est le même que levecteur triple produit des trois mêmes pseudovecteurs en algèbre vectorielle. Cependant, le triple produit du commutateur de trois vecteurs 1 en algèbre géométrique est plutôt le négatif du triple produit vectoriel des trois mêmes vrais vecteurs en algèbre vectorielle.
Les généralisations à des dimensions supérieures sont fournies par le même produit de commutateur de 2 vecteurs dans des algèbres géométriques de dimension supérieure, mais les 2 vecteurs ne sont plus des pseudovecteurs. Tout comme le produit du commutateur/produit croisé des 2 vecteurs en trois dimensions correspond à l’algèbre de Lie la plus simple , les sous-algèbres à 2 vecteurs de l’algèbre géométrique de dimension supérieure équipées du produit du commutateur correspondent également aux algèbres de Lie. [21] De plus, comme en trois dimensions, le produit du commutateur pourrait être davantage généralisé à des multivecteurs arbitraires.
Algèbre multilinéaire
Dans le contexte de l’ algèbre multilinéaire , le produit croisé peut être vu comme le tenseur (1,2) (un tenseur mixte , en particulier une carte bilinéaire ) obtenu à partir de la forme volumique tridimensionnelle , [note 2] a (0,3 )-tenseur, en élevant un index .
Dans le détail, la forme volumique tridimensionnelle définit un produit V × V × V → R , { displaystyle V fois V fois V à mathbf {R} ,} 




En traduisant l’algèbre ci-dessus en géométrie, la fonction “volume du parallélépipède défini par ( a , b , − ) {displaystyle (a,b,-)} 


De la même manière, en dimension supérieure, on peut définir des produits croisés généralisés en élevant des indices de la forme volumique à n dimensions, qui est un ( 0 , n ) {displaystyle (0,n)} 
- un ( 1 , n − 1 ) {displaystyle (1,n-1)}
-tenseur, qui prend en entrée n − 1 {displaystyle n-1}
vecteurs, et donne en sortie 1 vecteur – un ( n − 1 ) {displaystyle (n-1)}
produit à valeur vectorielle -ary, ou
- un ( n − 2 , 2 ) {displaystyle (n-2,2)}
-tenseur, qui prend en entrée 2 vecteurs et donne en sortie un tenseur antisymétrique de rang n − 2 – un produit binaire de rang n − 2 valeurs de tenseur. On peut aussi définir ( k , n − k ) {displaystyle (k,nk)}
-tenseurs pour les autres k .



Ces produits sont tous multilinéaires et antisymétriques, et peuvent être définis en termes de déterminant et de parité .
Le ( n − 1 ) {displaystyle (n-1)} 




- perpendiculaire à l’hyperplan défini par la v i , {displaystyle v_{i},}
- magnitude est le volume du parallélotope défini par la v i , {displaystyle v_{i},}
qui peut être calculé comme le déterminant de Gram de la v i , {displaystyle v_{i},}
- orienté de sorte que v 1 , … , v n {displaystyle v_{1},dots ,v_{n}}
est orienté positivement.


Il s’agit de l’unique produit multilinéaire alterné qui évalue à e 1 × ⋯ × e n − 1 = e n {displaystyle e_{1}times cdots times e_{n-1}=e_{n}} 

En coordonnées, on peut donner une formule pour cela ( n − 1 ) {displaystyle (n-1)}
⋀ i = 0 n − 1 v i = | v 1 1 ⋯ v 1 n ⋮ ⋱ ⋮ v n − 1 1 ⋯ v n − 1 n e 1 ⋯ e n | . {displaystyle bigwedge _{i=0}^{n-1}mathbf {v} _{i}={begin{vmatrix}v_{1}{}^{1}&cdots &v_{1} {}^{n}\vdots &ddots &vdots \v_{n-1}{}^{1}&cdots &v_{n-1}{}^{n}\mathbf { e} _{1}&cdots &mathbf {e} _{n}end{vmatrix}}.} 
Cette formule est identique dans sa structure à la formule du déterminant pour le produit croisé normal dans R 3 sauf que la rangée de vecteurs de base est la dernière rangée du déterminant plutôt que la première. La raison en est de s’assurer que les vecteurs ordonnés ( v 1 , …, v n −1 , Λn -1
je=0v i ) ont une orientation positive par rapport à ( e 1 , …, e n ). Si n est impair, cette modification laisse la valeur inchangée, donc cette convention est conforme à la définition normale du produit binaire. Dans le cas où n est pair, cependant, la distinction doit être maintenue. Cette ( n − 1 ) {displaystyle (n-1)}
Histoire
En 1773, Joseph-Louis Lagrange a introduit la forme composante des produits scalaires et croisés afin d’étudier le tétraèdre en trois dimensions. [22] En 1843, William Rowan Hamilton a introduit le produit quaternion , et avec lui les termes “vecteur” et “scalaire”. Étant donné deux quaternions [0, u ] et [0, v ] , où u et v sont des vecteurs dans R 3 , leur produit quaternion peut être résumé comme [− u ⋅ v , u × v ]. James Clerk Maxwell a utilisé les outils de quaternion de Hamilton pour développer ses fameuses équations d’électromagnétisme , et pour cela et d’autres raisons, les quaternions ont pendant un certain temps été une partie essentielle de l’enseignement de la physique.
En 1878 , William Kingdon Clifford a publié ses Elements of Dynamic qui était un texte avancé pour son époque. Il a défini le produit de deux vecteurs [23] comme ayant une grandeur égale à l’ aire du parallélogramme dont ils sont deux côtés, et une direction perpendiculaire à leur plan.
Oliver Heaviside et Josiah Willard Gibbs ont également estimé que les méthodes de quaternion étaient trop lourdes, nécessitant souvent l’extraction de la partie scalaire ou vectorielle d’un résultat. Ainsi, environ quarante ans après le produit quaternion, le produit scalaire et le produit croisé ont été introduits – dans une vive opposition. L’efficacité de la nouvelle approche était essentielle à l’acceptation (éventuelle), permettant à Heaviside de réduire les équations de l’électromagnétisme des 20 d’origine de Maxwell aux quatre couramment observées aujourd’hui. [24]
Largement indépendant de ce développement, et largement méconnu à l’époque, Hermann Grassmann a créé une algèbre géométrique non liée à la dimension deux ou trois, le produit extérieur jouant un rôle central. En 1853 , Augustin-Louis Cauchy , un contemporain de Grassmann, publie un article sur les clés algébriques qui servaient à résoudre des équations et avaient les mêmes propriétés de multiplication que le produit croisé. [25] [26] Clifford a combiné les algèbres de Hamilton et Grassmann pour produire l’ algèbre de Clifford , où dans le cas de vecteurs tridimensionnels le bivecteur produit à partir de deux vecteurs se dualise en un vecteur, reproduisant ainsi le produit croisé.
La notation croisée et le nom “produit croisé” ont commencé par Gibbs. À l’origine, ils sont apparus dans des notes publiées en privé pour ses étudiants en 1881 comme d’éléments d’analyse vectorielle . L’utilité pour la mécanique a été notée par Aleksandr Kotelnikov . La notation de Gibbs et le nom de “produit croisé” ont ensuite atteint un large public grâce à Vector Analysis , un manuel d’ Edwin Bidwell Wilson , un ancien élève. Wilson a réorganisé le matériel des conférences de Gibbs, ainsi que le matériel des publications de Heaviside, Föpps et Hamilton. Il a divisé l’analyse vectorielle en trois parties :
Premièrement, ce qui concerne l’addition et les produits scalaires et vectoriels de vecteurs. Deuxièmement, ce qui concerne le calcul différentiel et intégral dans ses relations avec les fonctions scalaires et vectorielles. Troisièmement, celui qui contient la théorie de la fonction vectorielle linéaire.
Deux principaux types de multiplications de vecteurs ont été définis, et ils ont été appelés comme suit :
- Le produit direct , scalaire ou scalaire de deux vecteurs
- Le asymétrie , le vecteur ou le produit croisé de deux vecteurs
Plusieurs types de produits triples et produits de plus de trois vecteurs ont également été examinés. L’expansion du triple produit mentionnée ci-dessus a également été incluse.
Voir également
- Produit cartésien – Un produit de deux ensembles
- Algèbre géométrique : systèmes tournants
- Produits croisés multiples – Produits impliquant plus de trois vecteurs
- Multiplication de vecteurs
- Produit quadruple
- × (le symbole)
Remarques
- ↑ Ici, « formel » signifie que cette notation a la forme d’un déterminant, mais n’adhère pas strictement à la définition ; c’est un mnémonique utilisé pour se souvenir de l’expansion du produit croisé.
- ↑ Par forme volumique, on entend une fonction qui prend en n vecteurs et donne un scalaire, le volume du parallélotope défini par les vecteurs : V × ⋯ × V → R . {displaystyle Vtimes cdots times Vto mathbf {R} .}
Il s’agit d’une forme antisymétrique multilinéaire n -aire. En présence d’une base, comme sur R n , { displaystyle mathbf {R} ^ {n},}
ceci est donné par le déterminant, mais dans un espace vectoriel abstrait, c’est une structure ajoutée. En termes de G -structures , une forme volumique est une S L {displaystyle SL}
-structure.


Références
- ^ un bcdef Weisstein , Eric W. ” Produit croisé ” . mathworld.wolfram.com . Récupéré le 06/09/2020 .
- ^ un bc “le Produit Croisé ” . www.mathsisfun.com . Récupéré le 06/09/2020 .
- ^ Massey, William S. (décembre 1983). “Produits croisés de vecteurs dans des espaces euclidiens de dimension supérieure” (PDF) . Le mensuel mathématique américain . 90 (10): 697–701. doi : 10.2307/2323537 . JSTOR 2323537 . S2CID 43318100 . Archivé de l’original (PDF) le 2021-02-26. Si l’on ne demande que trois propriétés de base du produit croisé … il s’avère qu’un produit croisé de vecteurs n’existe que dans l’espace euclidien à 3 et 7 dimensions.
- ^ Jeffreys, H; Jeffreys, BS (1999). Méthodes de physique mathématique . La presse de l’Universite de Cambridge. OCLC 41158050 .
- ^ Acheson, DJ (1990). Dynamique des fluides élémentaire . Presse universitaire d’Oxford. ISBN 0198596790.
- ^ Howison, Sam (2005). Mathématiques Appliquées Pratiques . La presse de l’Universite de Cambridge. ISBN 0521842743.
- ^ Wilson 1901 , p. 60–61
- ^ Dennis G. Zill; Michael R. Cullen (2006). “Définition 7.4 : Produit croisé de deux vecteurs” . Mathématiques d’ingénierie avancées (3e éd.). Jones & Bartlett Apprentissage. p. 324.ISBN _ 0-7637-4591-X.
- ^ un b Une Histoire d’Analyse de Vecteur par Michael J. Crowe , Math. UC Davis
- ^ Dennis G. Zill; Michael R. Cullen (2006). “Équation 7 : a × b comme somme de déterminants” . travail cité. Jones & Bartlett Apprentissage. p. 321.ISBN _ 0-7637-4591-X.
- ^ M. Spiegel; S. Lipschutz; D. Spellman (2009). Analyse vectorielle . Les contours de Schaum. McGraw Hill. p. 29. ISBN 978-0-07-161545-7.
- ^ WS Massey (décembre 1983). “Produits croisés de vecteurs dans des espaces euclidiens de dimension supérieure”. Le mensuel mathématique américain . Le mensuel mathématique américain, vol. 90, n° 10. 90 (10) : 697–701. doi : 10.2307/2323537 . JSTOR 2323537 .
- ^ Vladimir A. Boichenko; Gennadiĭ Alekseevich Leonov ; Volker Reitmann (2005). Théorie des dimensions pour les équations différentielles ordinaires . Vieweg+Teubner Verlag. p. 26. ISBN 3-519-00437-2.
- ^ Pertti Lounesto (2001). Algèbres et spineurs de Clifford (2e éd.). La presse de l’Universite de Cambridge. p. 94. ISBN 0-521-00551-5.
- ^ un b Shuangzhe Liu; Gõtz Trenkler (2008). “Hadamard, Khatri-Rao, Kronecker et autres produits matriciels” (PDF) . Int J Sciences de l’information et des systèmes . Institut de calcul scientifique et d’éducation. 4 (1): 160–177.
- ^ par Eric W. Weisstein (2003). “Identité Binet-Cauchy” . Encyclopédie concise des mathématiques du CRC (2e éd.). Presse CRC. p. 228. ISBN 1-58488-347-2.
- ^ un b Lounesto, Pertti (2001). Algèbres de Clifford et spineurs . Cambridge : Cambridge University Press. p. 193 . ISBN 978-0-521-00551-7.
- ^ Greub, W (1978). Algèbre multilinéaire .
- ^ Hogben, L. , éd. (2007). Manuel d’algèbre linéaire . [ page nécessaire ]
- ^ Arthur, John W. (2011). Comprendre l’algèbre géométrique pour la théorie électromagnétique . IEEE Appuyez sur . p. 49. ISBN 978-0470941638.
- ^ Doran, Chris; Lasenby, Anthony (2003). Algèbre géométrique pour les physiciens . Presse universitaire de Cambridge . p. 401–408. ISBN 978-0521715959.
- ^ Lagrange, JL (1773). “Solutions analytiques de quelques problèmes sur les pyramides triangulaires”. Oeuvres . Vol. 3.
- ^ William Kingdon Clifford (1878) Elements of Dynamic [ lien mort permanent ] , Partie I, page 95, Londres : MacMillan & Co ; présentation en ligne par Cornell University Historical Mathematical Monographs
- ^ Nahin, Paul J. (2000). Oliver Heaviside : la vie, le travail et l’époque d’un génie électrique de l’époque victorienne . Presse JHU. p. 108-109 . ISBN 0-8018-6909-9.
- ^ Crowe, Michael J. (1994). Une histoire de l’analyse vectorielle . Douvres. p. 83 . ISBN 0-486-67910-1.
- ↑ Cauchy, Augustin-Louis (1900). Ouvres . Vol. 12. p. 16 .
Bibliographie
- Cajori, Florian (1929). Une histoire des notations mathématiques Volume II . Publication de la Cour ouverte . p. 134. ISBN 978-0-486-67766-8.
- EA Milne (1948) Vectorial Mechanics , Chapitre 2 : Vector Product, pp 11 –31, Londres : Methuen Publishing .
- Wilson, Edwin Bidwell (1901). Analyse vectorielle : un manuel à l’usage des étudiants en mathématiques et en physique, fondé sur les conférences de J. Willard Gibbs . Presse universitaire de Yale .
- T. Lévi-Civita ; U. Amaldi (1949). Lezioni di meccanica razionale (en italien). Bologne : éditeur Zanichelli.
Liens externes
- “Produit croisé” , Encyclopedia of Mathematics , EMS Press , 2001 [1994]
- Une dérivation géométrique rapide et une interprétation des produits croisés
- Un tutoriel interactif créé à l’Université de Syracuse – (nécessite java )
- W. Kahan (2007). Produits croisés et rotations dans l’espace euclidien 2 et 3. Université de Californie, Berkeley (PDF).
- Le produit vectoriel , Mathcentre (Royaume-Uni), 2009